



1.控制要求
采用PLC控制伺服驱动器来驱动伺服电动机运转,通过与电动机同轴的丝杆带动工作台移动,如图7-20所示,具体要求如下:
1)按下起动按钮,伺服电动机通过丝杆驱动工作台从A位置(起始位置)向右移动,当移动30mm后停止2s,然后向左返回,当到达A位置后,工作台停止2s,又向右运动,如此反复。
2)在工作台移动时,按下停止按钮,工作台运行完一周后返回到A点并停止移动。
3)要求工作台移动速度为10mm/s,已知丝杆的螺距为5mm。
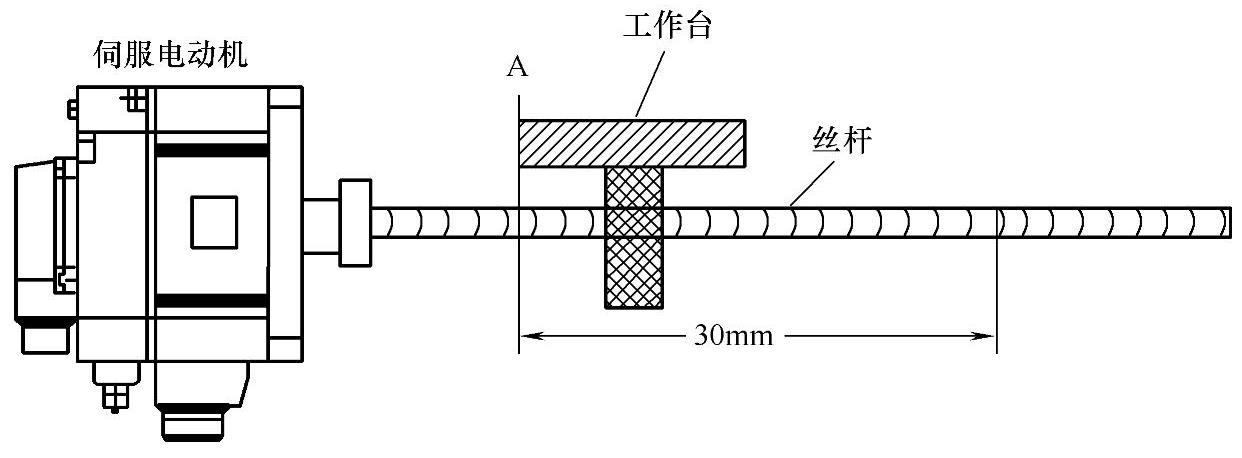
图7-20 工作台往返定位运行示意图
2.控制电路
工作台往返定位运行的伺服电动机控制电路如图7-21所示。(https://www.xing528.com)
电路工作过程说明如下:
(1)电路的工作准备
220V的单相交流电源经开关NFB送到伺服驱动器的L11、L21端,伺服驱动器内部的控制电路开始工作,ALM端内部变为ON,VDD端输出电流经继电器RA线圈进入ALM端,RA线圈得电,电磁制动器外接RA触头闭合,制动器线圈得电而使抱闸松开,停止对伺服电动机刹车,同时附属电路中的RA触头也闭合,接触器MC线圈得电,MC主触头闭合,220V电源送到伺服驱动器的L1、L2端,为内部的主电路供电。

图7-21 工作台往返定位运行的伺服电动机控制电路
(2)往返定位运行控制
按下起动按钮SB1,PLC的Y001端输出为ON(Y001端子内部晶体管导通),伺服驱动器NP端输入为低电平,确定伺服电动机正向旋转,与此同时,PLC的Y000端输出一定数量的脉冲信号进入伺服驱动器的PP端,确定伺服电动机旋转的转数。在NP、PP端输入信号控制下,伺服驱动器驱动伺服电动机正向旋转一定的转数,通过丝杆带动工作台从起始位置向右移动30mm,然后Y000端子停止输出脉冲,伺服电动机停转,工作台停止,2s后,Y001端输出为OFF(Y001端子内部晶体管截止),伺服驱动器NP端输入为高电平,同时Y000端又输出一定数量的脉冲到PP端,伺服驱动器驱动伺服电动机反向旋转一定的转数,通过丝杆带动工作台向左移动30mm返回起始位置,停止2s后又重复上述过程,从而使工作台在起始位置至右方30mm之间往返运行。
在工作台往返运行过程中,若按下停止按钮SB2,PLC的Y000、Y001端并不会马上停止输出,而是必须等到Y001端输出为OFF,Y000端的脉冲输出完毕,这样才能确保工作台停在起始位置。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。