



连杆定义完成后,为了组成一个能够运动的机构,必须把两个相邻连杆以一种方式连接起来,这种连接必须是可动连接,不能是固定连接,所以需要为每个部件赋予一定的运动学特性,这种使两个连杆接触而又保持某些相对运动的可动连接称为“运动副”。在运动学中,连杆和运动副两者是相辅相成的,缺一不可。
运动副是指机构中两连杆之间组成的可动连接,添加运动副的目的是为了约束连杆之间的位置,限制连杆之间的相对运动并定义连杆之间的运动方式。在UG NX 10.0运动仿真中,系统提供了多种运动副可供使用,以满足连杆之间的相对运动要求,如“旋转副”可以实现连杆之间的相对旋转,“滑动副”可以实现连杆之间的直线平移。
选择定义运动副命令有以下四种方法。
方法一:选择下拉菜单

 命令。
命令。
方法二:在“运动”工具条中单击“运动副”按钮 。
。
方法三:在运动导航器窗口右击 ,在快捷菜单中选择
,在快捷菜单中选择 命令。
命令。
方法四:在运动导航器窗口右击 ,在快捷菜单中选择
,在快捷菜单中选择 命令。
命令。
选择定义运动副命令,系统弹出图10.2.7所示的“运动副”对话框(一)。
在“运动副”对话框(一)中单击 选项卡,系统弹出图10.2.8所示的“运动副”对话框(二),在该对话框中可以定义一部分运动副的驱动,使机构能够运动。
选项卡,系统弹出图10.2.8所示的“运动副”对话框(二),在该对话框中可以定义一部分运动副的驱动,使机构能够运动。
图10.2.8所示“运动副”对话框(二)中各选项说明如下。
●  下拉列表:该下拉列表用于选取为运动副添加驱动的类型。
下拉列表:该下拉列表用于选取为运动副添加驱动的类型。
☑  :设置运动副为等常运动(旋转或者是线性运动),需要的参数是位移、速度和加速度。
