



1.脉冲比较式进给位置伺服系统
图5-29所示为用于工件轮廓加工的一个坐标进给伺服系统,它包含速度控制单元和位置控制外环,由于它的位置环是按给定输入脉冲数和反馈脉冲数进行比较而构成闭环控制,所以称该系统为脉冲比较的位置伺服系统。
CNC装置经过插补运算得到指令脉冲序列fp。指令脉冲有两条通道,当指令方向为正时,fp从正向通道输入,反之fp则从反向通道输入。
位置检测器(光电脉冲编码器)输出的脉冲经过逻辑电路处理后成为反馈计数脉冲ff。反馈脉冲也有两条通道,当电动机实际转向为正时,ff从正向反馈通道输入,反之ff则从反向反馈通道输入。
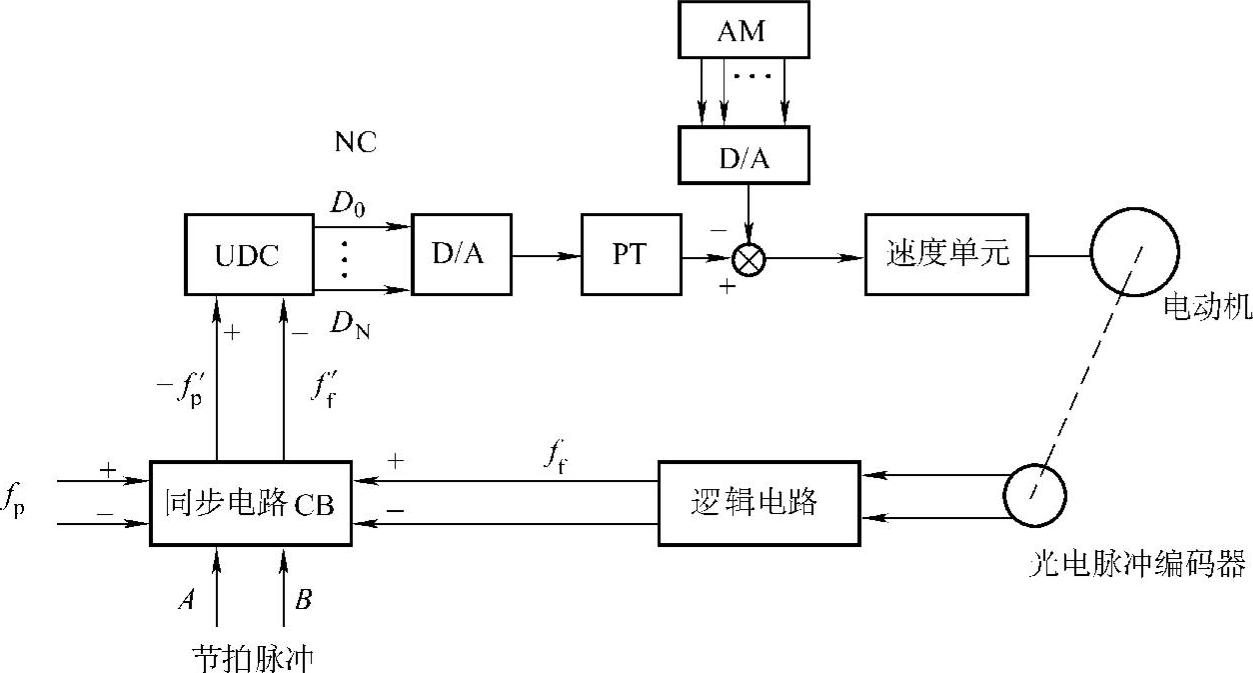
图5-29 脉冲比较式进给位置伺服系统
可逆计数器UDC是用来计算位置跟随误差的,这一误差记为Ne。位置跟随误差实际上就是位置指令脉冲个数与位置反馈脉冲个数之差。为了计算这一误差,应当将指令脉冲fp和反馈脉冲ff分别送入可逆计数器UDC的不同的计数输入端。
若运动指令方向和伺服电动机的实际运动方向都是正的,则跟随误差也是正的,参见图5-30a,这时应将指令脉冲从UDC的加法端输入,将反馈脉冲从UDC的减法端输入。
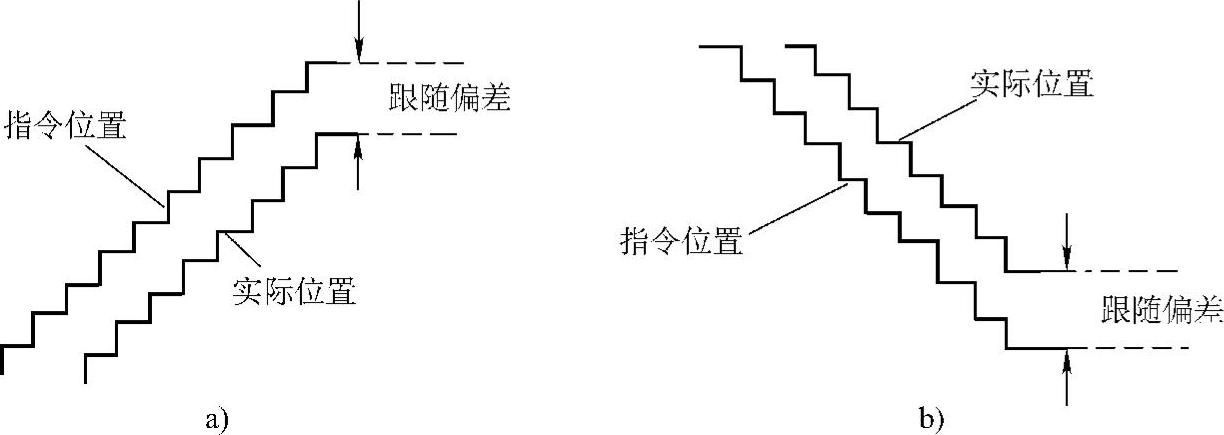
图5-30 位置跟踪误差
若运动指令方向和伺服电动机的实际运动方向是负的,则跟随误差也是负的,参见图5-30b。这时应将指令脉冲从UDC的减法端输入,将反馈脉冲从UDC的加法端输入。
由于在UDC的两个输入端同时送入脉冲ff和fp,可能引起可逆计数器工作不正常,为此设置了同步电路CB,由它保证送往计数器加端和减端的脉冲必定有一时间间隔。
