



新建运动仿真文件完成后,需要将机构中的元件定义为“连杆”(Links)。这里的“连杆”并不是单指“连杆机构”中的杆件,而是指能够满足运动需要的,使用运动副连接在一起的机构元件。连杆相互连接,构成运动机构,连杆在整个机构中主要是进行运动的传递。机构中所有参与当前运动仿真的部件都必须定义为连杆,在机构运行时固定不动的元件则需要定义为“固定连杆”。
定义连杆需要指定一个几何体对象,几何体对象可以是二维的,如草图、曲线等,也可以是三维的,如曲面、实体等,同一个几何对象只能属于一个连杆,定义连杆时可以选择独立的几何体,也可以选择一个零件。
选择定义连杆命令有以下三种方法。
方法一:选择下拉菜单

 命令。
命令。
方法二:在“运动”工具条中单击“连杆”按钮 。
。
方法三:在运动导航器窗口右击 ,在快捷菜单中选择
,在快捷菜单中选择 命令。
命令。
下面以一个实例讲解指定连杆的一般过程。
Step1.打开文件D:\ug10pd\work\ch10.02\DEF_LINKS.prt。
Step2.选择

 命令进入运动仿真模块。
命令进入运动仿真模块。
Step3.新建仿真文件。
(1)在“运动导航器”中右击 ,在弹出的快捷菜单中选择
,在弹出的快捷菜单中选择 命令,系统弹出图10.2.1所示的“环境”对话框。
命令,系统弹出图10.2.1所示的“环境”对话框。
图10.2.1所示的“环境”对话框说明如下。
●  :选中该单选项,指在不考虑运动原因状态下,研究机构的的位移、速度、加速度与时间的关系。
:选中该单选项,指在不考虑运动原因状态下,研究机构的的位移、速度、加速度与时间的关系。
●  :选中该选项,指考虑运动的真正因素,力、摩擦力、组件的质量和惯性等及其他影响运动的因素。
:选中该选项,指考虑运动的真正因素,力、摩擦力、组件的质量和惯性等及其他影响运动的因素。
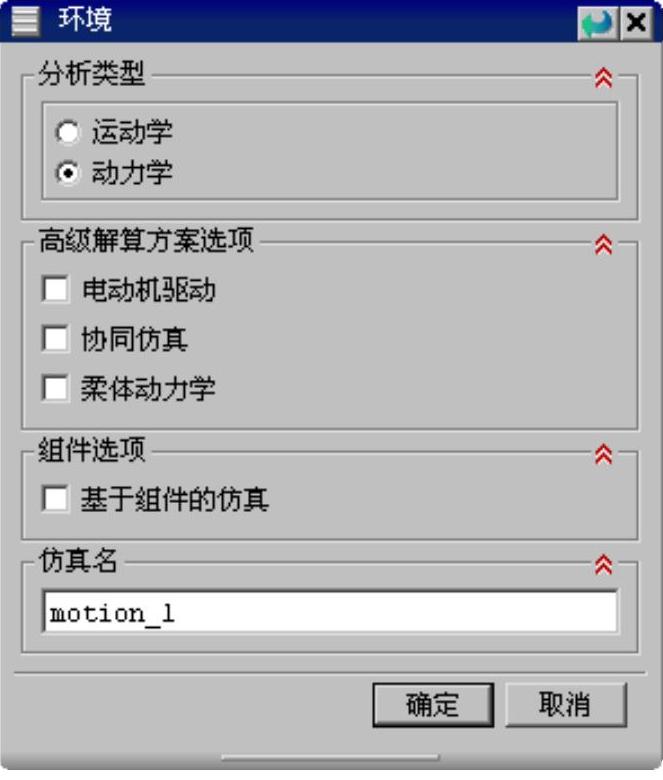
图10.2.1 “环境”对话框
