



加载装配体模型
 加载装配体文件,“Plot_functions_exercise_start.SLDASM”。该文件位于“挖土机运动机构”文件夹。
加载装配体文件,“Plot_functions_exercise_start.SLDASM”。该文件位于“挖土机运动机构”文件夹。
 单击绘图区下部的“运动算例1”标签,切换到运动算例界面。
单击绘图区下部的“运动算例1”标签,切换到运动算例界面。
 单击MotionManager工具栏中的“马达”
单击MotionManager工具栏中的“马达” 图标按钮,系统弹出“马达”属性管理器。
图标按钮,系统弹出“马达”属性管理器。
 在“马达”属性管理器的“马达类型”中,单击“线性马达”
在“马达”属性管理器的“马达类型”中,单击“线性马达” 图标,为挖掘机添加线性类型的马达1。
图标,为挖掘机添加线性类型的马达1。
 首先单击“马达位置”图标
首先单击“马达位置”图标 右侧的显示栏,然后在绘图区单击IP2的外圆,如图11-31所示,为添加的马达位置。
右侧的显示栏,然后在绘图区单击IP2的外圆,如图11-31所示,为添加的马达位置。
 在“运动”栏内选择“马达类型”为“数据点”,在弹出的“函数编制程序”窗口中选择“值”为“位移”,依照表11-1输入时间和位移参数,选择插值类型为“立方样条曲线”。单击“马达”属性管理器中的图标,得到图表的放大图如图11-32所示。
在“运动”栏内选择“马达类型”为“数据点”,在弹出的“函数编制程序”窗口中选择“值”为“位移”,依照表11-1输入时间和位移参数,选择插值类型为“立方样条曲线”。单击“马达”属性管理器中的图标,得到图表的放大图如图11-32所示。
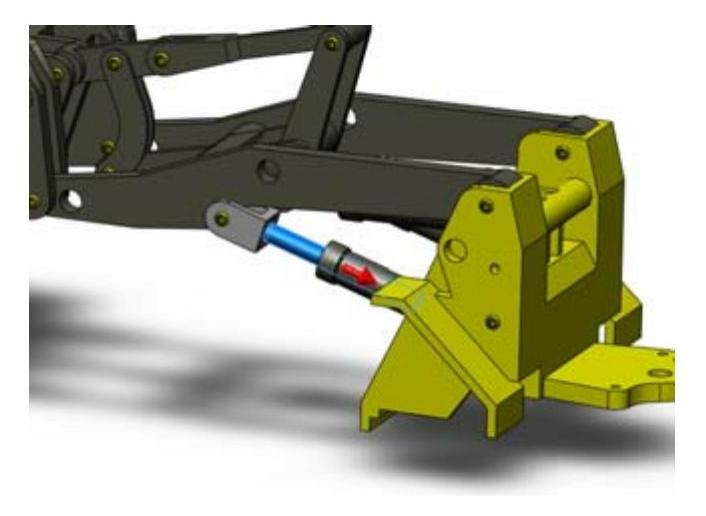
图11-31 添加马达位置
表11-1 IP2时间-位移参数

