



1.分类和结构
脉冲编码器是一种旋转式脉冲发生器。它把机械转角变成电脉冲,是一种常用的角位移传感器。脉冲编码器分光电式、接触式和电磁感应式三种。光电式的精度与可靠性都优于其他两种,因此数控机床上只使用光电式脉冲编码器。由霍尔效应构成的电磁感应或脉冲发生器也有用作速度检测的。光电脉冲编码器按每转发出的脉冲数的多少来分,又有多种型号,但数控机床最常用的如表6-6所列。根据机床滚珠丝杠螺距来选用相应的脉冲编码器。
表6-6 光电脉冲发生器
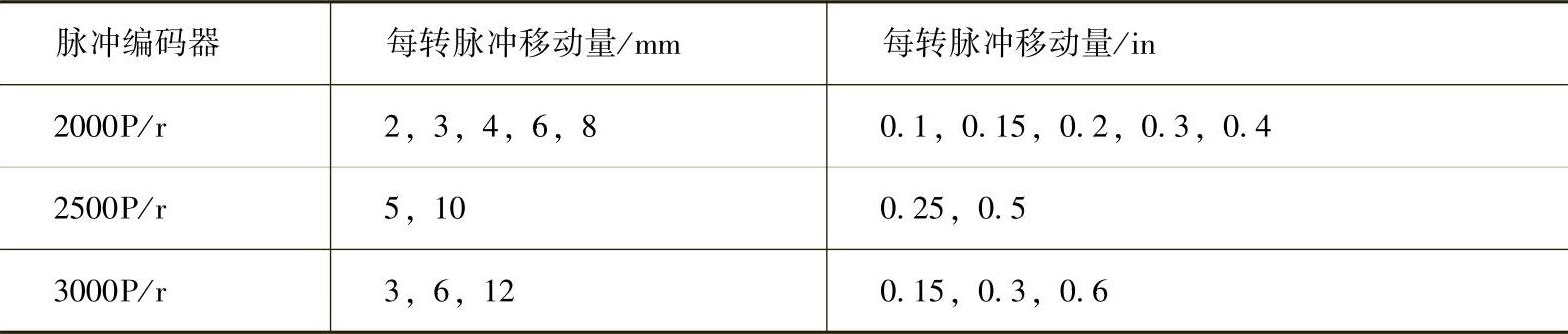
注:1in=25.4mm。
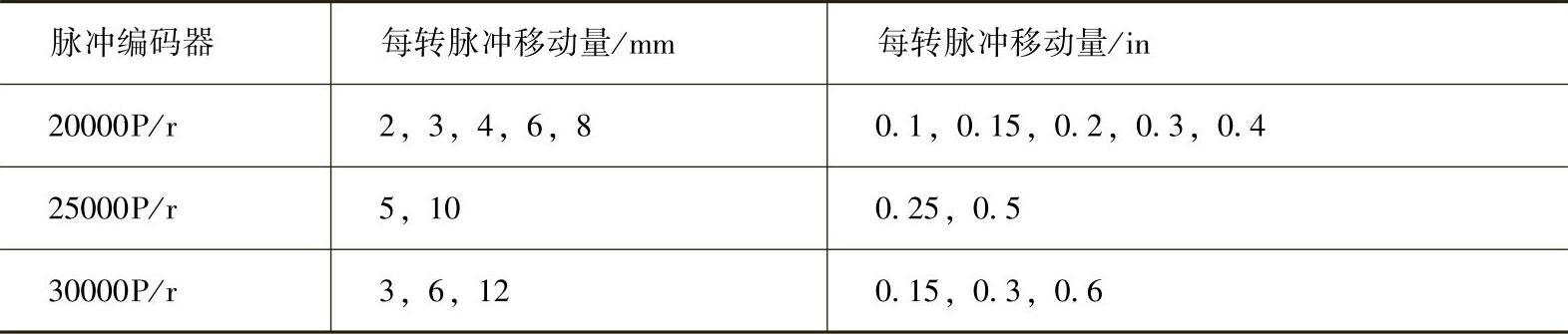
为了适应高速、高精度数字伺服系统的需要,先后又发展了高分辨率的脉冲编码器,见表6-7。
表6-7 高分辨率脉冲编码器
增量式光电脉冲编码器(见图6-31)最初的结构就是一种光电盘。在一个圆盘的圆周上分成相等的透明与不透明部分,圆盘与工作油一起旋转。此外还有一个固定不动的扇形薄片与圆盘平行放置,并制作有辨向狭缝(或狭缝群),当光线通过这两个作相对运动的透光与不透光部分时,使光电元件接受到的光通量也时明时暗地连续变化(近似于正弦信号),经放大、整形电路的变换后变成脉冲信号。通过计量脉冲的数目和频率即可测出工作轴的转角和转速。
