



1.步进电动机的主要特性
了解步进电动机的特性对正确使用步进电动机和正确设计步进电动机都有着重要意义,在了解步进电动机的特性之前,应当先了解一下步进电动机的工作方式。
(1)步进电动机的工作方式 由前述可知,步进电动机的工作方式和一般电动机的不同,是采用脉冲控制方式工作的。只有按一定规律对各相绕组轮流通电,步进电动机才能实现转动。数控机床中采用的功率步进电动机有三相、四相、五相和六相等。工作方式有单m拍,双m拍、三m拍及2m拍等,m是电动机的相数。所谓单m拍是指每拍只有一相通电,循环拍数为m;双m拍是指每拍同时有两相通电,循环拍数为m;三m拍是每拍有三相通电,循环拍数为m拍;2m拍是各拍即有单相通电,也有两相或三相通电,通常为1-2相通电或2-3相通电,循环拍数为2m,表5-1所示为一般电动机的相数越多,工作方式越多。若按和表5-1中相反的顺序通电,则电动机反转。
表5-1 反应式步进电动机的工作方式

由步距角计算式可知,循环拍数越多,步距角越小,因此定位精度越高。另外,通电循环拍数和每拍通电相数对步进电动机的矩频特性、稳定性等都有很大的影响。步进电动机的相数也对步进电动机的运行性能有很大影响。为提高步进电动机输出转矩、工作频率和稳定性,可选用多相步进电动机,并采用2m拍工作方式。但双m拍和2m拍工作方式功耗都比单m拍的大。
(2)步进电动机的性能指标 它的性能指标很多,从控制角度来看,我们最关心的是步进电动机的以下特性:
1)步距角。步进电动机的步距角θs是反映步进电动机定子绕组的通电状态每改变一次,转子转过的角度。它是决定步进伺服系统脉冲当量的重要参数。数控机床中常见的反应式步进电动机的步距角一般为0.75°~3°。一般,步距角越小,加工精度越高。
2)起动频率。空载时,步进电动机由静止状态突然起动,并进入不丢步的正常运行的最高频率,称为起动频率。加给步进电动机的指令脉冲频率如大于起动频率,就不能正常工作。步进电动机在带负载(尤其是惯性负载)下的起动频率比空载要低,而且,随着负载加大(在允许范围内),起动频率会进一步降低。
3)连续运行频率。步进电动机起动以后,其运行速度能跟踪指令脉冲频率连续上升而不丢步的最高工作频率,称为连续运行频率。其值远大于起动频率。它也随着电动机所带负载的性质和大小而异,与驱动电源也有很大关系。
4)加减速特性。步进电动机的加减速特性是描述步进电动机由静止到工作频率和由工作频率到静止的加减速过程中,定子绕组通电状态的变化频率与时间的关系。当要求步进电动机起动到大于突跳频率的工作频率时,变化速度必须逐渐上升;同样,从最高工作频率或高于突跳频率的工作频率到停止时,变化速度必须逐渐下降。逐渐上升和逐渐下降的加速时间、减速时间不能太小,否则会出现失步或超步。
除以上介绍的几种特性外,矩角特性和动态特性也是步进电动机很重要的特性。其中矩角特性反映了步进电动机的最大静力矩和启动力矩,动态特性描述了步进电动机各相定子绕组通断电时的动态过程。它们分别决定了步进电动机的带负载能力和动态精度。
2.步进电动机的选用
合理地选用步进电动机是相当重要的,通常希望步进电动机的输出转矩大,起动频率和运行频率高,步距误差小,性能价格比高。但增大转矩与快速运行存在一定矛盾,高性能与低成本存在矛盾。因此实际选用时,必须全面考虑。
首先,应考虑系统的精度和速度的要求。为了提高精度,希望脉冲当量小。但是脉冲当量越小,系统的运行速度越低。故应兼顾精度与速度的要求来选定系统的脉冲当量。在脉冲当量确定以后,又可以此为依据来选择步进电动机的步距角和传动机构的传动比。
步进电动机的步距角从理论上说是固定的,但实际上还是有误差的。另外,负载转矩也将引起步进电动机的定位误差。我们应将步进电动机的步距误差、负载引起的定位误差和传动机构的误差全部考虑在内,使总的误差小于数控机床允许的定位误差。
步进电动机有两条重要的特性曲线,即反映起动频率与负载转矩之间关系的曲线和反映转矩与连续运行频率之间关系的曲线。这两条曲线是选用步进电动机的重要依据。一般将反映起动频率与负载转矩之间关系的曲线称为起动矩频特性,将反映转矩与连续运行频率之间关系的曲线称为工作矩频特性。(https://www.xing528.com)
已知负载转矩,可以在起动矩频特性曲线中查出起动频率。这是起动频率的极限值,实际使用时,只要起动频率小于或等于这一极限值,步进电动机就可以直接带负载起动。
若已知步进电动机的连续运行频率f,就可以从工作矩频特性曲线中查出转矩Mdm,这也是转矩的极限值,有时称其为失步转矩。也就是说,若步进电动机以频率f运行,它所拖动的负载转矩必须小于Mdm,否则就会导致失步。
数控机床的运行可分为两种情况:快速进给和切削进给。在这两种情况下,对转矩和进给速度有不同的要求。在选用步进电动机时,应注意使在两种情况下都能满足要求。
假若要求进给驱动装置有如下性能:在切削进给时的转矩为Te,最大切削进给速度为ve;在快速进给时的转矩为Tk,最大快进速度为vk。根据上面的性能指标,我们可按下面的步骤来检查步进电动机能否满足要求。
首先,依据下式,将进给速度值转变成电动机的工作频率:

式中 v——进给速度(m/min);
δ——脉冲当量(mm);
f——步进电动机工作频率(Hz)。
在上式中,若将最大切削进给速度ve代入可求得在切削进给时的最大工作频率fe;若将最大快速进给速度vk代入,就可求得在快速进给时的最大工作频率fk。
然后,根据fe和fk在工作矩频特性曲线上找到与其对应的失步转矩值Tdme和Tdmk,若有Te<Tdme和Tk<Tdmk,就表明电动机是能满足要求的,否则就是不能满足要求的。
表5-2和表5-3分别给出了一些常用的反应式步进电动机和混合式步进电动机的型号和简单的性能参数,读者若想了解这些电动机的起动矩频特性曲线和工作矩频特性曲线可参阅有关技术手册。
表5-2 反应式步进电动机的性能参数
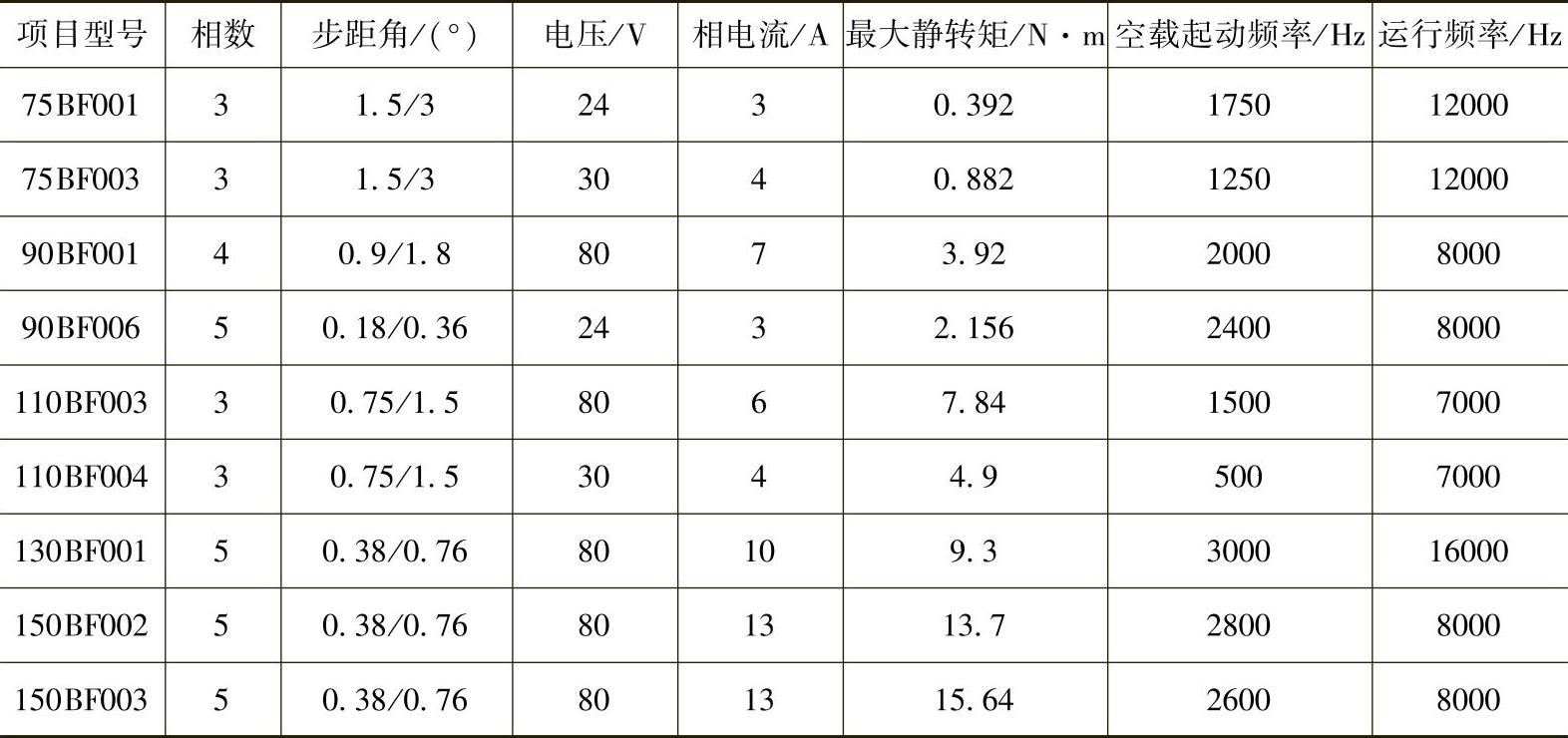
表5-3 混合式步进电动机的性能参数

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。