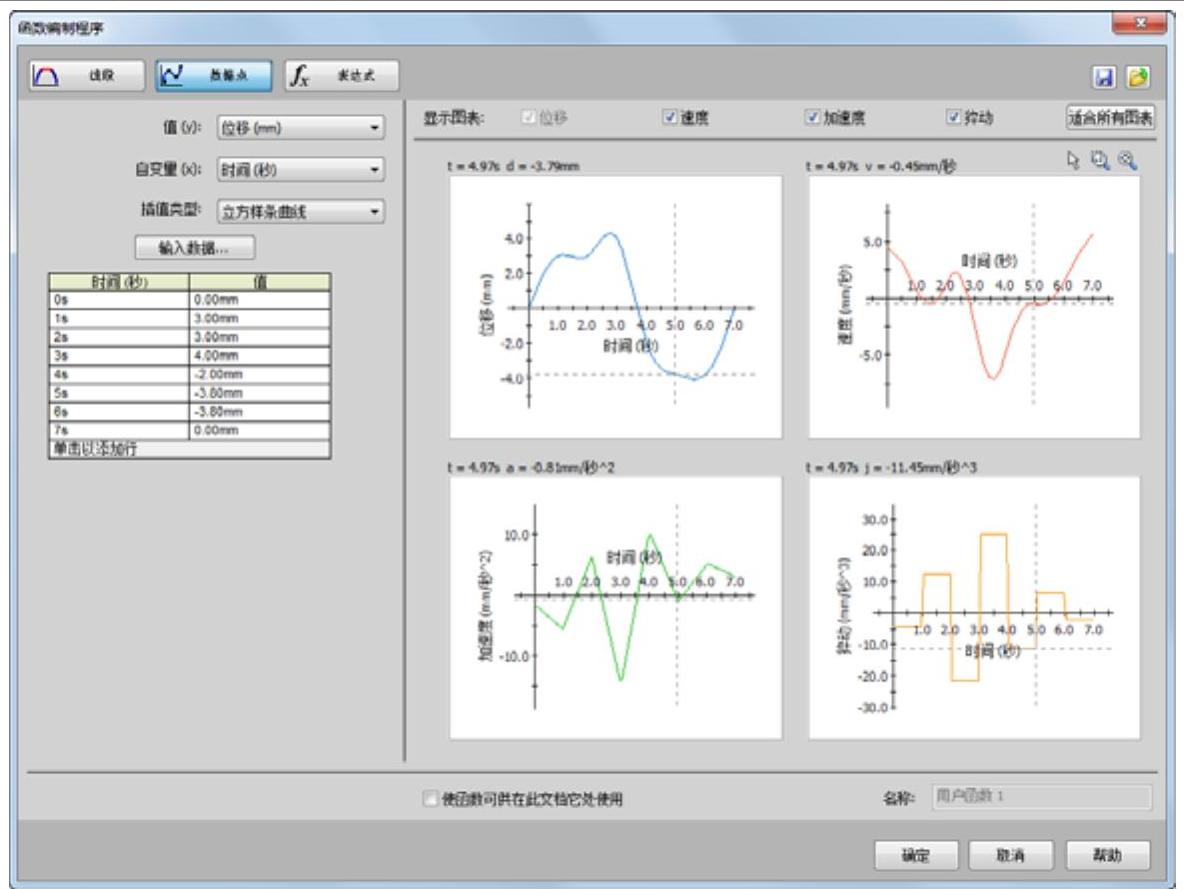
图11-32 时间-位移参数图表
 参数设置完成后的“马达”属性管理器如图11-33所示。单击“确认”按钮
参数设置完成后的“马达”属性管理器如图11-33所示。单击“确认”按钮 ,生成新的马达1。(https://www.xing528.com)
,生成新的马达1。(https://www.xing528.com)
 单击MotionManager工具栏中“马达”
单击MotionManager工具栏中“马达” 图标按钮,系统弹出“马达”属性管理器。
图标按钮,系统弹出“马达”属性管理器。
 在“马达”属性管理器的“马达类型”中,单击“线性马达”
在“马达”属性管理器的“马达类型”中,单击“线性马达” 图标,为挖掘机添加线性类型的马达2。
图标,为挖掘机添加线性类型的马达2。
 首先单击“马达位置”图标
首先单击“马达位置”图标 右侧的显示栏,然后在绘图区单击IP1的外圆,如图11-34所示,为添加的马达位置。
右侧的显示栏,然后在绘图区单击IP1的外圆,如图11-34所示,为添加的马达位置。
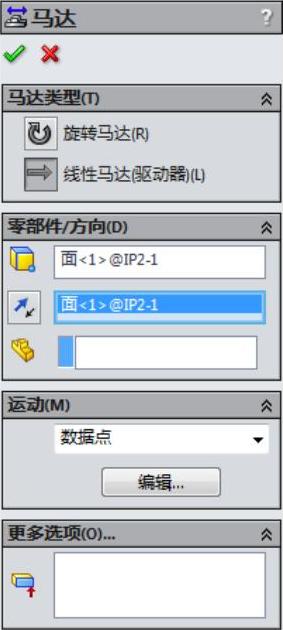
图11-33 参数设置
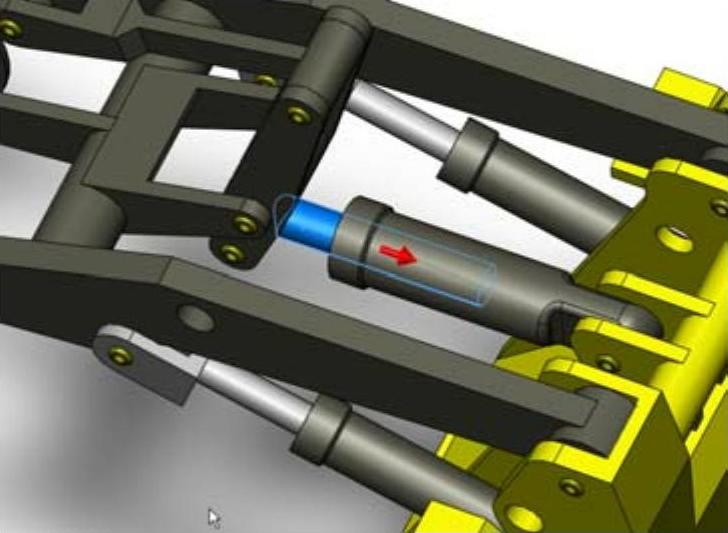
图11-34 添加马达位置
 在“运动”栏内选择“马达类型”为“数据点”,在弹出的“函数编制程序”窗口中选择“值”为“位移”,依照表11-2输入时间和位移参数,选择插值类型为“立方样条曲线”。单击“马达”属性管理器中的图标,得到图表的放大图如图11-35所示。
在“运动”栏内选择“马达类型”为“数据点”,在弹出的“函数编制程序”窗口中选择“值”为“位移”,依照表11-2输入时间和位移参数,选择插值类型为“立方样条曲线”。单击“马达”属性管理器中的图标,得到图表的放大图如图11-35所示。
 参数设置完成后的“马达”属性管理器如图11-33所示。单击“确认”按钮
参数设置完成后的“马达”属性管理器如图11-33所示。单击“确认”按钮 ,生成新的马达2。
,生成新的马达2。
表11-2 IP1时间-位移参数

图11-35 时间-位移参数图表
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。