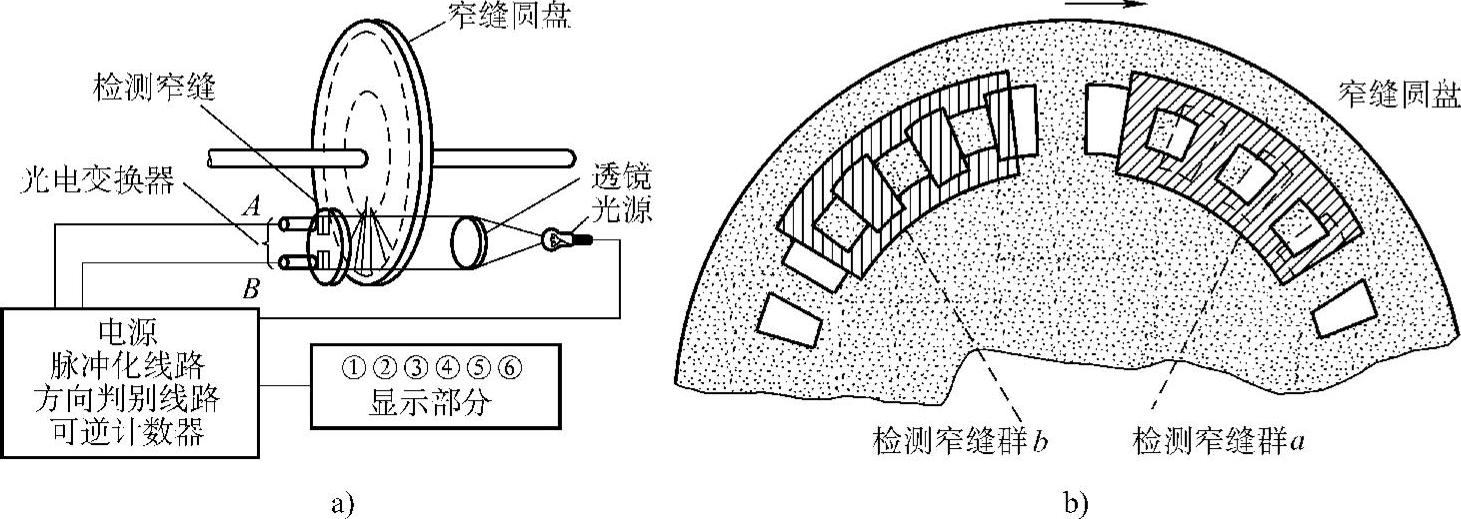
图6-31 增量式光电脉冲编码器
高精度脉冲编码器要求提高光电盘圆周的等分狭缝的密度,实际上变成了圆光栅线纹。它的制作工艺是在一块具有一定直径的玻璃圆盘上,用真空镀膜的方法镀上一层不透光的金属薄膜,再涂上一层均匀的感光材料,然后用精密照相腐蚀工艺,制成沿圆周等距的透光和不透光部分相间的辐射状线纹。一个相邻的透光与不透光线纹构成一个节距P。在圆盘的里圈不透光圆环上还刻有一条透光条纹,用来产生一转脉冲信号。辨向指示光栅上有两段线纹组A和B,每一组的线纹间的节距与圆光栅相同,而A组与B组的线纹彼此错开1/4节距。指示光栅固定在底座上,与圆光栅的线纹平行放置,两者间保持一个小的间距。当圆光栅旋转时,光线透过这两个光栅的线纹部分,形成明暗相间的条纹,被光电元件接受,并变换成测量脉冲,其分辨率取决于圆光栅的一圈线纹数和测量线路的细分倍数。
该编码器通过十字连接头与伺服电动机连接,它的法兰盘固定在电动机端面上,罩上防护罩,构成无整的驱动部件。
光电脉冲编码器的结构示意图如图6-32所示。
