



当完成模型动力学参数的设置后,就可以仿真求解题设问题。
 仿真参数设置及计算
仿真参数设置及计算
 单击MotionManager工具栏中的“选项”
单击MotionManager工具栏中的“选项” 图标按钮,系统弹出如图11-36所示的“运动算例属性”属性管理器。对挖掘机进行仿真求解的设置。
图标按钮,系统弹出如图11-36所示的“运动算例属性”属性管理器。对挖掘机进行仿真求解的设置。
 在“Motion”栏内输入“每秒帧数”为50,其余参数采用默认的设置。参数设置完成后的“运动算例属性”属性管理器如图11-37所示。
在“Motion”栏内输入“每秒帧数”为50,其余参数采用默认的设置。参数设置完成后的“运动算例属性”属性管理器如图11-37所示。
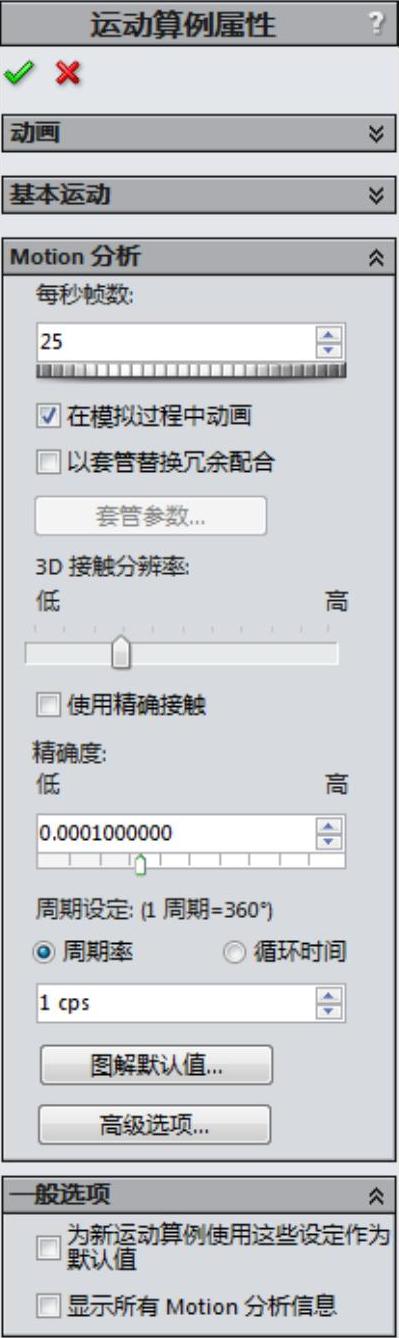
图11-36 参数设置
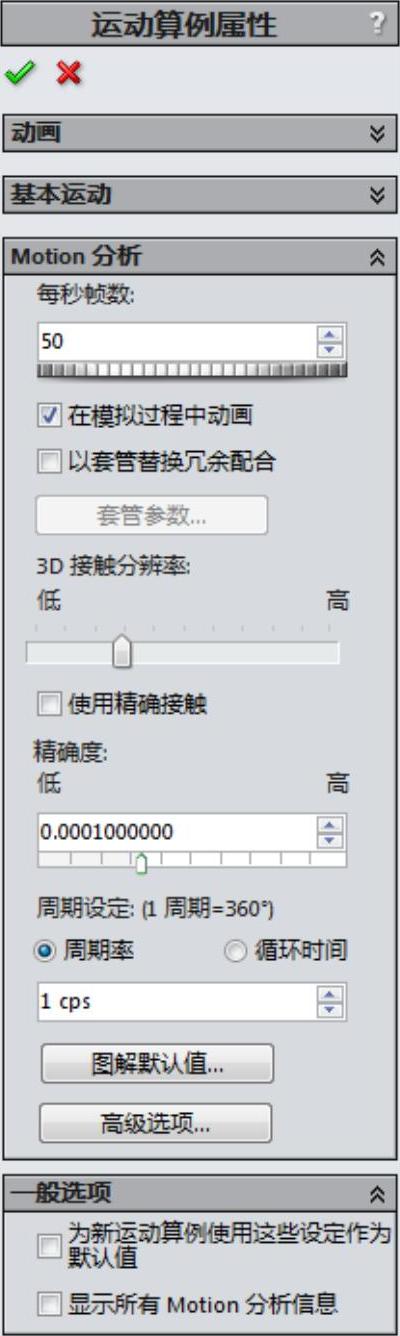
图11-37 “运动算例属性”属性管理器
 在MotionManager界面将时间栏的长度拉到7秒,如图11-38所示。
在MotionManager界面将时间栏的长度拉到7秒,如图11-38所示。
