



 添加马达
添加马达
 单击MotionManager工具栏中的“马达”
单击MotionManager工具栏中的“马达” 图标按钮,系统弹出如图10-12所示的“马达”属性管理器。
图标按钮,系统弹出如图10-12所示的“马达”属性管理器。
 在“马达”属性管理器的“马达类型”中,单击“旋转马达”
在“马达”属性管理器的“马达类型”中,单击“旋转马达” 图标,为曲柄滑块机构添加旋转类型的马达。
图标,为曲柄滑块机构添加旋转类型的马达。
 首先单击“马达位置”图标
首先单击“马达位置”图标 右侧的显示栏,然后在绘图区单击曲柄下部的圆孔,如图10-13所示,为添加的马达位置。
右侧的显示栏,然后在绘图区单击曲柄下部的圆孔,如图10-13所示,为添加的马达位置。
 马达的方向采用默认的逆时针方向。
马达的方向采用默认的逆时针方向。
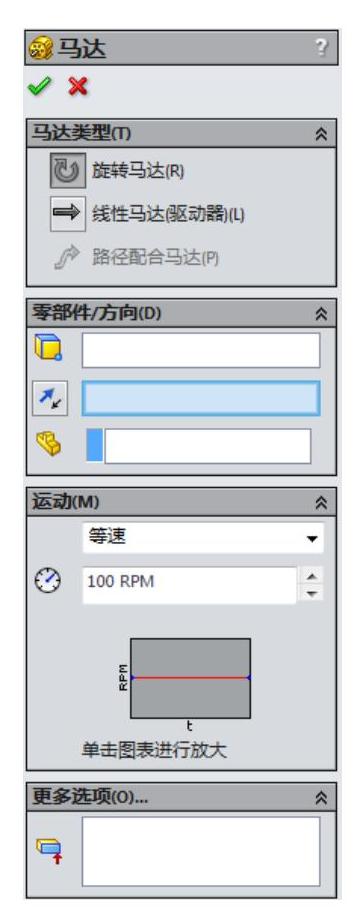
图10-12 “马达”属性管理器

图10-13 添加马达位置
 在“运动”栏内选择“马达类型”为“等速”,马达的转数为10RPM。参数设置完成后的“马达”属性管理器如图10-14所示。
在“运动”栏内选择“马达类型”为“等速”,马达的转数为10RPM。参数设置完成后的“马达”属性管理器如图10-14所示。
 单击“确认”按钮
单击“确认”按钮 ,生成新的马达。
,生成新的马达。
 添加弹簧
添加弹簧
 单击MotionManager工具栏中的“弹簧”
单击MotionManager工具栏中的“弹簧” 图标按钮,系统弹出如图10-15所示的“弹簧”属性管理器。
图标按钮,系统弹出如图10-15所示的“弹簧”属性管理器。
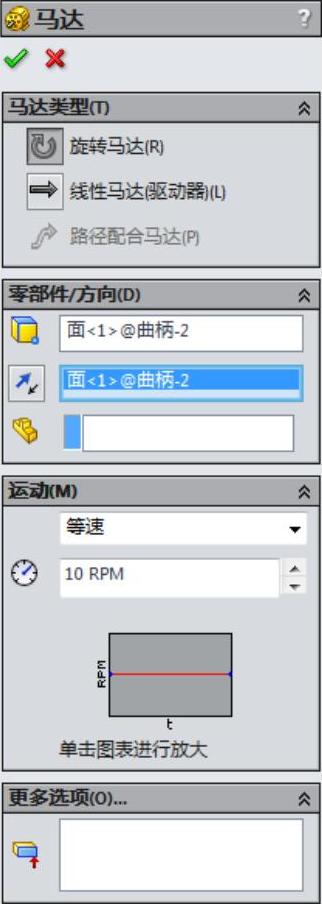
图10-14 参数设置

图10-15 “弹簧”属性管理器
 在“弹簧”属性管理器的“弹簧类型”中,单击“线性弹簧”
在“弹簧”属性管理器的“弹簧类型”中,单击“线性弹簧” 图标,为曲柄滑块机构添加线性弹簧。
图标,为曲柄滑块机构添加线性弹簧。
 首先单击“弹簧端点”图标
首先单击“弹簧端点”图标 右侧的显示栏,然后在绘图区分别单击滑块的右端部和导轨机架竖直面的左端部,如图10-16所示,为添加的弹簧位置。
右侧的显示栏,然后在绘图区分别单击滑块的右端部和导轨机架竖直面的左端部,如图10-16所示,为添加的弹簧位置。

