



在运动仿真模块中,与“机构”相关的操作命令主要位于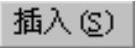 下拉菜单中,如图10.1.2所示,工具栏列出下拉菜单中常用的工具栏,如图10.1.3所示。
下拉菜单中,如图10.1.2所示,工具栏列出下拉菜单中常用的工具栏,如图10.1.3所示。
图10.1.3所示“运动”工具条中各按钮的说明如下。
● A(环境):设置运动仿真的类型为运动学或动力学。
● B(主模型尺寸):用于修改部件的特征或草图尺寸。
● C(函数管理器):创建相应的函数并绘制图表,用于确定运动驱动的标量力、矢量力或扭矩。
● D(连杆):用于定义机构中刚性体的部件。
● E(运动副):用于定义机构中连杆之间的受约束的情况。
● F1(齿轮):用于定义两个旋转副之间的相对旋转运动。
● F2(齿轮齿条副):用于定义滑动副和旋转副之间的相对运动。
● F3(线缆副):用于定义两个滑动副之间的相对运功。
● F4(2-3传动副):用于定义两个或三个旋转副、滑动副和柱面副之间的相对运动。
● G1(弹簧):在两个连杆之间、连杆和框架之间创建一个柔性部件,使用运动副施加力或扭矩。
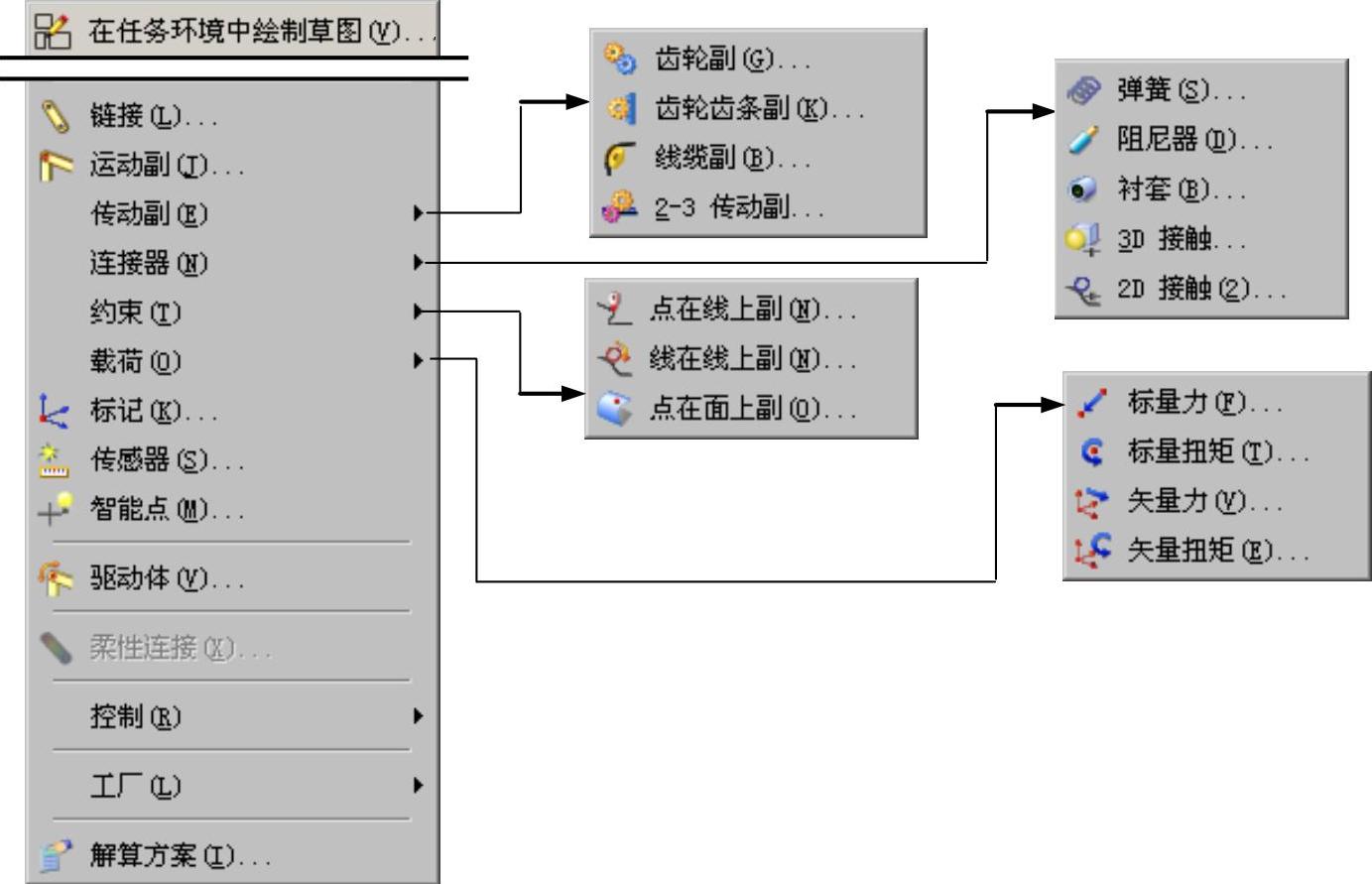
