



SUSAN又称最小核值相似区,是Smallest Univalue Segment Assimilating Nucleus的缩写,是由牛津大学的Smith等人提出的。SUSAN使用一个原型模板和一个圆的中心点,通过圆中心点像元值与模板圆内其他像元值的比较,统计出与圆中心点像元值近似的像元数量,并与所设定的阈值进行比较,以确定是否是边缘。
定义一个半径为3.4个像元的圆,对于离散图像而言,这个圆共有37个像元。圆的中心像元称为模板的核(Nucleus),如图4-6所示,粗线包围的区域为离散圆。
在模板圆内,将与模板核像元值相似的像元数量或面积称为核值相似区(Univalue Segment Assimilating Nuceleus,USAN)面积,如图4-7所示,当模板圆在典型图像上移动时,在圆内,USAN面积是完全不同的。当圆形模板完全处在图像或背景中时,USAN区域面积最大;当模板移向图像边缘时,USAN区域逐渐变小;当模板中心处于边缘时,USAN区域很小;当模板中心处于角点时,USAN区域最小。可以看出,在边缘处像素的USAN值都小于或等于其最大值的1/2。因此,计算图像中每一个像素的USAN值,通过设定一个USAN阀值,查找小于阀值的像素点,即可确定为边缘点。

图4-6 SUSAN模板离散圆与核
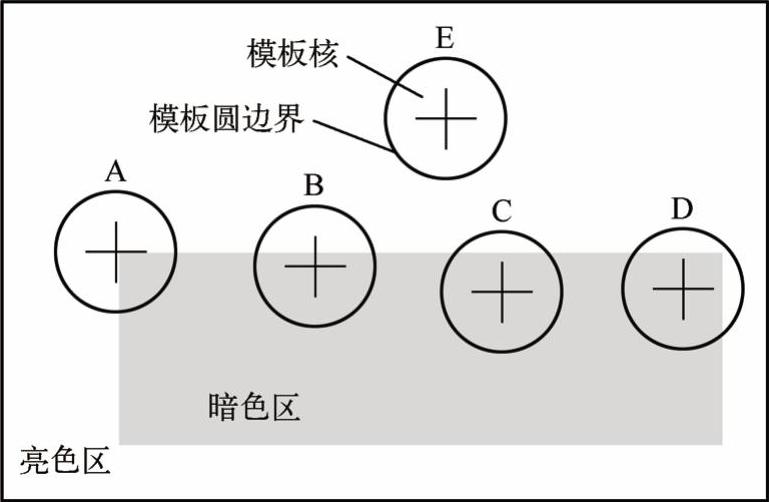
图4-7 模型和模板核在典型图像的不同位置的USAN变化
将圆形模板在被检测的图像上逐个像元移动,圆形模板内的像元值与核像元值进行比较。比较过程可用下式进行描述。
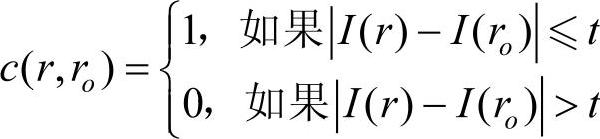
其中,ro表示模板核在二维图像中的位置;r表示模板内其他任意位置;I(ro)表示图像在ro处的像元值;I(r)表示图像在r处的像元值;t为像元与其他像元相似度的阈值。当模板圆内的所有像元比较完成后,对结果c(r,ro)进行累加,即
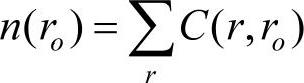
n(ro)就是模板核在ro处模板内图像USAN的像元数量,也即是模板核在ro处图像USAN的面积。