(2)在“环境”对话框中选中 单选项,单击
单选项,单击 按钮,在系统弹出图10.2.2所示的“机构运动副向导”对话框中单击
按钮,在系统弹出图10.2.2所示的“机构运动副向导”对话框中单击 按钮。
按钮。
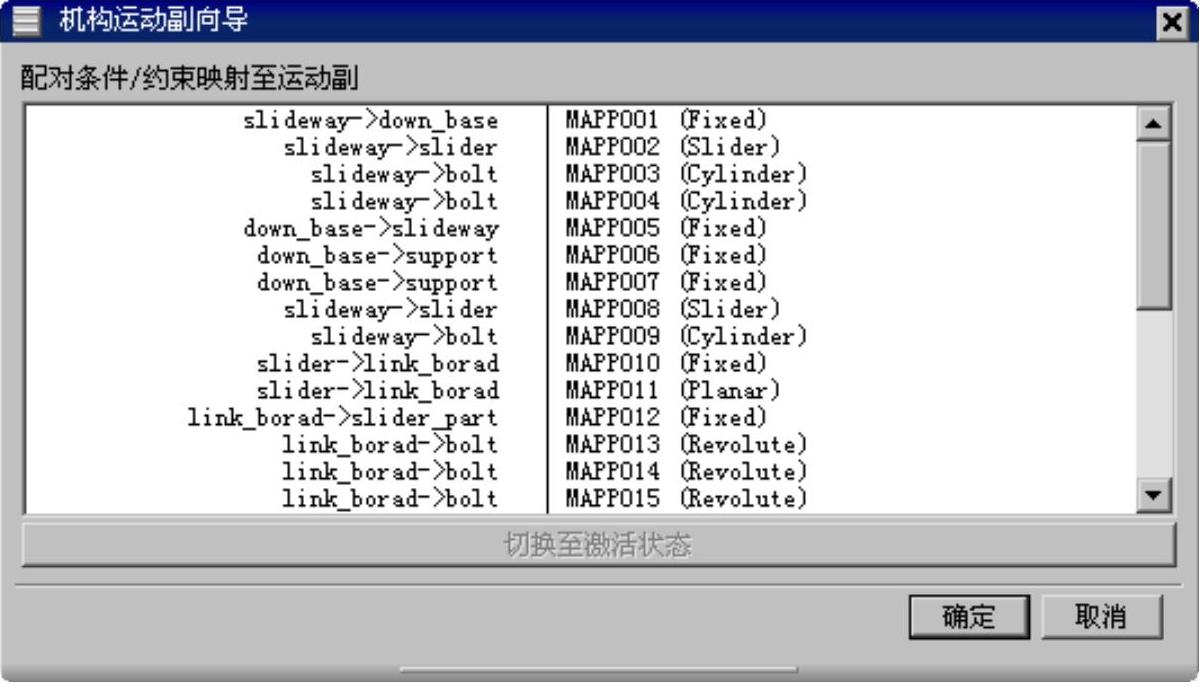
图10.2.2 “机构运动副向导”对话框
图10.2.2所示的“机构运动副向导”对话框说明如下。
●  :单击该按钮,接受系统自动对机构进行分析而生成的机构运动副向导,且为系统中的每一个相邻零件创建一个运动副,这些运动副可以根据分析需要进行激活或不激活。
:单击该按钮,接受系统自动对机构进行分析而生成的机构运动副向导,且为系统中的每一个相邻零件创建一个运动副,这些运动副可以根据分析需要进行激活或不激活。
●  :单击该按钮,不接受系统自动生成的机构运动副。
:单击该按钮,不接受系统自动生成的机构运动副。
Step4.选择下拉菜单

 命令,系统弹出图10.2.3所示的“连杆”对话框。
命令,系统弹出图10.2.3所示的“连杆”对话框。
Step5.定义第一个连杆(固定连杆)。在“连杆”对话框中选中 复选框,在
复选框,在 的提示下,选取图10.2.4所示的对象(共13个零部件)为连杆1对象(具体操作请参看随书光盘录像)。(https://www.xing528.com)
的提示下,选取图10.2.4所示的对象(共13个零部件)为连杆1对象(具体操作请参看随书光盘录像)。(https://www.xing528.com)
Step6.单击“连杆”对话框中的 按钮,完成连杆1的指定。
按钮,完成连杆1的指定。
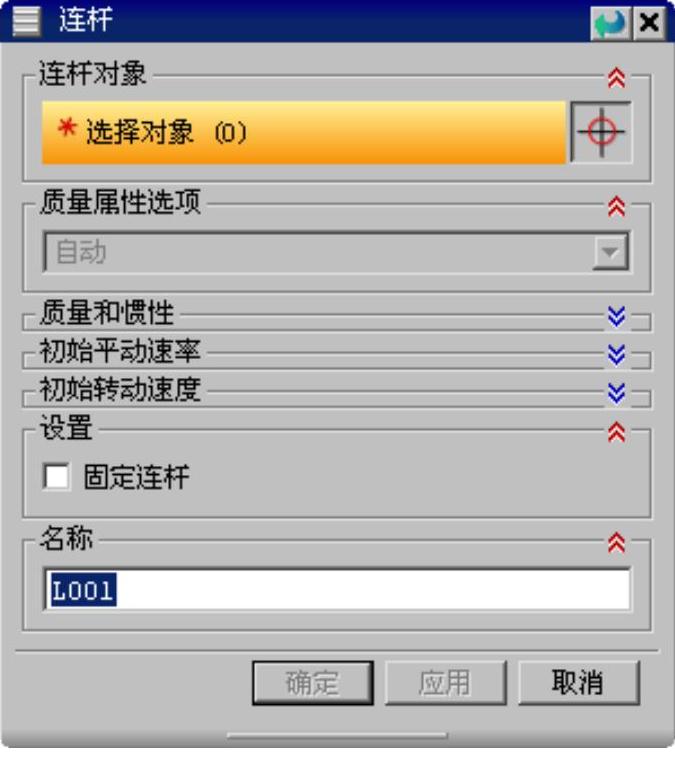
图10.2.3 “连杆”对话框
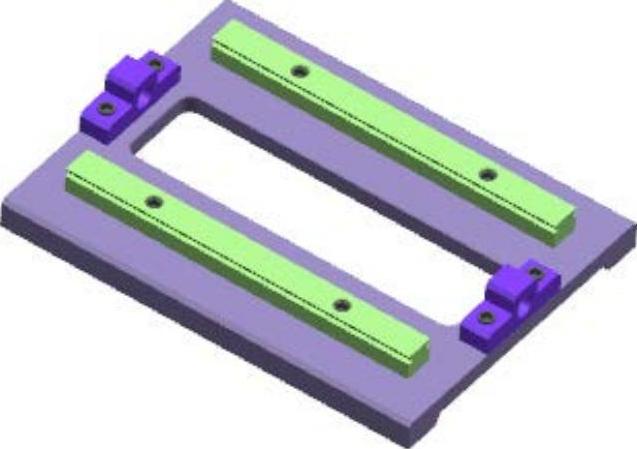
图10.2.4 选取连杆1对象
图10.2.3所示“连杆”对话框的选项说明如下。