图10-16 添加弹簧位置(https://www.xing528.com)
 在“弹簧参数”栏内输入“弹簧常数”为0.10牛顿/mm,弹簧的“自由长度”为80.00mm。
在“弹簧参数”栏内输入“弹簧常数”为0.10牛顿/mm,弹簧的“自由长度”为80.00mm。
 单击“阻尼”栏上的复选框并打开“阻尼”栏。输入“阻尼常数”为0.50牛顿/(mm/秒)。
单击“阻尼”栏上的复选框并打开“阻尼”栏。输入“阻尼常数”为0.50牛顿/(mm/秒)。
 “显示”栏采用系统默认的参数(对显示栏修改不影响系统分析的结果),参数设置完成后的“弹簧”属性管理器如图10-17所示。
“显示”栏采用系统默认的参数(对显示栏修改不影响系统分析的结果),参数设置完成后的“弹簧”属性管理器如图10-17所示。
 单击“确认”按钮
单击“确认”按钮 ,生成新的弹簧。
,生成新的弹簧。
 添加实体接触
添加实体接触
 单击MotionManager工具栏中的“接触”
单击MotionManager工具栏中的“接触” 图标按钮,系统弹出如图10-18所示的“接触”属性管理器。
图标按钮,系统弹出如图10-18所示的“接触”属性管理器。
 首先单击“零部件”图标
首先单击“零部件”图标 右侧的显示栏,然后在绘图区选择滑块和导轨机架,如图10-19所示,为选择的两个零件。
右侧的显示栏,然后在绘图区选择滑块和导轨机架,如图10-19所示,为选择的两个零件。

图10-17 参数设置
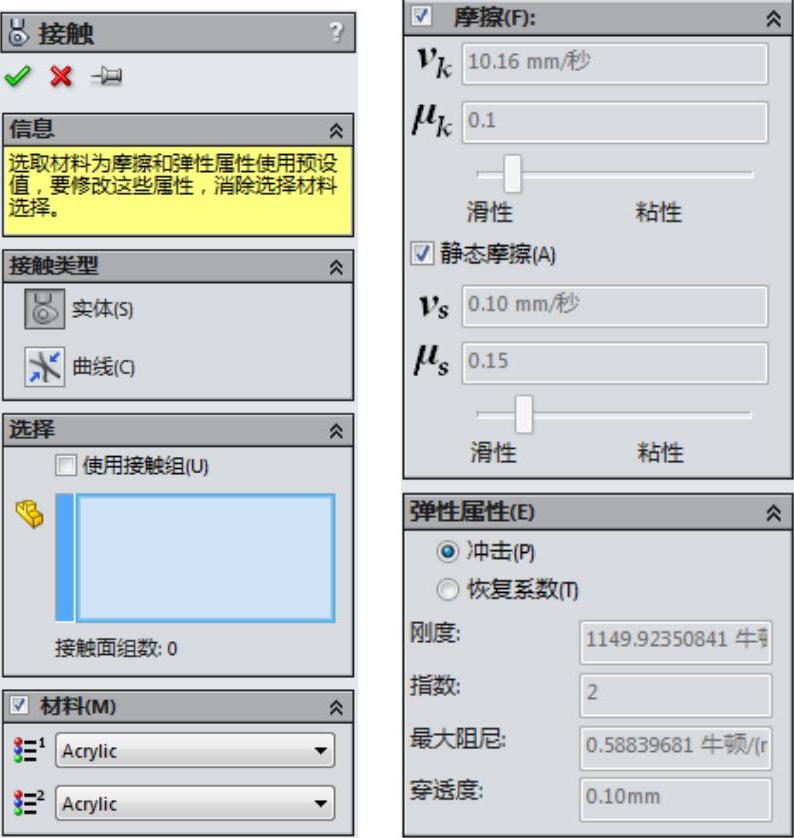
图10-18 “接触”属性管理器
 取消“材料”栏的复选框,本例采用输入摩擦因数的方式。
取消“材料”栏的复选框,本例采用输入摩擦因数的方式。
 在“摩擦”栏内输入“动态摩擦”因数为0.15,其余参数采用默认的设置。参数设置完成后的“摩擦”属性管理器如图10-20所示。
在“摩擦”栏内输入“动态摩擦”因数为0.15,其余参数采用默认的设置。参数设置完成后的“摩擦”属性管理器如图10-20所示。
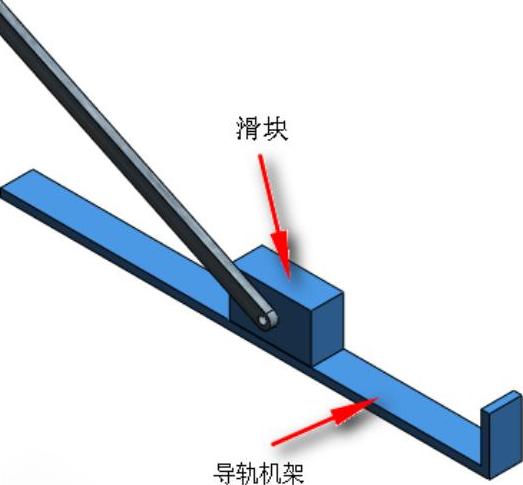
图10-19 添加马达位置

图10-20 参数设置
 单击“确认”按钮
单击“确认”按钮 ,生成新的接触关系。
,生成新的接触关系。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。