另外,当变更运动方向时,指令脉冲已从原来的通道(正向)换成新的通道(反向),而伺服电动机的运动可能还在原来的方向,所以这时在可逆计数器UDC的同一个输入端上,既要接收指令脉冲,也要接收反馈脉冲。也就是说,在UDC的同一个输入端上,也存在着同步的问题,这也需要同步电路来解决。
同步电路要解决的是指令脉冲fp与反馈脉冲ff的同步问题,无论fp和ff实际是什么时刻到来的,必须保证它们作用于UDC输入端的时刻至少间隔Δt。同步电路共有四个完全相同的组件。CB1~CB4,分别基于两路节拍脉冲A和B进行工作。节拍脉冲A和B的频率要比指令脉冲fp和反馈脉冲ff的频率高得多。同步电路组件CB1和CB2实现节拍脉冲A对指令脉冲fp(正、负通道)的同步。同步电路组件CB3和CB4实现节拍脉冲B对反馈脉冲ff(正、负通道)的同步。A、B两路节拍脉冲互相间隔时间为Δt。同步电路工作波形见图5-31。(https://www.xing528.com)
在图5-31中,fp和ff分别作用于计数器的指令脉冲和反馈脉冲。
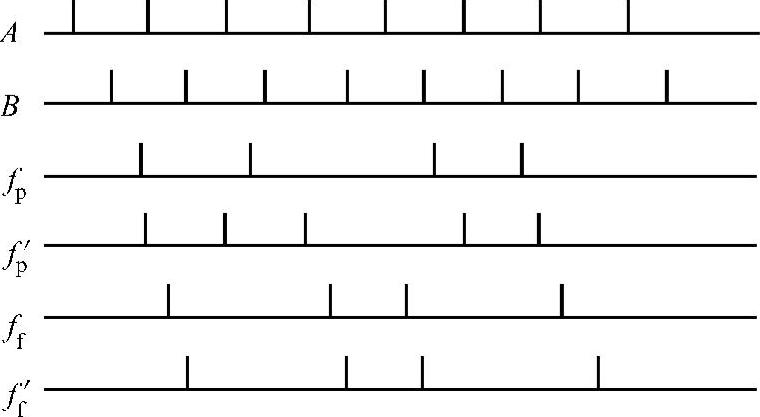
图5-31 同步电路工作波形
由可逆计数器UDC计算得出的位置跟随误差是数字量,对Ne进行数模转换后送入位置控制PT,PT实际上就是一个增益可控的比例放大器,PT的增益可由CNC装置设定。
AM是偏差补偿寄存器,AM中的值也可由CNC装置设定,其作用是对速度控制单元的死区进行补偿。AM中的数值经数模转换后与PT的输出信号相加,即为速度控制信号VCMD,这个信号送到速度控制单元。
随着数控技术的日益推广,在数控机床的位置伺服系统中,采用脉冲比较的方法构成集团闭环控制,受到了普遍的重视。这种系统的最主要优点是结构比较简单,易于实现数字化的闭环位置控制。目前,采用光电编码器(光电脉冲发生器)作位置检测元件,以半闭环的控制结构形式构成脉冲比较伺服系统,是中低档数控伺服系统中应用最普遍的一种。本节主要介绍应用光电编码器进行位置反馈及实现脉冲比较的位置控制原理与方法。
