



采用相位比较方法实现位置闭环控制的伺服系统,是高性能数控机床中所使用的一种伺服系统(以下简称相位伺服系统)。
相位伺服系统的核心问题是,如何把位置检测转换为相应的相位检测,并通过相位比较实现对驱动执行元件的速度控制。
图5-33是一个采用感应同步器作为位置检测元件的相位伺服系统原理框图。
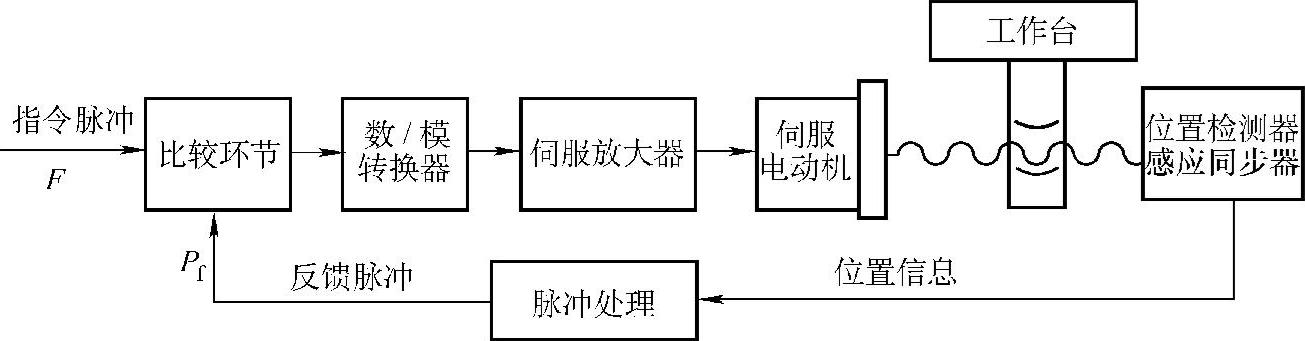
图5-33 相位比较伺服系统原理框图
在该系统中,感应同步器取相位工作状态,以定尺的相位检测信号经整形放大后所得的PB(θ)作为位置反馈信号。指令脉冲F经脉冲调相后,转换成重复频率为f0的脉冲信号PA(θ)。PA(θ)和PB(θ)为两个同频的脉冲信号,它们的相位差Δθ反映了指令位置与实际位置的偏差,由鉴相器判别检测。伺服放大器和伺服电动机构成的调速系统,接受相位差Δθ信号以驱动工作台朝指令位置进给,实现位置跟踪。该伺服系统的工作原理概述如下:
当指令脉冲F=0且工作台处于静止时,PA(θ)和PB(θ)应为两个同频同相的脉冲信号,经鉴相器进行相位比较判别,输出的相位差Δθ=0。此时,伺服放大器的速度给定为0,它输出到伺服电动机的电枢电压亦为0,工作台维持在静止状态。
当指令脉冲F≠0时,工作台将从静止状态向指令位置移动。这时若设F为正,经过脉冲调相器,PA(θ)产生正的相移+θ,亦即在鉴相器的输出将产生Δθ=+θ>0。因此,伺服驱动部分应按指令脉冲的方向使工作台作正向移动,以消除PA(θ)和PB(θ)的相位差。反之,若设F为负,则PA(θ)产生负的相移-θ,在Δθ=-θ0<0的控制下,伺服机构应驱动工作台作反向移动。