:设置运动副为等常运动(旋转或者是线性运动),需要的参数是位移、速度和加速度。
☑  :选择该选项,运动副产生一个正弦运动,需要的参数是振幅、频率、相位和角位移。
:选择该选项,运动副产生一个正弦运动,需要的参数是振幅、频率、相位和角位移。
☑  :选择该选项,将给运动副添加一个复杂的,符合数学规律的函数运动。
:选择该选项,将给运动副添加一个复杂的,符合数学规律的函数运动。
☑  :选择该选项,设置运动副以特定的步长和特定的步数的运动,需要的参数是步长和位移。
:选择该选项,设置运动副以特定的步长和特定的步数的运动,需要的参数是步长和位移。
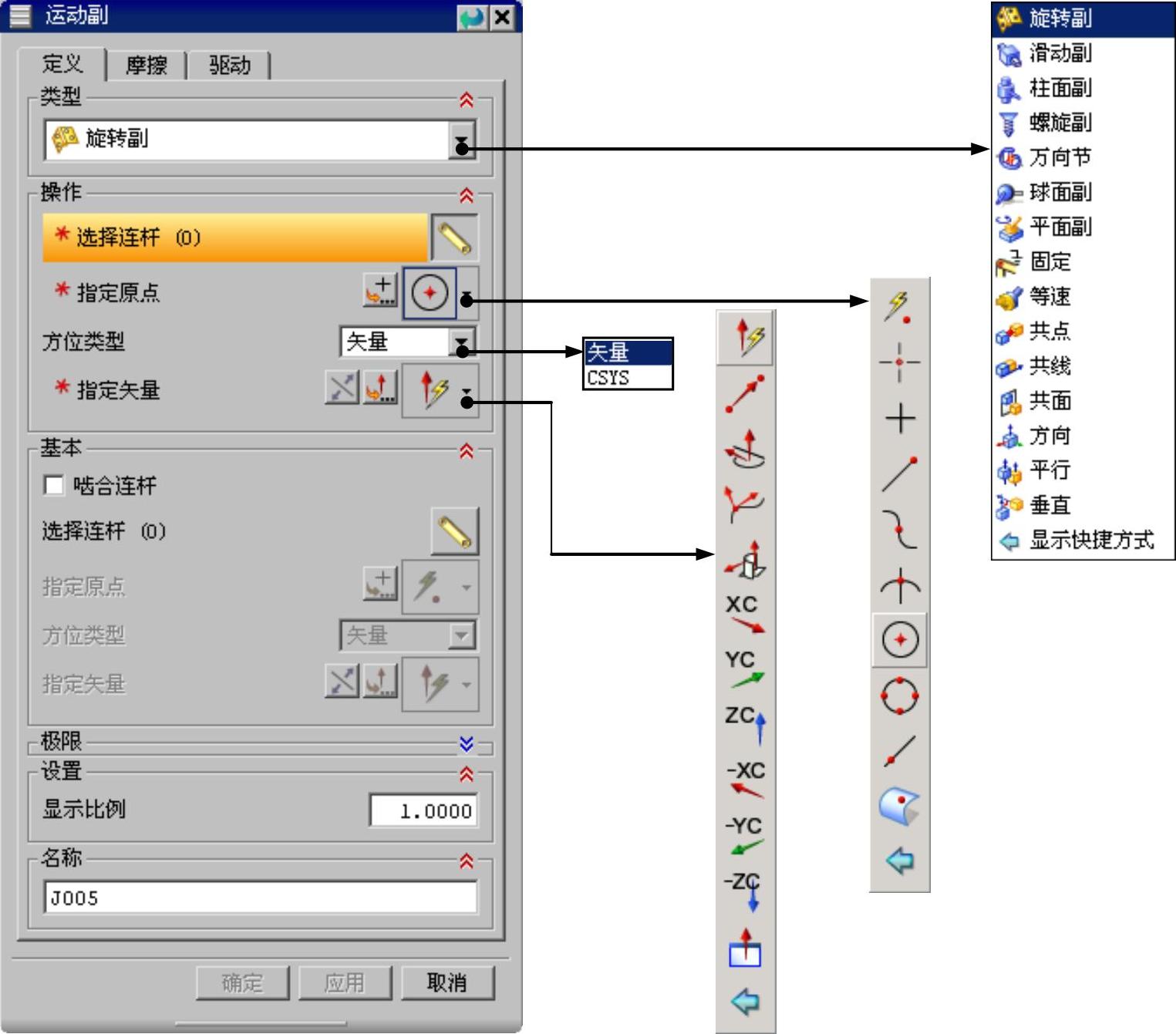
图10.2.7 “运动副”对话框(一)
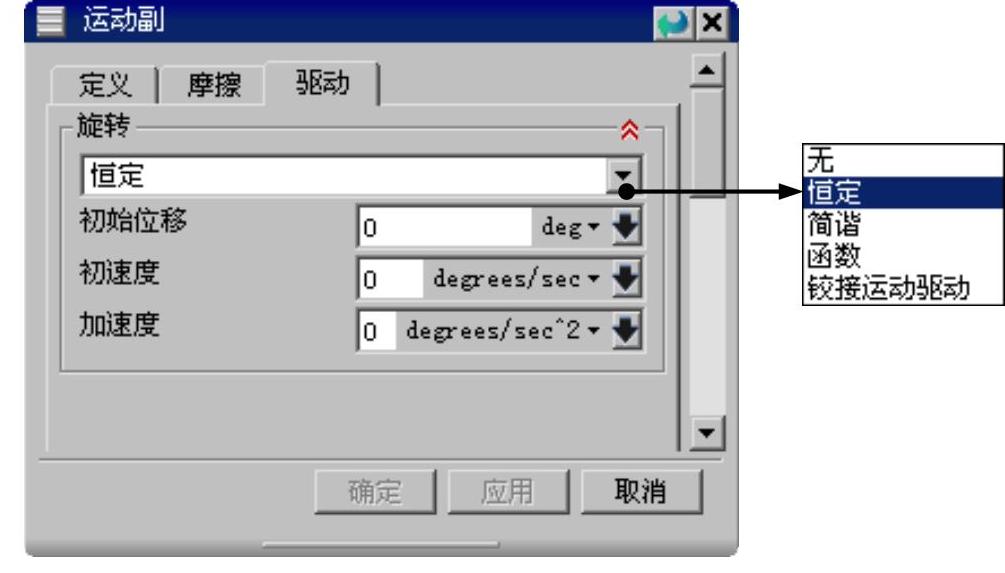
图10.2.8 “运动副”对话框(二)
●  文本框:该文本框中输入的数值定义初始位移。
文本框:该文本框中输入的数值定义初始位移。
●  文本框:该文本框中输入的数值定义运动副的初始速度。
文本框:该文本框中输入的数值定义运动副的初始速度。
●  文本框:该文本框中输入的数值定义运动副的加速度。
文本框:该文本框中输入的数值定义运动副的加速度。
1.旋转副
旋转副可以实现两个杆件绕同一轴作相对转动的运动副(图10.2.9)。旋转副又可分为两种形式,一种是两个连杆绕同一根轴作相对转动,另一种则是一个连杆绕固定的轴进行旋转。
2.滑动副
滑动副可以实现两个相连的部件互相接触并进行直线滑动(图10.2.10)。滑动副又可分为两种形式,一种是两个部件同时做相对的直线滑动;另一种则是一个部件在固定的在机架表面进行直线滑动。