得到每个像素的USAN值n(ro)以后,再与预先设定得门限g进行比较,当n(r0)<g时,所检测到像素位置ro可以认为是一个边缘点。
对于数字图像,实际上无法实现真正的圆形模板,所以都是采用近似圆代替。但当模板较小时,如果门限选取不恰当,可能会发生边缘点漏检的情况。模板也不宜取得太大,否则会增大运算量大,通常可取5×5或37像素模板。
门限g决定了边缘点的USAN区域的最大值,即只要图像中的像素的USAN值小于g,该点就被判定为边缘点。g过大时,边缘点附近的像素可能作为边缘被提取出来,过小则会漏检部分边缘点。g取0.75×nmax时(nmax为模板的最大USAN值)可以较好地提取出图像中的边缘点。
门限t表示所能检测边缘点的最小对比度,也是能忽略的噪声的最大容限。t越小,可从对比度越低的图像中提取特征。因此对于不同对比度和噪声情况的图像,应取不同的t值。
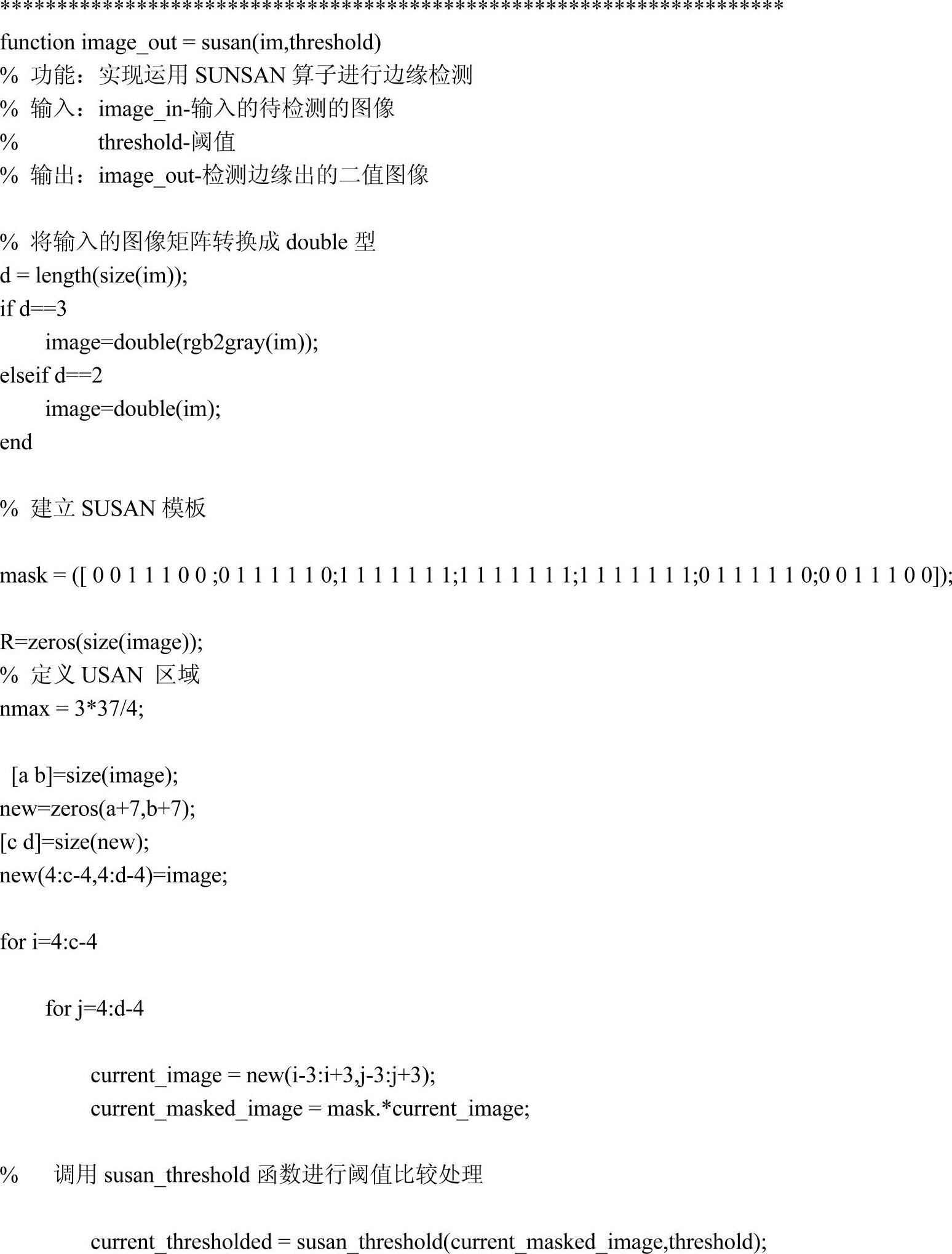
例程4-4的功能是实现运用SUNSAN算子进行边缘检测。
例程4-4
 (https://www.xing528.com)
(https://www.xing528.com)
例程4-5所调用的子函数susan_threshold的MATLAB源代码如下所示。
例程4-5
例程4-4和例程4-5的运行结果如图4-8所示。

图4-8 例程4-4、4-5的运行结果
a)原始图像 b)采用SUSAN算子检测边缘的结果
基于SUSAN算子的边缘检测有如下优良性能。
(1)抗噪声能力好
由于USAN的求和相当于求积分,所以这种算法对噪声不敏感,而且SUSAN算法不涉及梯度的计算,所以该算法抗噪声的性能很好。很明显,如果考虑有独立同分布的高斯噪声,只要噪声小于USAN函数的相似灰度门限值,噪声就可被忽略。对局部突变的孤立噪声,即使噪声的灰度与核相似,只要局部USAN值小于门限g,也不会对边缘检测造成影响。因此SUSAN边缘检测算法可以用于被噪声污染的图像的边缘检测。
(2)算法使用灵活
