



参见光盘
光盘\视频教学\第6章\制动器装配体动画.avi
 基于旋转马达动画
基于旋转马达动画
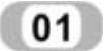
 打开创建的制动器装配体,如图6-43所示。
打开创建的制动器装配体,如图6-43所示。
 单击MotionManager工具栏上的“马达”
单击MotionManager工具栏上的“马达” 图标按钮,打开“马达”属性管理器。
图标按钮,打开“马达”属性管理器。
 在属性管理器“马达类型”一栏中选择“旋转马达”,在视图中选择臂表面,属性管理器和旋转方向,如图6-44所示。
在属性管理器“马达类型”一栏中选择“旋转马达”,在视图中选择臂表面,属性管理器和旋转方向,如图6-44所示。
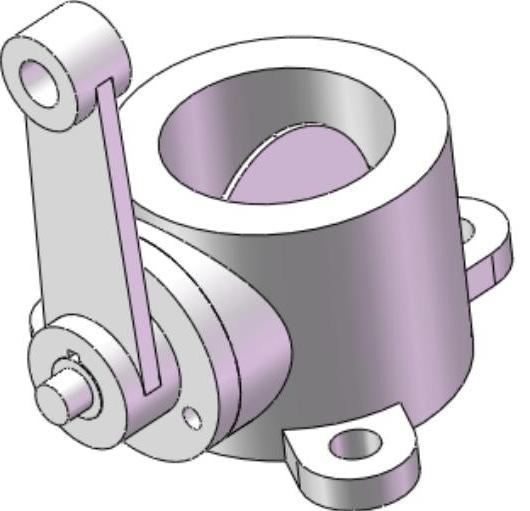
图6-43 制动器装配体
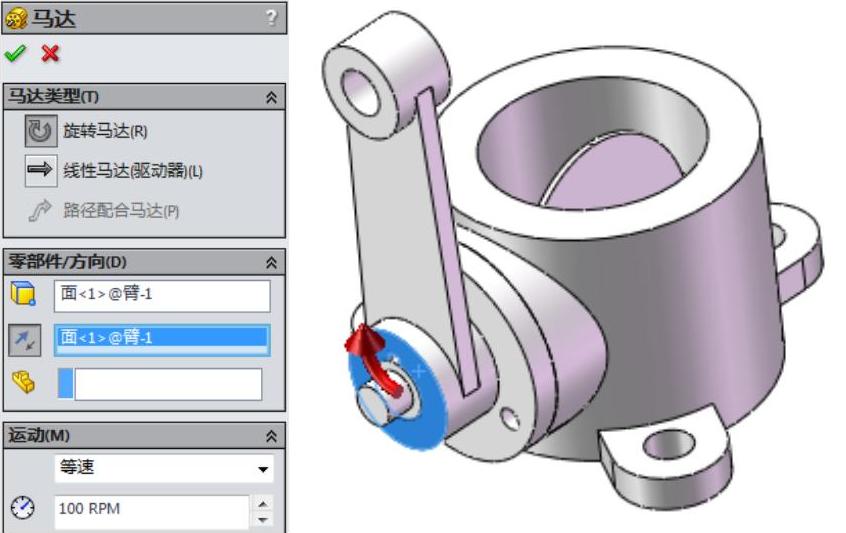
图6-44 选择旋转方向
 在属性管理器中选择“等速”运动,速度设为100,单击属性管理器中的“确定”
在属性管理器中选择“等速”运动,速度设为100,单击属性管理器中的“确定” 按钮,完成马达的创建。
按钮,完成马达的创建。
 单击MotionManager工具栏上的“播放”
单击MotionManager工具栏上的“播放” ,臂通过键带动轴绕Z轴旋转,传动动画如图6-45所示,MotionManager界面如图6-46所示。