2.脉冲比较式进给伺服系统组成原理
图5-32为脉冲比较式伺服系统的结构图。整个系统按功能模块大致可分为三部分:采用光电脉冲编码器产生位置反馈脉冲Pf;实现指令脉冲F与反馈脉冲Pf的脉冲比较,以取得位置偏差信号e;以位置偏差e作为速度调节系统。本节着重对前两部分展开讨论。
我们知道,光电编码器与伺服电动机的转轴联接后,随着电动机的转动产生脉冲序列输出,其脉冲的频率将随着转速的快慢而升降。
现设指令脉冲F=0,且工作台原来处于静止状态。这时反馈脉冲Pf也为零,经比较环节可知偏差e=F-Pf=0,则伺服电动机的速度给定为零,工作台继续保持静止不动。
然后,设有指令脉冲加入,F≠0,则在工作台尚没有移动之前反馈脉冲Pf仍为零,经比较判别后可知偏差e≠0。若设F为正,则e=F-Pf>0,由调速系统驱动工作台向正向进给。随着电动机运转,光电编码器将输出的反馈脉冲Pf进入比较环节。该脉冲比较环节可看作为对两路脉冲序列的脉冲数进行比较。按负反馈原理,只有当指令脉冲F和反馈脉冲Pf的脉冲个数相当时,偏差e=0,工作台才重新稳定在指令所规定的位置上。由此可见,偏差e仍是数字量,若后续调速系统是一个模拟调节系统,则e需经数—模转换后才能成为模拟给定电压。对于指令脉冲F为负的控制过程与F为正时基本上类似。只是此时e<0,工作台应作反向进给。最后,也应在该指令所规定的反向某个位置e=0,伺服电动机停止转动,工作台准确地停在该位置上。
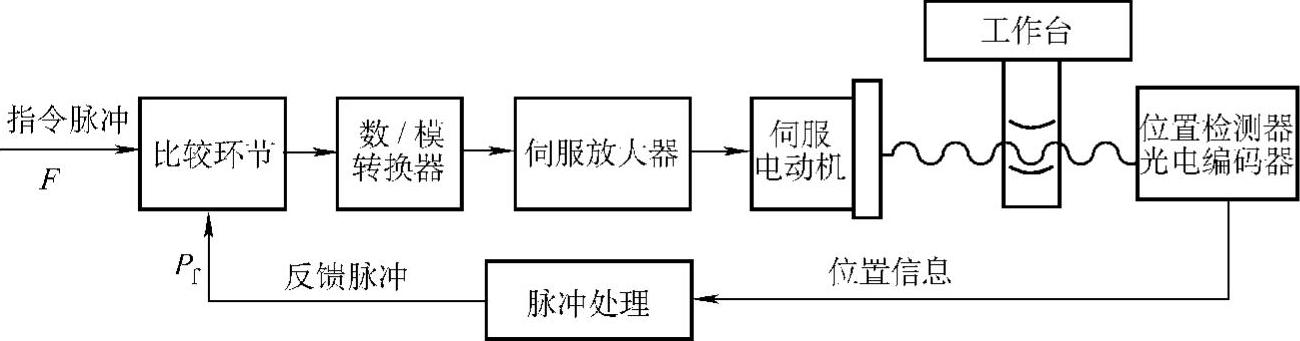
图5-32 脉冲比较式伺服系统结构框图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。