因此,无论工作台在指令脉冲的作用下作正向或反向运动,反馈脉冲信号PB(θ)的相位必须跟随指令脉冲信号PA(θ)的相位作相应的变化。位置伺服系统要求,PA(θ)相位的变化应满足指令脉冲的要求,而伺服电动机则应有足够大的驱动力矩使工作台向指令位置移动,位置检测元件则应及时地反映实际位置的变化,改变反馈脉冲信号PB(θ)的相位,满足位置闭环控制的要求。一旦F为0,正在运动着的工作台应迅速制动,这样PA(θ)和PB(θ)在新的相位值上继续保持同频同相的稳定状态。
下面着重讨论该相位伺服系统中,脉冲调相和鉴相器的工作原理。
(1)脉冲调相器 脉冲调相器也称数字移相电路,其功能为按照所输入指令脉冲的要求对载波信号进行相位调制。图5-34为脉冲调相器组成原理。
在该脉冲调相器中,基准脉冲f0由石英晶体振荡器组成的脉冲发生器产生,以获得频率稳定的载波信号。f0信号输出分成两路,一路直接输入M分频的二进制计数器,称为基准分频通道;另一路则先经过加减器再进入分频数也为M的二进制数计数器,称为调相分频通道。上述两个计数器均为M分频,即当输入M个计数脉冲后产生一个溢出脉冲。
基准分频通道应该输出两路频率和幅值相同,但相位互差90°的电压信号,以供给感应同步器滑尺的正余弦绕组激磁。为了实现这一要求,可将该通道中的最末一级计数触发器分成两个,接法如图5-35所示。由于最后一级触发器的输入脉冲相差180°,所以经过一次分频后,它们的θ输出端的相位互差90°。
由脉冲调相器基准分频通道输出的矩形脉冲,应经过滤除高频分量及功率放大后才能形成供给滑尺励磁的正余弦信号Us和Uc。然后,由感应同步器电磁感应作用,可在其定尺是取得相应的感应电动势E0,再经滤波放大,就可获得用作位置反馈的脉冲信号PB(θ)。