,臂通过键带动轴绕Z轴旋转,传动动画如图6-45所示,MotionManager界面如图6-46所示。
图6-45 传动动画
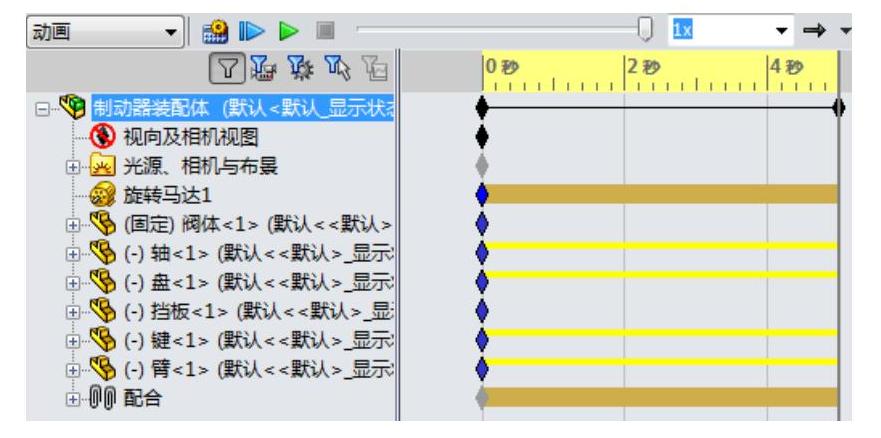
图6-46 MotionManager界面
 基于线性马达的动画
基于线性马达的动画
 新建运动算例,在制动器装配“FeatureManager设计树”上删除所有的配合,如图6-47所示。
新建运动算例,在制动器装配“FeatureManager设计树”上删除所有的配合,如图6-47所示。
 单击MotionManager工具栏上的“马达”
单击MotionManager工具栏上的“马达” 图标按钮,打开“马达”属性管理器。
图标按钮,打开“马达”属性管理器。
 在属性管理器“马达类型”一栏中选择“线性马达”,在视图中选择臂上的边线,属性管理器和线性方向,如图6-48所示。
在属性管理器“马达类型”一栏中选择“线性马达”,在视图中选择臂上的边线,属性管理器和线性方向,如图6-48所示。
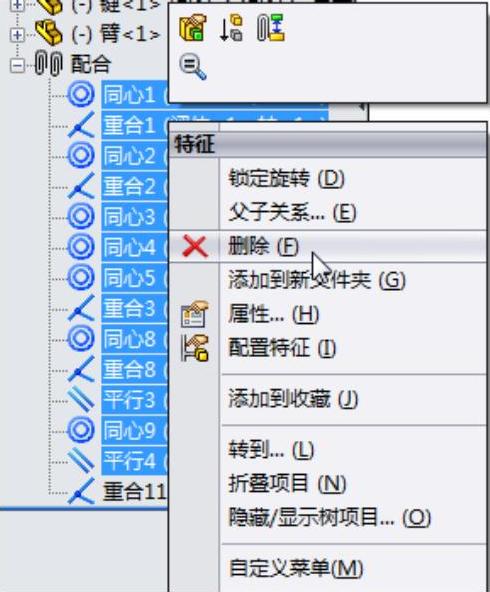
图6-47 “FeatureManager设计树”
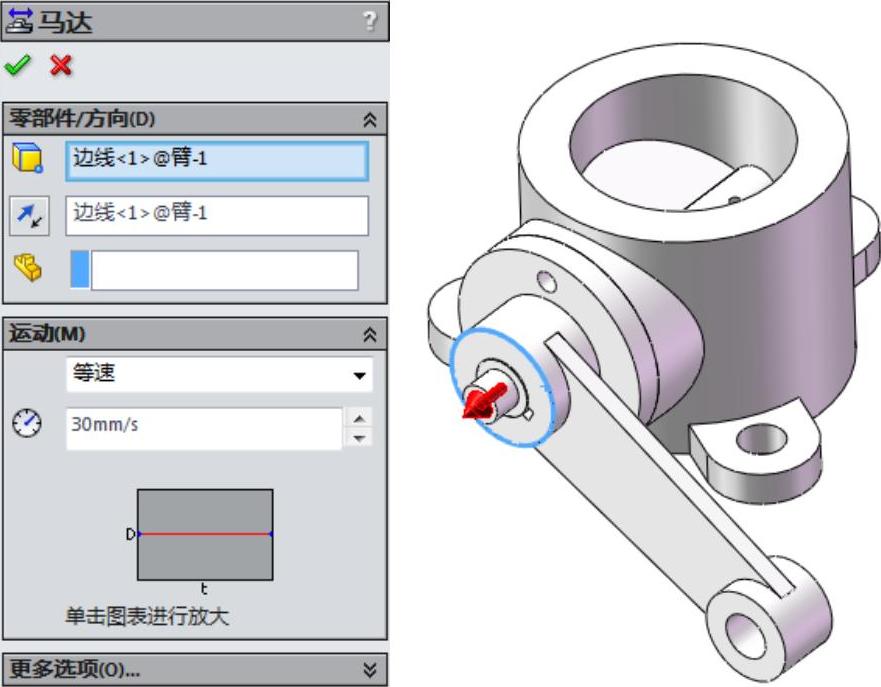
图6-48 属性管理器和线性方向(https://www.xing528.com)