●  :该区域用于选取零、部件作为连杆。
:该区域用于选取零、部件作为连杆。
●  :用于设置连杆的质量属性。
:用于设置连杆的质量属性。
☑  :选择该选项后,将由用户设置连杆的质量。
:选择该选项后,将由用户设置连杆的质量。
●  :用于设置连杆惯性矩的相关属性。
:用于设置连杆惯性矩的相关属性。
●  :用于设置连杆最初的移动速度。
:用于设置连杆最初的移动速度。
●  :用于设置连杆最初的转动速度。
:用于设置连杆最初的转动速度。
●  :用于设置连杆的基本属性。
:用于设置连杆的基本属性。
☑  :选中该复选框后,连杆将固定在当前位置不动。
:选中该复选框后,连杆将固定在当前位置不动。
☑  :通过该文本框可以为连杆指定一个名称。
:通过该文本框可以为连杆指定一个名称。
Step7.定义第二个连杆。在“连杆”对话框中取消选中 复选框,选取图10.2.5所示的部件(共16个零部件和一个点)为连杆2对象(具体操作请参看随书光盘录像),单击“连杆”对话框中的
复选框,选取图10.2.5所示的部件(共16个零部件和一个点)为连杆2对象(具体操作请参看随书光盘录像),单击“连杆”对话框中的 按钮。
按钮。
Step8.定义第三个连杆。在“连杆”对话框中取消选中 复选框,选取图10.2.6所示的零件(包括两个零部件和一条螺旋线)为连杆3对象(具体操作请参看随书光盘录像),单击“连杆”对话框中的
复选框,选取图10.2.6所示的零件(包括两个零部件和一条螺旋线)为连杆3对象(具体操作请参看随书光盘录像),单击“连杆”对话框中的 按钮。完成所有连杆定义。
按钮。完成所有连杆定义。
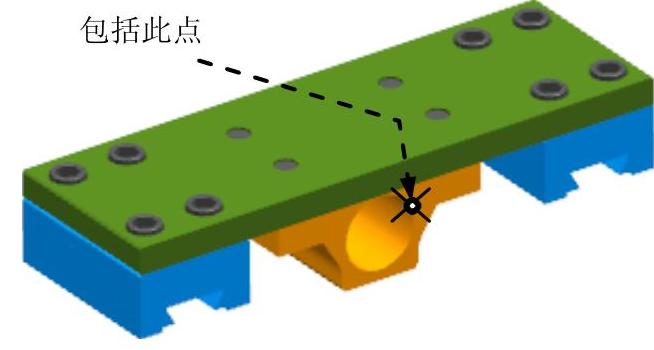
图10.2.5 定义连杆2
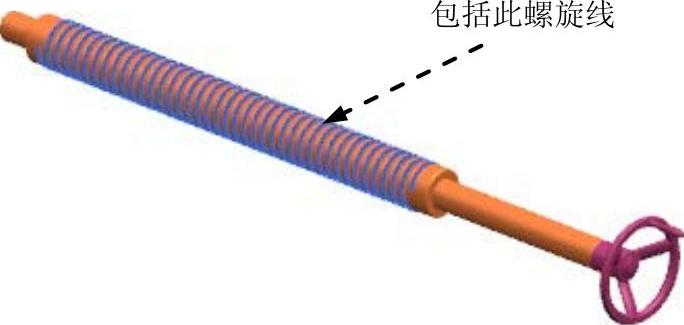
图10.2.6 定义连杆3
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。