图10.1.2 “插入”下拉菜单
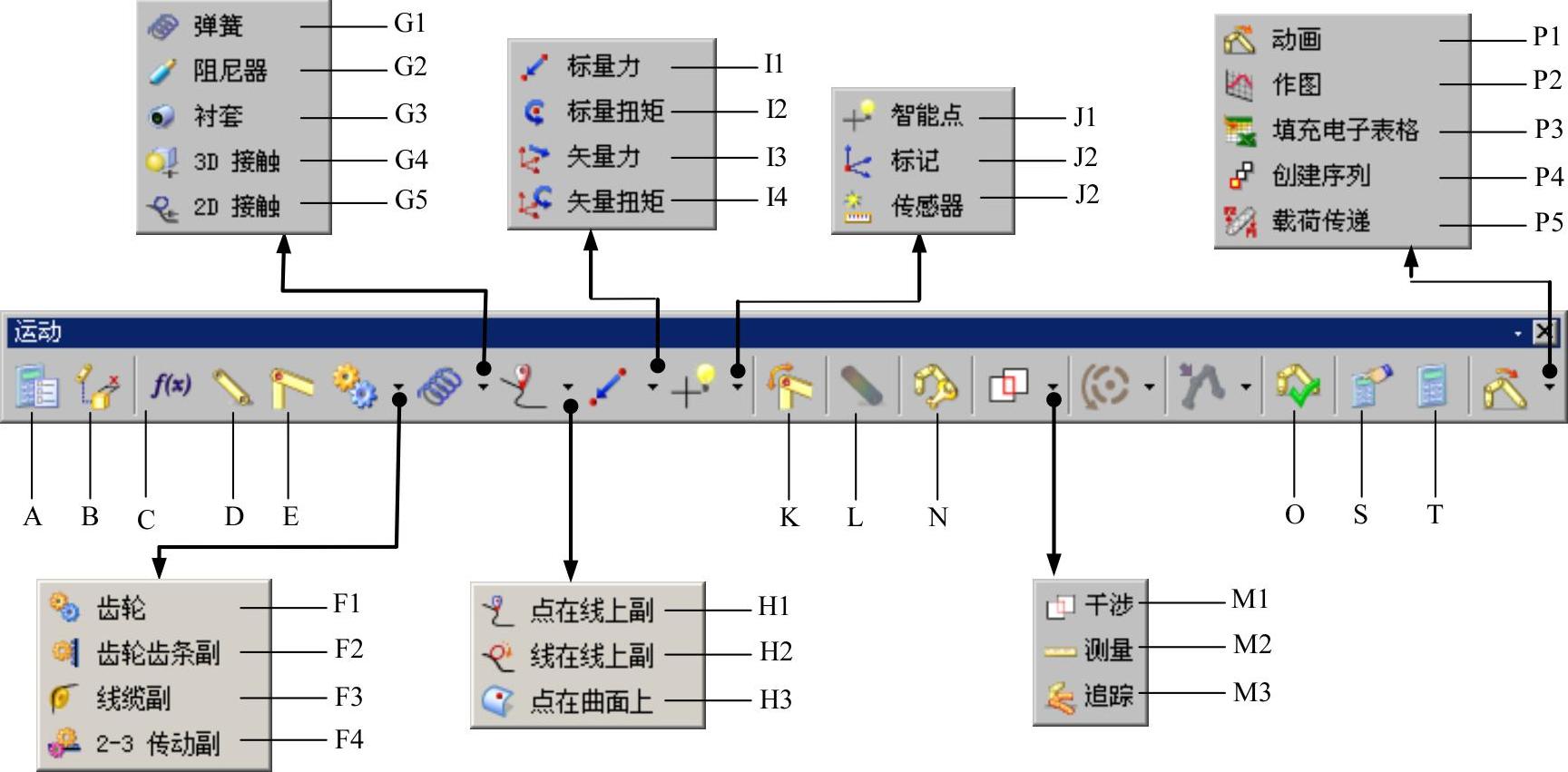
图10.1.3 “运动”工具条
● G2(阻尼器):在两个连杆、一个连杆和框架、一个可平移的运动副或在一个旋转副上创建一个反作用力或扭矩。
● G3(衬套):创建圆柱衬套,用于在两个连杆之间定义柔性关系。
● G4(3D接触):在机构中的零件之间定义接触关系。
● G5(2D接触):在共面的两条曲线之间创建接触关系,使附着于这些曲线上的连杆产生与材料有关的影响。
● H1(点在线上副):将连杆上的一个点与曲线建立接触约束。
● H2(线在线上副):将连杆上的一条曲线与另一曲线建立接触约束。
● H3(点在曲面上):将连杆上的一个点与面建立接触约束。(https://www.xing528.com)
● I1(标量力):用于在两个连杆或在一个连杆和框架之间创建标量力。
● I2(标量扭矩):在围绕旋转副和轴之间创建标量扭矩。
● I3(矢量力):用于在两个连杆或在一个连杆和框架之间创建一个力,力的方向可保持恒定或相对于一个移动体而发生变化。
● I4(矢量扭矩):在两个连杆或在一个连杆和一个框之间创建一个扭矩。
● J1(智能点):用于创建与选定几何体关联的一个点。
● J2(标记):用于创建创一个标记,该标记必须位于需要分析的连杆上。
● J3(传感器):创建传感器对象以监控运动对象相对仿真条件的位置。
● K(驱动):为机构中的运动副创建一个独立的驱动。
● L(柔性连接):定义该机构中的柔性连接。
● M1(干涉):用于检测整个机构是否与选中的几何体之间在运动中存在碰撞。
● M2(测量):用于测量机构中两组几何体之间的最小距离或最小夹角。
● M3(追踪):在运动的每一步创建选中几何体对象的副本。
● N(编辑运动对象):用于编辑连杆、运动副、力、标记或运动约束。
● O(模型检查):用于验证所有运动对象。
● P1(动画):根据机构在指定时间内仿真步数,执行基于时间的运动仿真。
● P2(作图):为选定的运动副和标记创建指定可观察量的图表。
● P3(填充电子表格):将仿真中每一步运动副的位移数据填充到一个电子表格文件。
● P4(创建序列):为所有被定义为机构连杆的组件创建运动动画装配序列。
● P5(载荷传递):计算反作用载荷以进行结构分析。
● S(解算方案):创建一个新解算方案,其中定义了分析类型、解算方案类型以及特定于解算方案的载荷和运动驱动。
● T(求解):创建求解运动和解算方案并生成结果集。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。