



1.直线插补计算原理
(1)偏差计算公式 按逐点比较法的原理,每走一步必须把动点(插值点)的实际位置与给定轨迹的理想位置间的误差以“偏差”形式计算出来,然后根据偏差的正、负决定下一步的走向,以逼近给定轨迹。因此,偏差计算是逐点比较法关键的一步。下面以第一象限平面直线为例来推导偏差计算公式。
假定加工如图3-2所示的直线OA。取直线起点为坐标原点,直线终点坐标A(xe,ye)为已知,即直线OA为给定轨迹。m(xm,ym)点为加工点(动点)。若m点在直线OA上,则根据相似三角形的关系可得
xm/ym=xe/ye
即 ymxe-xmye=0
由此,可定义直线插补的偏差判别式如下:
Fm=ymxe-xmye (3-1)
若Fm=0,表示动点在OA直线上,如m;
若Fm>0,表示动点在OA直线上方,如m′;
若Fm<0,表示动点在OA直线下方,如m″。
从图3-2上可以看出,第一象限直线插补,当Fm>0时应向+X的方向进给一步以逼近给定直线,而当Fm<0时应向+Y方向走步以逼近给定直线。当Fm=0时,动点在直线上,为了插补能继续进行,不得不从无偏差状态进给一步,走到有偏差状态。这时可以向+X走,也可向+Y走,这里规定为向+X走一步。
于是我们得到第一象限直线的插补法。即当Fm≥0时向+X进给一步,当Fm<0时向+Y方向进给一步。从起点开始,当两个坐标方向走的步数分别等于xe和ye时停止插补。

图3-2 第一象限直线
因为插补过程中每走完一步都要算一次新的偏差,如果按式(3-1)计算,要做两次乘法及一次减法,还要算新的坐标值,插补速度很慢,因此算法需要简化。
对于第一象限而言,设加工点正处于m点,当Fm≥0时,表明m点在OA直线上或OA直线上方,应沿+X方向进给一步。因坐标值的单位为脉冲当量,走步后新的坐标值为
xm+1=xm+1
ym+1=ym
新点的偏差为
Fm+1=ym+1xe-xm+1ye
=ymxe-(xm+1)ye
=ymxe-xmye-ye
=Fm-ye (3-2)
若Fm<0表明m点在OA的下方,应向+Y方向进给一步,走步后新的坐标值为
xm+1=xm
ym+1=ym+1
新点的偏差为
Fm+1=ym+1xe-xm+1ye
=(ym+1)xe-xmye
=ymxe-xmye+xe(https://www.xing528.com)
=Fm+xe (3-3)
式(3-2)和式(3-3)是简化后的偏差计算公式,公式中只有加减运算,而且不必计算每一点的坐标,只需将前一点的偏差值加上或减去终点坐标xe,ye,即可得到新的坐标点的偏差值。由于加工起点是坐标原点,故起点的偏差是已知的,即Fm=0。这样,随着加工点的前进,每一新加工点的偏差Fm+1,都可由前一点的偏差Fm和终点坐标相加或相减得到,非常简单。
(2)终点判别的方法 一种方法是设置∑x、∑y两个减法计数器,在加工开始前,在∑x、∑y计数器中分别存入终点坐标值xe,ye。X或Y坐标方向每进给一步时,就在相应的计数器中减去1,直到两个计数器中的数都减为零时,停止插补,到达终点。
另一种方法是设置一个终点计数器,计数器中存入X和Y两坐标进给的步数总和∑,∑=xe+ye,当X或Y坐标进给时均在∑中减1,当减到零时,停止插补,到达终点。
第三种方法是选终点坐标值较大的坐标作为计数坐标。如xe≥ye则用xe做终点计数器初值,仅X轴走步时,计数器才减1,计数器减到零到达终点。如ye>xe,则用Y轴计数。
(3)插补计算过程 插补计算一般用子程序来完成。子程序每运行一次,进给一步,控制子程序运行时间间隔,即可控制进给速度。采用定时中断来控制调用插补子程序时间间隔,控制进给速度。
用逐点比较法进行直线插补计算,每走一步,都需要以下四个步骤:
1)偏差判别。这是逻辑运算,即判别偏差Fm≥0或Fm<0,以确定哪个坐标进给和偏差计算方法。
2)坐标进给。根据直线所在象限及偏差符号,决定沿+X、+Y、-X、-Y四个方向中哪个方向进给,为逻辑运算。
3)偏差计算。进给一步后,计算新的加工点的偏差,作为下次偏差判别的依据,为算术运算。
4)终点判别。进给一步后,终点计数器减1,根据计数器的内容是否为0判别是否达到终点,若计数器为0,表示到达终点,则设置插补结束标志后返回。主程序接到插补结束标志,读下一组新的数据到插补工作区,清插补结束标志,重新开始插补。如终点计数器不为零则直接返回,下一次调用时继续插补。
2.直线插补计算举例
【例3-1】设加工第一象限直线,起点为坐标原点,终点坐标xe=6,ye=4,试进行插补计算并画出走步轨迹图。
直线插补计算过程如表3-1所示,表中的终点判别采用了上述的第二种方法,即设置一终点计数器,用来寄存X和Y两个方向的步数和∑,每进给一步∑减1,若∑=0,表示到达终点,停止插补。直线插补走步轨迹如图3-3所示。