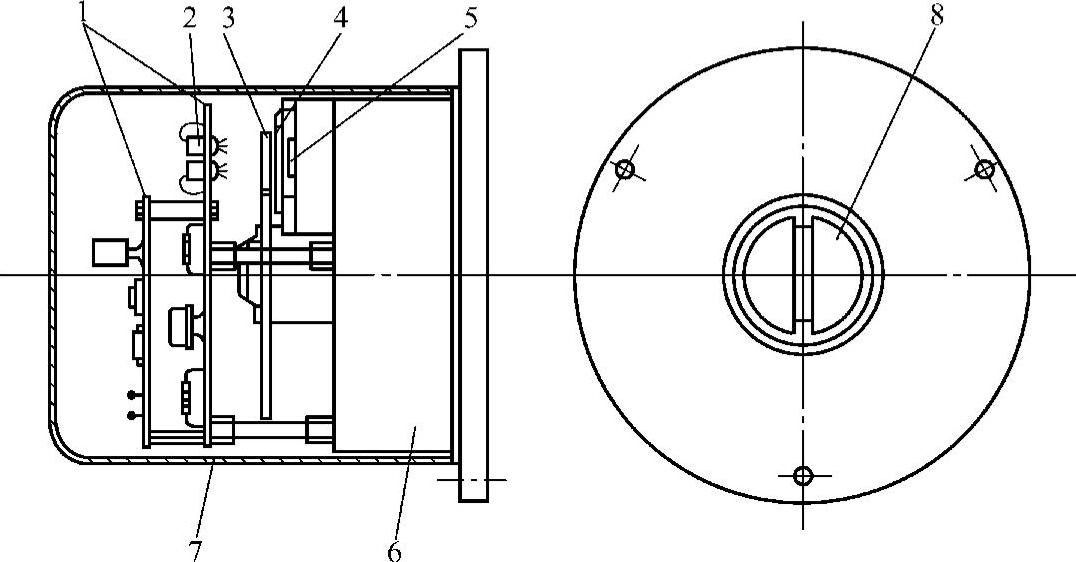
图6-32 光电脉冲编码器的结构示意图
1—印制电路板 2—光源 3—圆光栅 4—指示光栅 5—光电池组 6—底座 7—护罩 8—轴
2.工作原理
如上所述,光线透过圆光栅和指示光栅的线纹,在光电元件上形成明暗交替变化的条纹,产生两组近似于正弦波的电流信号A与B,两者的相位相差90°,经放大、整形电路变成方波(见图6-33)。若A相超前于B相,对应电动机作正向旋转;若B相超前于A相,对应电动机作反相旋转。若以该方波的前沿或后沿产生计数脉冲,可以形成代表正向位移和反向位移的脉冲序列。(https://www.xing528.com)
Z相是一转脉冲,它是用来产生机床的基准点的。通常,数控机床的机械参考点与各轴的脉冲编码器发Z相脉冲的位置是一致的。
在应用时,从脉冲编码器输出的A和 ,B和
,B和 四个方波被引入位置控制回路,经辨向和乘以倍率后,变成代表位移的测量脉冲。经频率—电压变换器变成正比于频率的电压,作为速度反馈信号,供给速度控制单元,进行速度调节。
四个方波被引入位置控制回路,经辨向和乘以倍率后,变成代表位移的测量脉冲。经频率—电压变换器变成正比于频率的电压,作为速度反馈信号,供给速度控制单元,进行速度调节。
