



人眼对角点的识别通常是在一个局部的小区域或小窗口完成的,如图4-9a所示。如果在各个方向上,移动这个特定的小窗口,窗口内区域的灰度发生了较大的变化,那么,就认为在窗口内遇到了角点,如图4-9b所示;如果这个特定的窗口在图像各个方向上移动时,窗口内图像的灰度没有发生变化,那么窗口内就不存在角点,如图4-9c所示;如果窗口在某一个(些)方向移动时,窗口内图像的灰度发生了较大的变化,而在另一些方向上没有发生变化,那么,窗口内的图像可能就是一条直线的线段,如图4-9d所示。
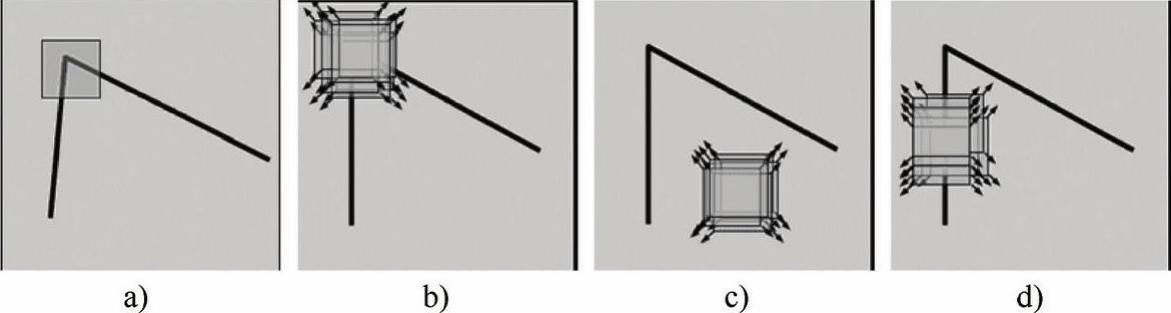
图4-9 窗口、窗口的移动与角点检测
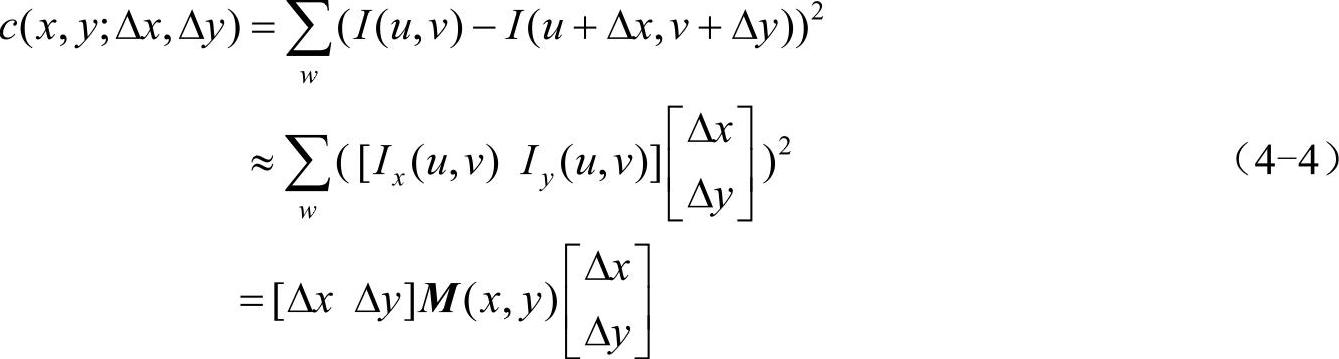
对于图像I(x,y),当在点(x,y)处平移(Δx,Δy)后的自相似性可以通过自相关函数给出:

式中,W(x,y)是以点(x,y)为中心的窗口,w(u,v)为加权函数,它既可以是常数,又可以是高斯加权函数,如图4-10所示。

图4-10 加权函数
a)常数加权函数 b)高斯加权函数
根据泰勒展开,对图像I(x,y)在平移(Δx,Δy)后进行一阶近似:

式中,Ix、Iy是图像I(x,y)的偏导数。这样,(4-2)可以近似为:
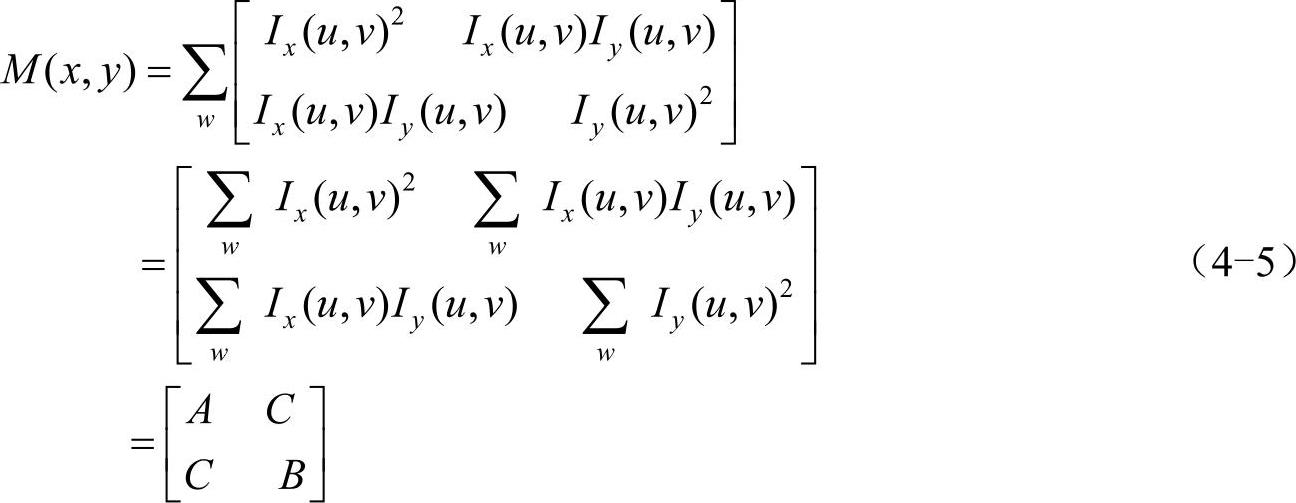
其中
也就是说图像I(x,y)在点(x,y)处平移(Δx,Δy)后的自相关函数可以近似为二次项函数:(https://www.xing528.com)