调相分频通道的任务是在指令脉冲的参与下输出脉冲信号PA(θ)。在该通道中,加减器的作用是:当指令脉冲F为零时,使其输出信号f0′ =f0,即调相分频计数器与基准分频计数器完全同频同相工作。因此,PA(θ)和PB(θ)必然同频同相,两者相位差Δθ=0;当F≠0时,加减器按照正的指令脉冲使f0′ 脉冲数增加,负的指令脉冲使f0′ 脉冲数减少的原则,使得输入到调相分频器中的计数脉冲个数发生变化。结果是该分频器产生溢出脉冲的时刻将提前或者推迟产生,因此,在指令脉冲的作用下,PA(θ)不再保持与PB(θ)同相。其相位差大小和极性与指令脉冲F有关。
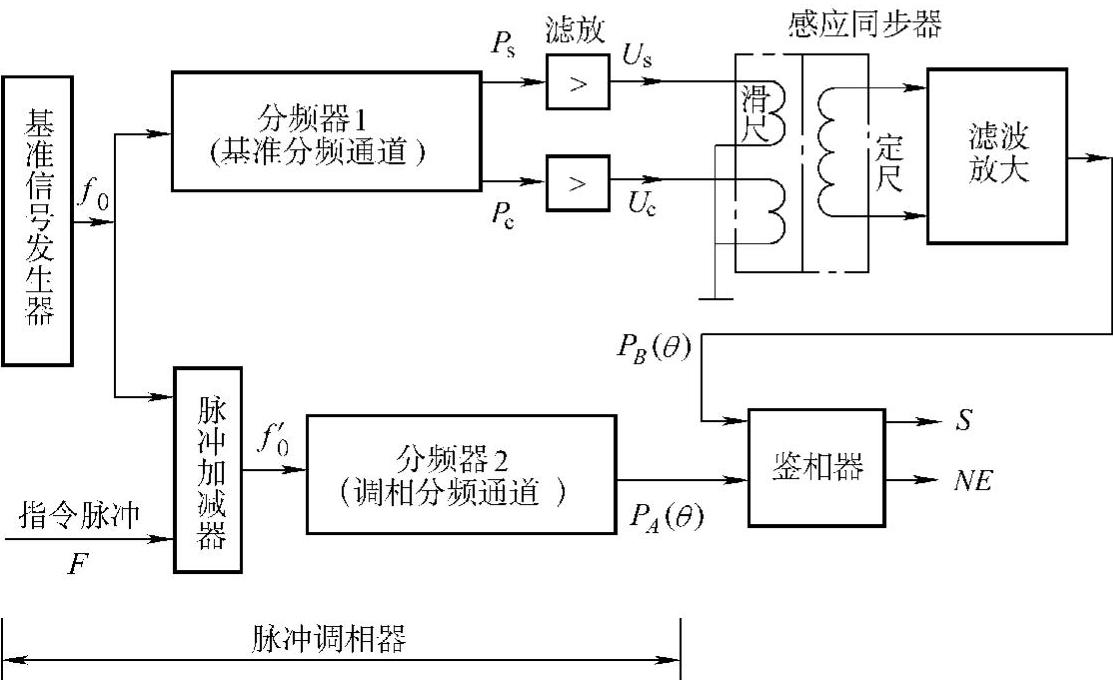
图5-34 脉冲调相器组成原理
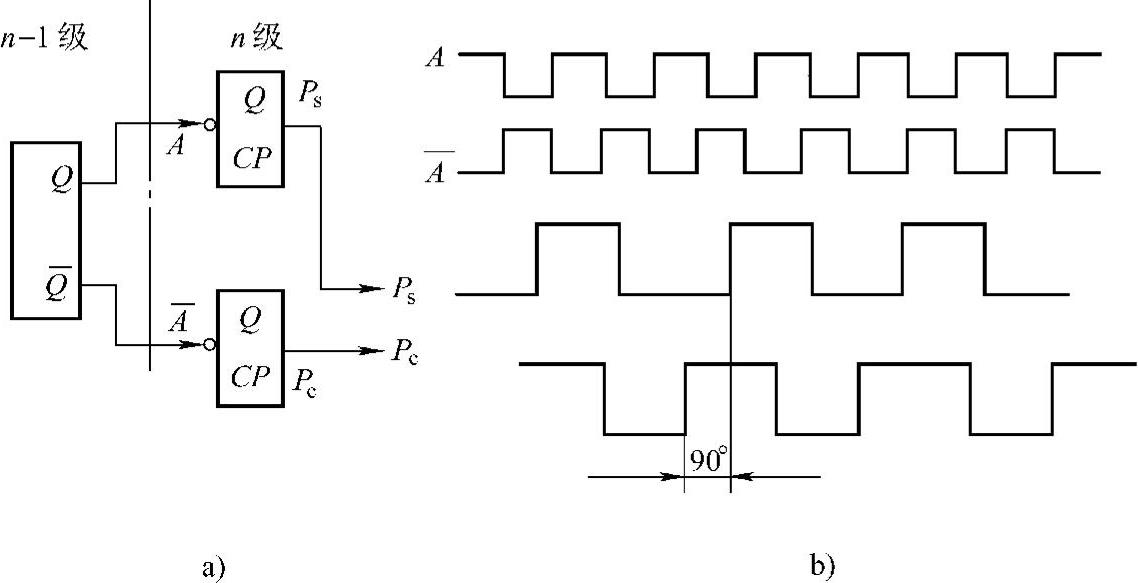
图5-35 基准分频器末级相差90°输出
a)原理图 b)波形图
下面举例说明指令移相的情况。为了便于叙述,设两个分频器均由四个十六进制计数触发器C0~C3组成(见图5-36),分频数m=24=16。即,每输入16个脉冲产生一个溢出脉冲信号。对应F=0、F=+1和F=-1的三种情况,可用波形图具体叙述如下:
1)指令脉冲F=0的情况。当F=0时,调相分频计数脉冲f0′就等于基准脉冲f0。计数触发器C0~C3按二进制数方式逐个进位计数。其中,设C0为最低位,C3为最高位。工作时的时序波形如图5-36所示。由于F=0时,f0′与f0相等,则反映指令脉冲输入的PA(θ)亦应该与位置反馈信号PB(θ)同频同相,两者的相位差Δθ=0。