图10.2.9 旋转副示意图
3.圆柱副
圆柱副可以连接两个部件使其中一个部件绕另一个部件进行相对的转动,并可以沿旋转轴方向进行直线运动,如图10.2.11所示。(https://www.xing528.com)
4.螺旋副
螺旋副可以实现一个部件绕另一个部件作相对的螺旋运动,用于模拟螺母在螺杆上的运动,如图10.2.12所示。
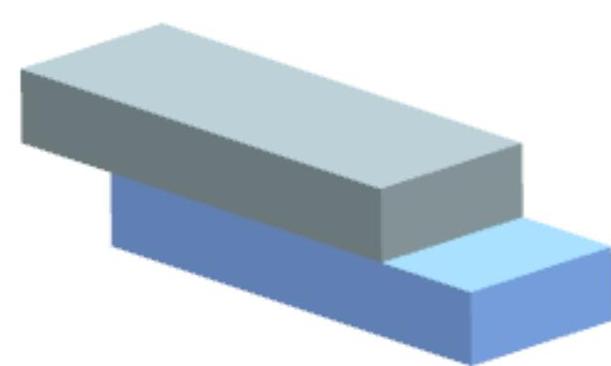
图10.2.10 滑动副示意图

图10.2.11 圆柱副

图10.2.12 螺旋副
5.万向节
万向节可以连接两个成一定角度的转动连杆,且它有两个转动自由度。它实现了两个部件之间可以绕互相成一定角度的两根轴作相对的转动,如图10.2.13所示。

图10.2.13 万向节
6.球面副
球面副连接实现了一个部件绕另一个部件(或机架)作相对三个自由度的运动,它只有一种形式必须是两个连杆相连,如图10.2.14所示。
7.平面副
平面副是两个连杆在相互接触的平面上自由滑动,并可以绕平面的法向作自由转动。平面连接可以实现两个部件之间以平面相接触,互相约束,如图10.2.15所示。

图10.2.14 球面副
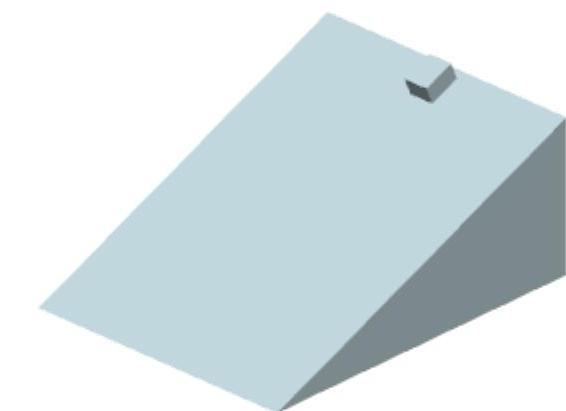
图10.2.15 平面副
8.共点副
点在线上连接实现一个部件始终与另一个部件或者是机架之间有点接触,实现相对运动的约束。共点副有四个运动自由度,如图10.2.16所示。
9.共线副
线在线上副模拟了两个连杆的凸轮运动关系。线在线上副不同于点在线上副,点在线上副中,接触点位于统一平面中;而线在线上副中,第一个连杆中的曲线必须和第二个连杆保持接触且相切,如图10.2.17所示。

图10.2.16 共点副
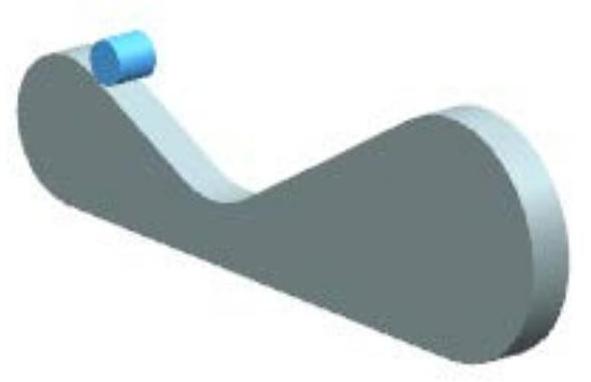
图10.2.17 共线副
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。