 单击属性管理器中的“确定”
单击属性管理器中的“确定” 按钮,完成马达的创建。
按钮,完成马达的创建。
 单击MotionManager工具栏上的“马达”
单击MotionManager工具栏上的“马达” 图标按钮,打开“马达”属性管理器。
图标按钮,打开“马达”属性管理器。
 在属性管理器“马达类型”一栏中选择“线性马达”,在视图中选择键上的面,属性管理器和线性方向,如图6-51所示。
在属性管理器“马达类型”一栏中选择“线性马达”,在视图中选择键上的面,属性管理器和线性方向,如图6-51所示。
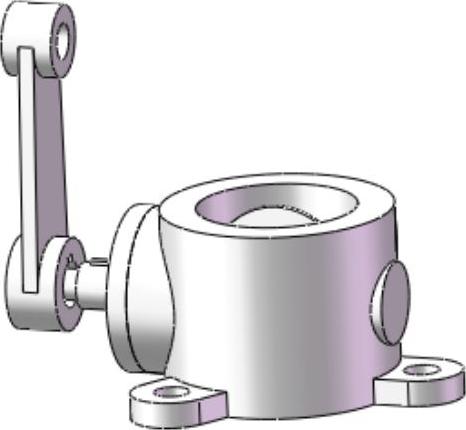
图6-49 传动动画
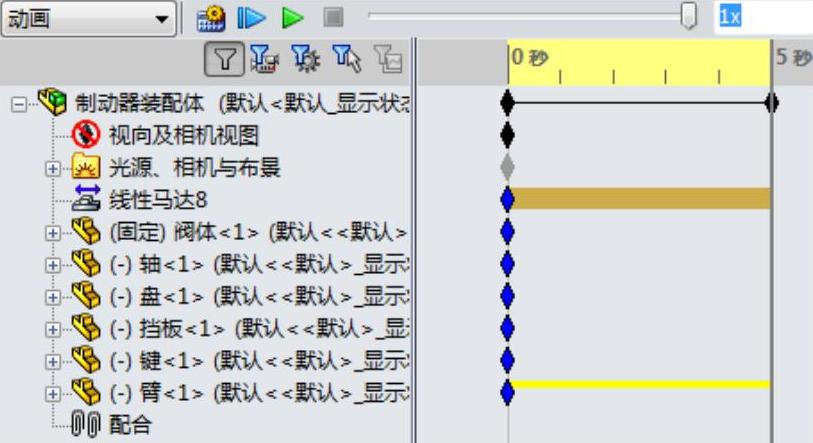
图6-50 MotionManager界面
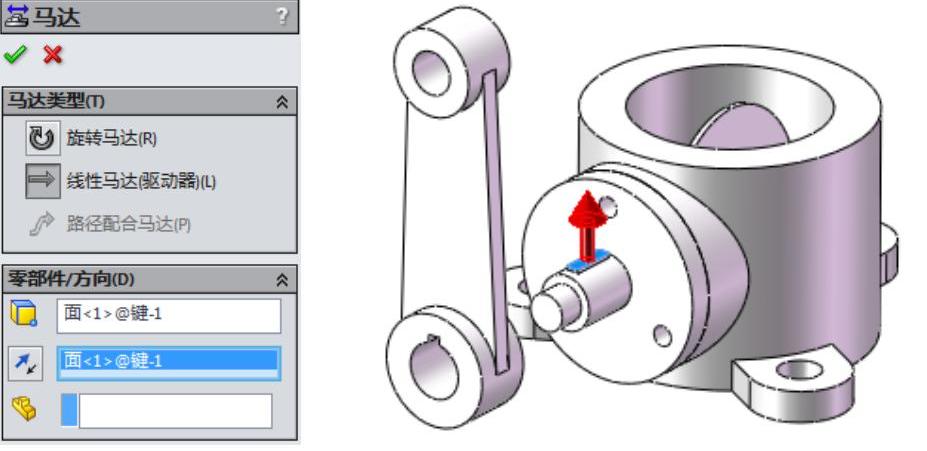
图6-51 选择零件和方向
 在属性管理器中选择“距离”运动,设置距离为250,起始时间为5秒,终止时间为10秒,如图6-52所示。
在属性管理器中选择“距离”运动,设置距离为250,起始时间为5秒,终止时间为10秒,如图6-52所示。
 单击属性管理器中的“确定”
单击属性管理器中的“确定” 按钮,完成马达的创建。
按钮,完成马达的创建。