2)指令脉冲F=+1的情况。波形图如图5-37所示。F=+1,表示此时脉冲移相的输入端接收到一个正向指令脉冲。由图可知,这时计数脉冲f0′在基准脉冲的基础上插入了一个脉冲,因此调相分频计数器将比基准分频器提前一个时钟周期T0产生溢出脉冲。因此,此时PA(θ)的波形相位将比PB(θ)超前,记作Δθ=+T0>0。(https://www.xing528.com)
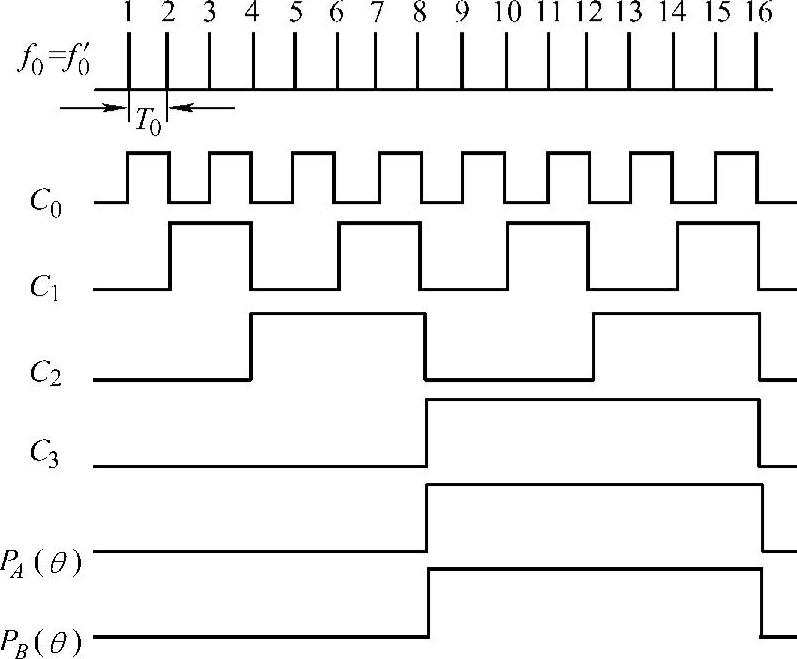
图5-36 F=0时的时序波形图(Δθ=0)
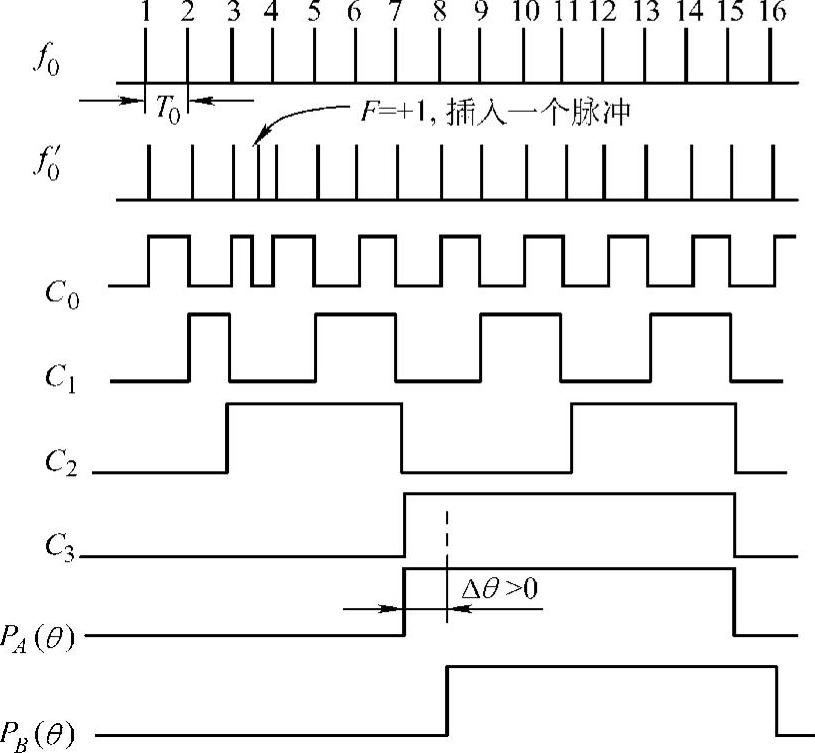
图5-37 F=+1时的时序波形图(Δθ>0)
3)指令脉冲F=-1的情况。波形图如图5-38所示。F=+1,表示此时加入一个负向指令脉冲,则f0′ 为在f0的基础上减去一个时钟脉冲周期T0才有溢出脉冲,则PA(θ)波形的相位应滞后于PA(θ),记作Δθ=-T0<0。
由上述指令移相的原理可知,对应于每个指令脉冲所产生的相移角Δθ,若记作θ0,其量值与分频器的容量有关。例如,在上述示例中,分频系数m=16,则θ0=360°/16=22.5°,当相移角θ0要求为某个设定值时,可由下式计算所需要的m值:
m=360°/θ0 (5-21)
例如,设某数控机床的脉冲当量δ=0.002mm,感应同步器的极距2τ=2mm,则单位脉冲所对应的相位角θ0=δ×360°/2C=0.002×360°/2=0.36°。由式(5-21)计算,可知分频系数m=360°/θ0=360°/0.36°=1000。分频器输入的基准脉冲频率将是激磁频率的m倍。例如,本示例的感应同步器激磁频率为10kHz,分频系数m=1000,则基准频率f0=1000×10kHz=10MHz