由于基于SUSAN算法的边缘检测使用了控制参数t和g,因而,可以根据具体情况很容易地对不同对比度、不同形状的图像通过设置恰当的t和g来进行控制。例如,图像的对比度较大,则可选取较大的t值;而图像的对比度较小,则可选取较小的t值。所以这种算法非常适用于对某些低对比度图像或目标的识别。
(3)运算量小,速度快
对一幅256×256的图像,应用SUSAN算法进行计算,对每一点只需做8次加法运算,共需要做256×256×8次加法。而对于其他的经典的边缘检测算法,如果采用欧式距离作为梯度算子,Sobel算子采用两个3×3的模板,对每一点需要做9次加法,6次乘法,以及1次开方运算,则共需要做256×256×9次加法运算和256×256×6次乘法运算,以及256×256次开方运算。采用Gauss-Laplace算子、Priwitt算子以及Canny算子进行边缘检测的计算量就会更大。
(4)可以检测边缘的方向信息
SUSAN算法可以检测出边缘的方向信息。具体思想是:对每一个检测点计算模板内与该点灰度相似的像素集合的重心,检测点与该重心的连线的矢量垂直于这条边缘。
经验分享:傅里叶变换与梯度的关系
图像是由对在连续空间上的采样得到一系列点的集合,用户习惯用一个二维矩阵表示空间上各点,则图像可由z=f(x,y)来表示。由于空间是三维的,图像是二维的,因此,空间中物体在另一个维度上的关系就由梯度来表示,这样就可以通过观察图像得知物体在三维空间中的对应关系。为什么要提梯度呢?因为实际上对图像进行二维傅里叶变换得到频谱图,就是图像梯度的分布图,当然频谱图上的各点与图像上各点并不存在一一对应的关系,即使在不移频的情况下也一样。在傅里叶频谱图上看到的明暗不一的亮点,实际上是图像上某一点与邻域点差异的强弱,即梯度的大小,也即该点频率的大小(可以这么理解,图像中的低频部分指低梯度的点,高频部分相反)。一般来讲,梯度大则该点的亮度强,否则该点亮度弱。这样通过观察傅里叶变换后的频谱图,也叫功率图。首先就可以看出图像的能量分布:如果频谱图中暗的点数更多,那么实际图像是比较柔和的(因为各点与邻域差异都不大,梯度相对较小);反之,如果频谱图中亮的点数多,那么实际图像一定是尖锐的,边界分明且边界两边像素差异较大。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。