图6-34a为光电脉冲编码器的信号处理线路图。其中施密特触发器作为放大整形用。它将相差90°的二组正弦波电流信号A与B,放大整形为方波。若A相超前B相90°(图6-34c)则输出正转脉冲列G;若A相落后B相90°(见图6-34b),则输出反转脉冲列F。若门电路如图6-24b、c所示由与或门组成,则在输入信号一周期内有4个脉冲输出,即把与位移(转角)成正比的栅距角或莫尔条纹宽度细分成四等份了。
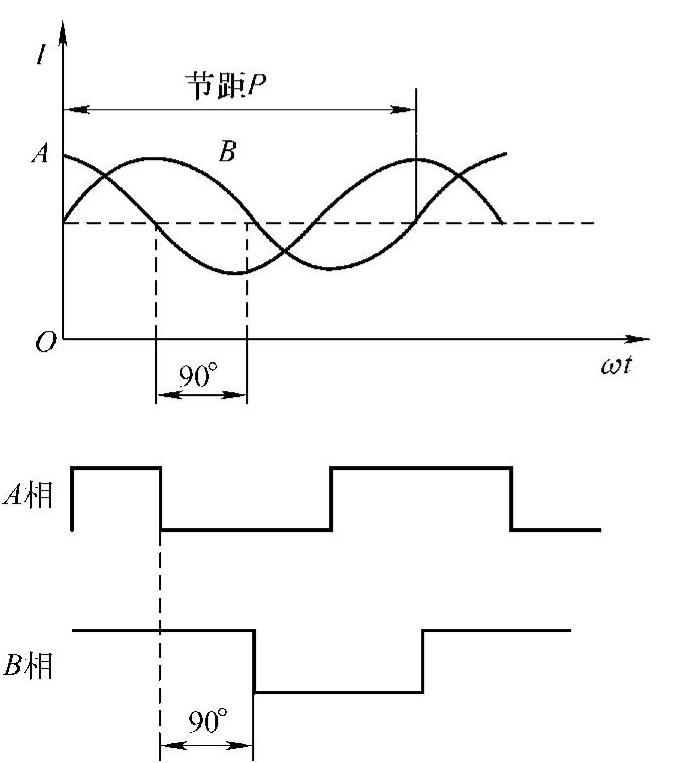
图6-33 脉冲编码器的输出波形
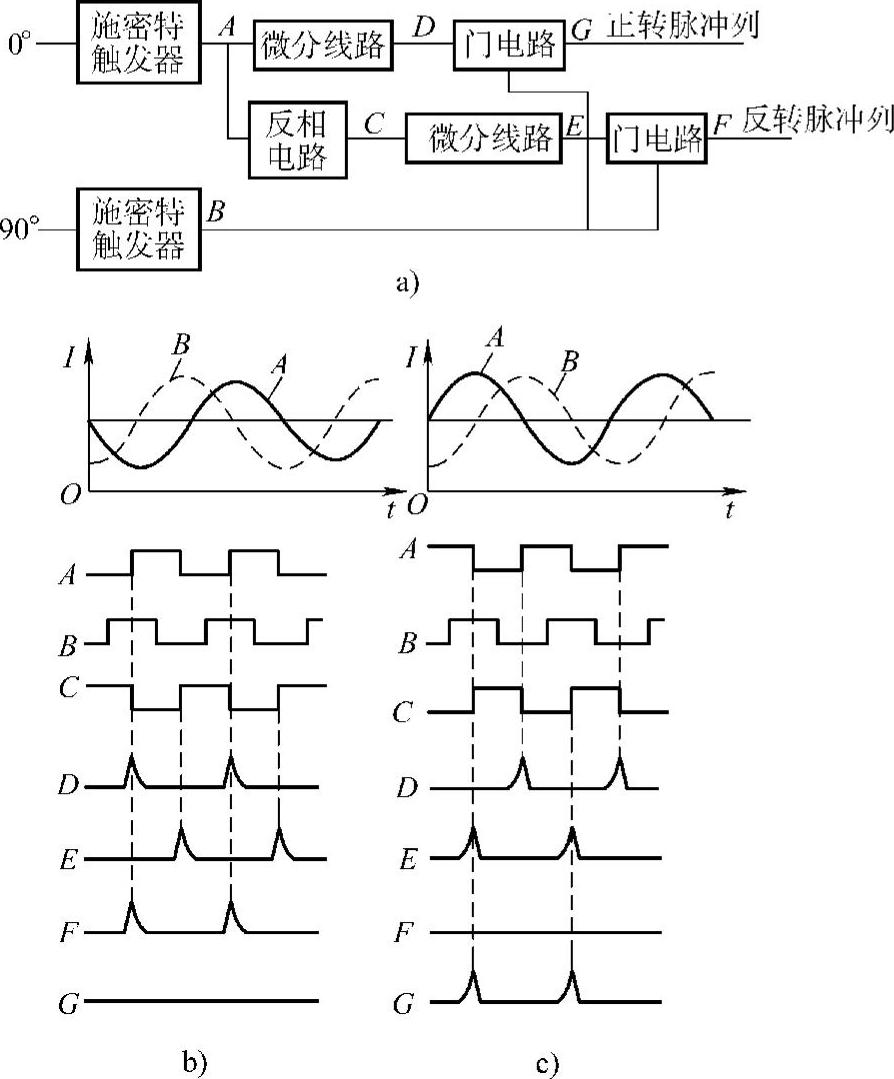
图6-34 信号处理线路和光电输出波形图
脉冲编码器主要技术性能如下:
电源 5V±5%,≤0.35A
输出信号 
每转脉冲数 2000,2500
(普通型) 3000
最高转速 2000r/min
温度范围 0~60℃
轴向窜动 0.02mm
转动惯量 <5.7kg·cm2
质量 2.0kg
阻尼转矩 <8N·cm
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。