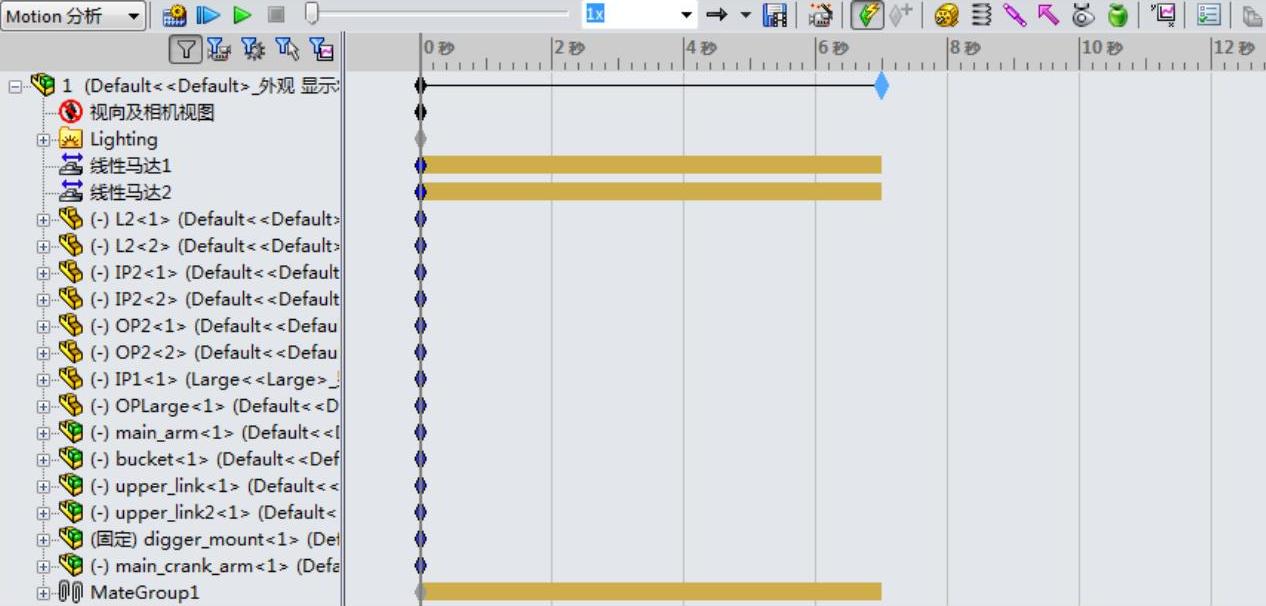
图11-38 MotionManager界面
 单击MotionManager工具栏中的“计算”
单击MotionManager工具栏中的“计算” 图标按钮,对挖掘机进行仿真求解的计算。
图标按钮,对挖掘机进行仿真求解的计算。
通过观察,读者不难发现,挖掘机具有明显不同的运动状态。铲斗运动描述如下:铲斗首先缓慢运动(意思是正在铲东西),然后铲斗抬高并旋转,为的是确保材料在铲斗中保持;而后抬到最高的高度,倾倒铲斗的材料;最后回到铲斗的初始位置。这样铲斗就完成了整个的铲土—保持—倾倒—回位的运动过程。(https://www.xing528.com)
 添加结果曲线
添加结果曲线
分析计算完成后可以对分析的结果进行后处理,分析计算的结果和进行图解。
 单击MotionManager工具栏中的“结果和图解”
单击MotionManager工具栏中的“结果和图解” 图标按钮,系统弹出如图11-39所示的“结果”属性管理器。对挖掘机进行仿真结果的分析。
图标按钮,系统弹出如图11-39所示的“结果”属性管理器。对挖掘机进行仿真结果的分析。
 单击“结果”栏内的“选取类别”下拉框,选择分析的类别为“力”,单击“选取子类别”下拉框,选择分析的子类别为“反作用力”,单击“选取结果分量”下拉框,选择分析的结果分量为“幅值”。