二次项函数本质上是一个椭圆函数,二次项特征值与椭圆变化的关系如图4-11所示。椭圆的扁率和尺寸是由M(x,y)的特征值λ1、λ2决定的,椭圆的方向是由M(x,y)的特征矢量决定的,椭圆的方程式为:

二次项函数的特征值与图像中的角点、直线(边缘)和平面之间的关系如图4-12所示。可分为三种情况:
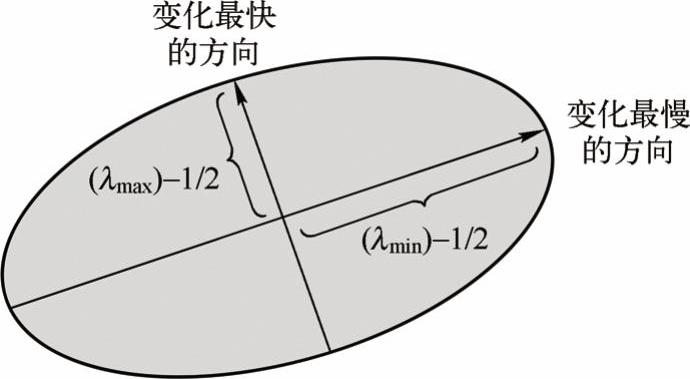
图4-11 二次项特征值与椭圆变化的关系
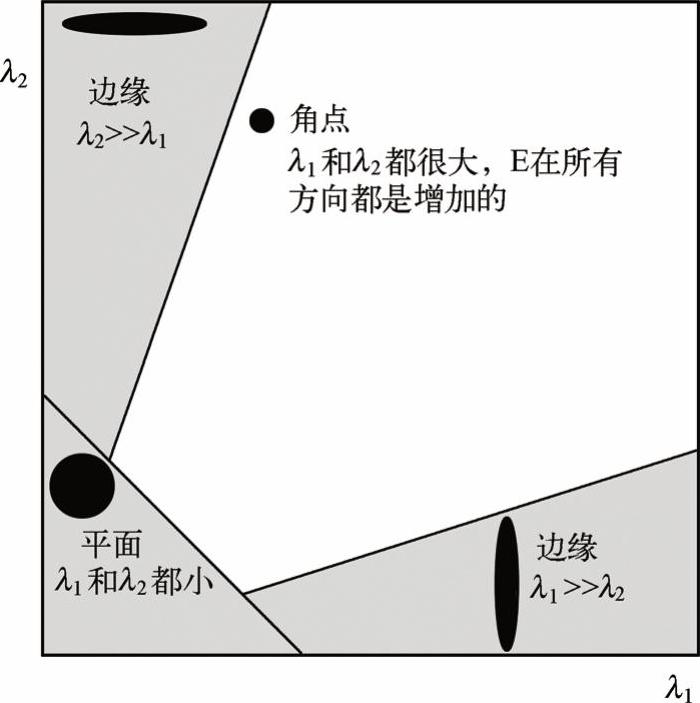
图4-12 特征值与图像中点线面之间的关系
➢图像中的直线。一个特征值大,另一个特征值小,即λ1□λ2或λ1□λ2。自相关函数值在某一方向上大,在其他方向上小。
➢图像中的平面。两个特征值都小,且近似相等;自相关函数值在各个方向上都小。
➢图像中的角点。两个特征值都大,且近似相等,自相关函数在所有方向上都增大。
根据二次项函数特征值的计算方法,可以求式(4-5)的特征值。但是Harris给出的角点判别方法并不需要计算具体的特征值,而是计算一个角点响应值R来判断角点。R的计算公式为
R=detM-α(traceM)2 (4-8)
式中,detM为矩阵 的行列式;traceM为矩阵M的直迹;α为经验常数,取值范围0.04~0.06。实事上,特征值是隐含在detM和traceM中,因为:
的行列式;traceM为矩阵M的直迹;α为经验常数,取值范围0.04~0.06。实事上,特征值是隐含在detM和traceM中,因为:

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。