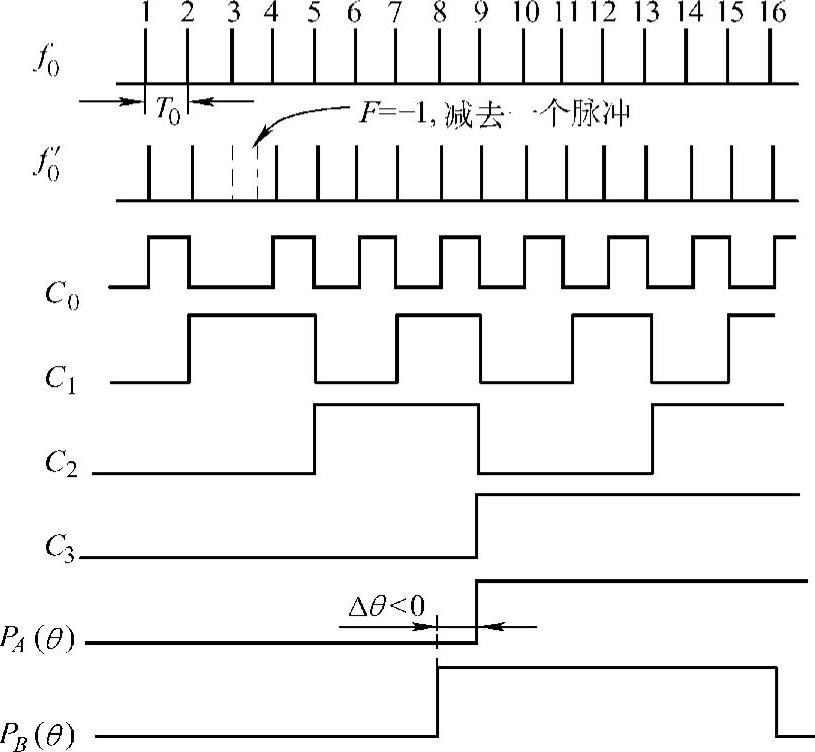
图5-38 F=-1时的时序波形图(Δθ<0)
(2)鉴相器 在一个相位系统中,指令信号的相位与实际位置检测所得的相位之间相位差是一个客观事实,则鉴相器的任务就是把它用适当的方式表示出来。图5-39是一种半加器鉴相器逻辑原理图。由脉冲移相和位置检测所得的脉冲信号PA(θ)和PB(θ)分别输入鉴相器的计数触发器T1和T2,经过二分频后所输出的 和
和 频率降低一半。鉴相器的输出信号有两个:S取为A和B信号的半加和,
频率降低一半。鉴相器的输出信号有两个:S取为A和B信号的半加和, ,其量值反映了相位差Δθ的绝对值。
,其量值反映了相位差Δθ的绝对值。
NE为一个D触发器的输出端信号,根据D端和CP端相位超前或滞后的关系,决定其输出的电压高低。
因此,鉴相器是完成脉冲相位—电压信号的转换电路。
由半加原理可知,同频脉冲信号A和B相位相同时,半加和S=0。然而,当A和B不同相时,无论两者超前或滞后的关系如何,S信号将是一个周期的方波脉冲,它的脉冲宽度与两者的相位差成正比。可以通过低通滤波的方法取出其直流分量,作为相位差Δθ的电平指示。
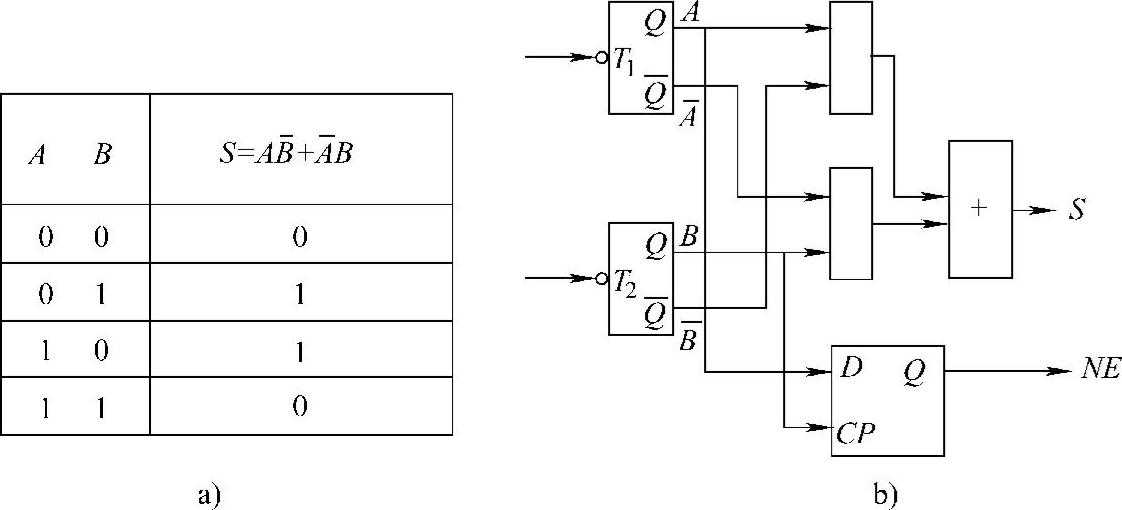
图5-39 半加器鉴相器逻辑原理图
a)真值表 b)原理图