单击“结果”栏内的“选取类别”下拉框,选择分析的类别为“力”,单击“选取子类别”下拉框,选择分析的子类别为“反作用力”,单击“选取结果分量”下拉框,选择分析的结果分量为“幅值”。
 首先单击“面”图标
首先单击“面”图标 右侧的显示栏,然后在装配体模型树中单击IP2与main_arm的同心配合Concentric55,如图11-40所示。
右侧的显示栏,然后在装配体模型树中单击IP2与main_arm的同心配合Concentric55,如图11-40所示。
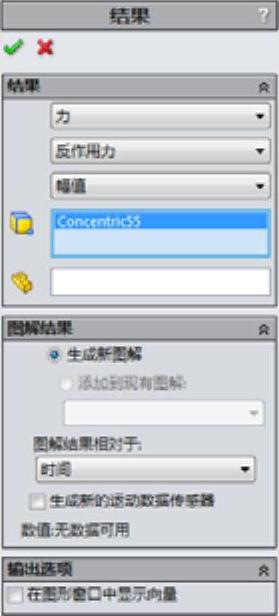
图11-39 “结果”属性管理器
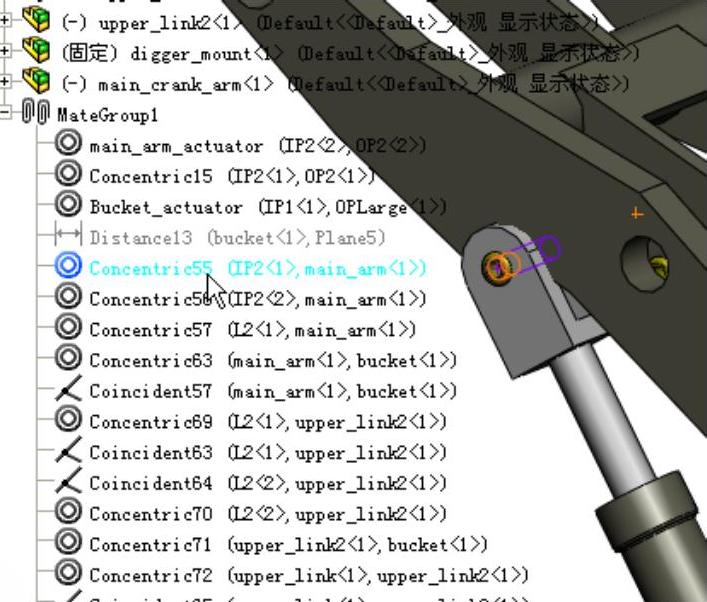
图11-40 选择同心配合
 单击“确认”按钮
单击“确认”按钮 ,生成新的图解,如图11-41所示。
,生成新的图解,如图11-41所示。
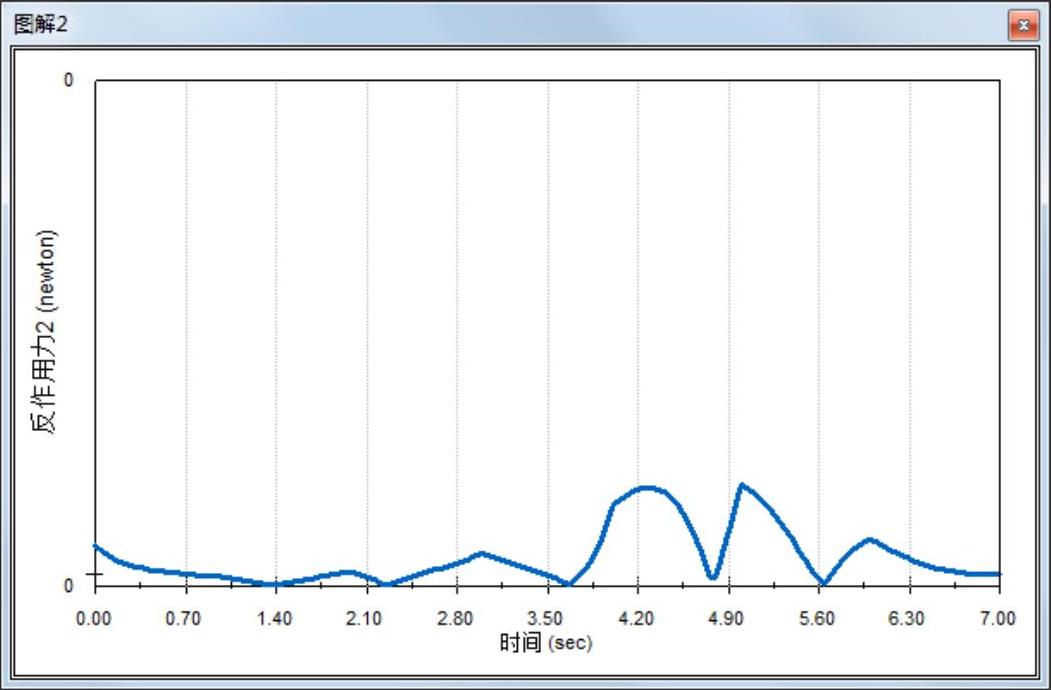
图11-41 反作用力-时间曲线
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。