 在MotionManager界面上的时间栏上将总动画持续时间拉到10秒处,在线性马达1更改栏5秒时间栏键码处单击鼠标右键,在打开的快捷菜单中单击关闭,关闭线性马达1。
在MotionManager界面上的时间栏上将总动画持续时间拉到10秒处,在线性马达1更改栏5秒时间栏键码处单击鼠标右键,在打开的快捷菜单中单击关闭,关闭线性马达1。
 单击MotionManager工具栏上的“播放”
单击MotionManager工具栏上的“播放” ,带轮通过键带动轴绕Z轴旋转,传动动画如图6-53所示。
,带轮通过键带动轴绕Z轴旋转,传动动画如图6-53所示。
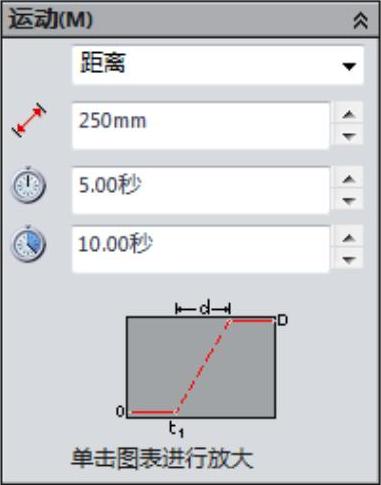
图6-52 设置“运动”参数
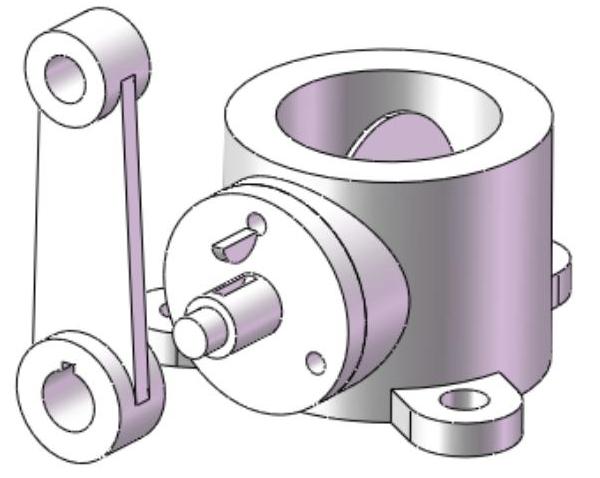
图6-53 传动动画
 动画的结果如图6-54所示,MotionManager界面如图6-55所示。
动画的结果如图6-54所示,MotionManager界面如图6-55所示。
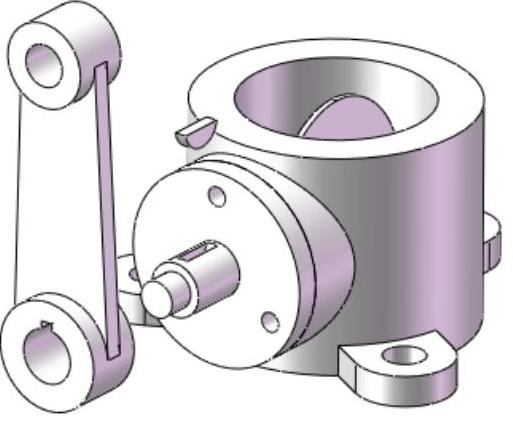
图6-54 动画结果
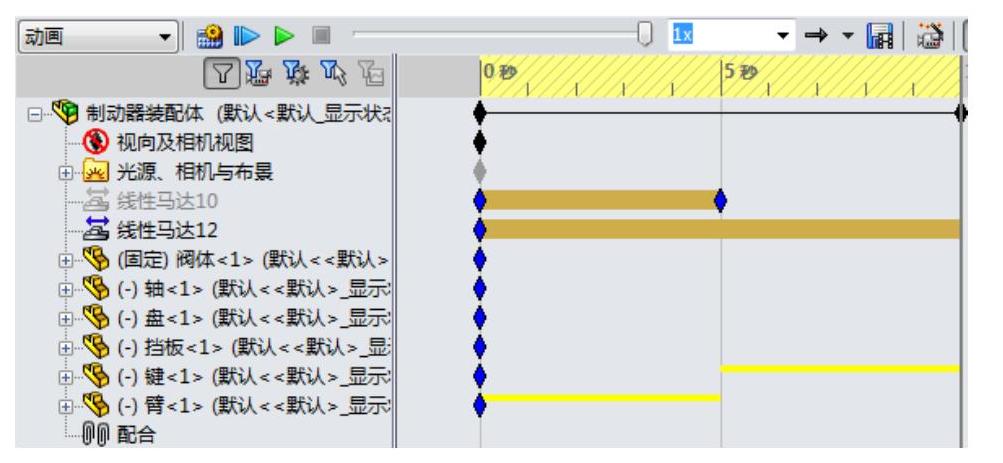
图6-55 MotionManager界面
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。