相位差的极性由NE信号指示。由图5-39可见,对于由下降沿触发的D触发器,当接于D端的S信号超前B时,即A领先于B由“1”变为“0”,则D触发器的Q端就被置“0”,输出低电平。反之,当A滞后于B由“1”变为“0”,则D触发器将被置“1”,输出高电平。因此若把该输出端记作NE,NE=“0”表示指令信号的相位超前于位置信号,相位差为正;NE=“1”表示指令信号的相位滞后位置信号,相位差为负。
图5-40分别表示相位差Δθ在四种情况下,鉴相器输入信号PA(θ)、PB(θ),二分频后的信号A、B以及输出信号S和NE的波形。
下面讨论该半加器鉴相器的检测范围。由图5-40可知,当PA(θ)和PB(θ)的相位差超过180°后,两者的超前和滞后的关系会发生颠倒。现在是利用经过二分频后的A和B进行相位比较,因此其鉴相范围可扩大至±360°。
对于实际的位置检测器,如感应同步器的滑尺与定尺相对位移一个节距2τ,绝对长度仅2mm,相位差等于360°。为了扩大实际的检测范围,可在数控机床中设置绝对位置计数器,以节距数为单位,累计坐标位置的粗计数值。然后由感应同步器检测提供一个节距内的精确计数值。在条件允许的情况下,也可以用粗、中、精三套不同节距的感应同步器来测量绝对位置,例如节距分别为2mm、100mm和400mm。如果将这三套绕组做在一起,称为三重式或三速式感应同步器。在一些大型数控机床中,为了满足较长尺寸和高精度加工的要求,采用旋转变压器加感应同步器的方法实现位置检测。由旋转变压器作粗测,而感应同步器作精测。相比之下,这种方案实现起来容易一些。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。