图3-3 直线插补走步轨迹
表3-1 直线插补计算过程

3.四个象限的直线插补计算
前面所述的均为第一象限直线的插补方法。第一象限直线插补方法经适当处理后推广到其余象限的直线插补。为适用于四个象限的直线插补,我们在偏差计算时,无论哪个象限直线,都用其坐标的绝对值计算。由此,可得的偏差符号如图3-4所示。当动点位于直线上时偏差F=0,动点不在直线上且偏向Y轴一侧时F>0,偏向X轴一侧时F<0。
由图3-4还可以看到,当F≥0时应沿X轴走步,第一、四象限走+X方向,第三、二象限走-X方向;当F<0时应沿Y轴走一步,第一、二象限走+Y方向,第三、四象限走-Y方向。终点判别也应用终点坐标的绝对值作为计数器初值。
例如,第二象限的直线OA2,其终点坐标为(-xe,ye),在第一象限有一条和它对称于Y轴的直线OA1,其终点坐标为(xe,ye)。当从O点开始出发,按第一象限直线OA1进行插补时,若把沿X轴正向进给改为沿X轴负向进给,这时实际插补出的就是第二象限的直线OA2,而其偏差计算公式与第一象限直线的偏差计算公式相同。同理,插补第三象限终点为(-xe,-ye)的直线OA3,它与第一象限终点为(xe,ye)的直线OA1是对称于原点的,所以依然按第一象限直线OA1插补,只需在进给时将+X进给改为-X进给,+Y进给改为-Y进给即可。
四个象限直线插补的偏差计算公式及进给方向列于表3-2之中。表中L1、L2、L3、L4分别表示第一、二、三、四象限的直线。
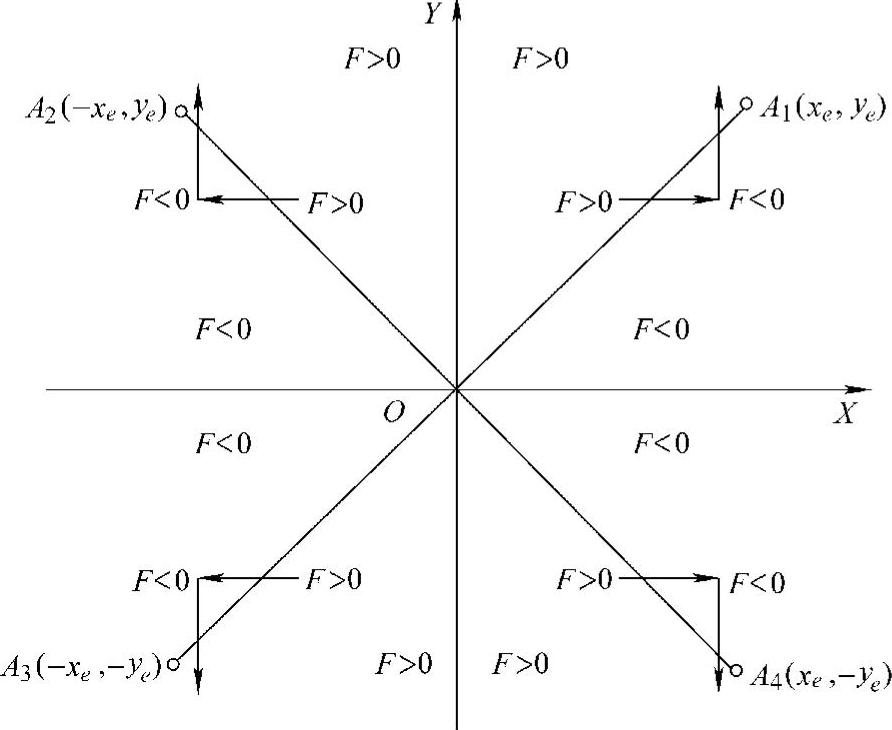
图3-4 四象限直线偏差符号和进给方向
表3-2 直线插补的偏差计算公式及进给方向

4.直线插补计算的程序实现
程序设计首先要明确设计要求,再根据程序要完成的任务划分模块,设计算法及流程图,分配资源,最后进行程序编制。直线插补只是数控系统软件的一个模块,在设计流程图之前,还需确定与其他模块的关系。因为某一象限直线在各轴进给方向是确定的,并且在此直线的插补过程中不变,如L2为-X或+Y,L3为-X或-Y。所以,这里插补程序不处理进给方向问题。进给方向由数据处理程序以标志的形式直接传递给进给驱动子程序。开环系统中,进给驱动子程序的功能主要是根据插补结果和进给方向标志,驱动步进电动机运动。直线插补流程图和进给驱动子程序流程图略。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。