



1.起动PLCSIM
在SIMATIC管理器中,打开项目“PID控制”。单击工具栏上的 按钮,打开PLCSIM。将用户程序和组态信息下载到仿真PLC,将仿真PLC切换到RUN-P模式。
按钮,打开PLCSIM。将用户程序和组态信息下载到仿真PLC,将仿真PLC切换到RUN-P模式。
2.用STEP 7的变量表监控程序的运行
根据调试的需要,可以用变量表集中监视和修改PID控制器的关键参数。图9-14是调试PID控制例程时使用的变量表,单击 按钮,“修改数值”被传送到PLC。
按钮,“修改数值”被传送到PLC。
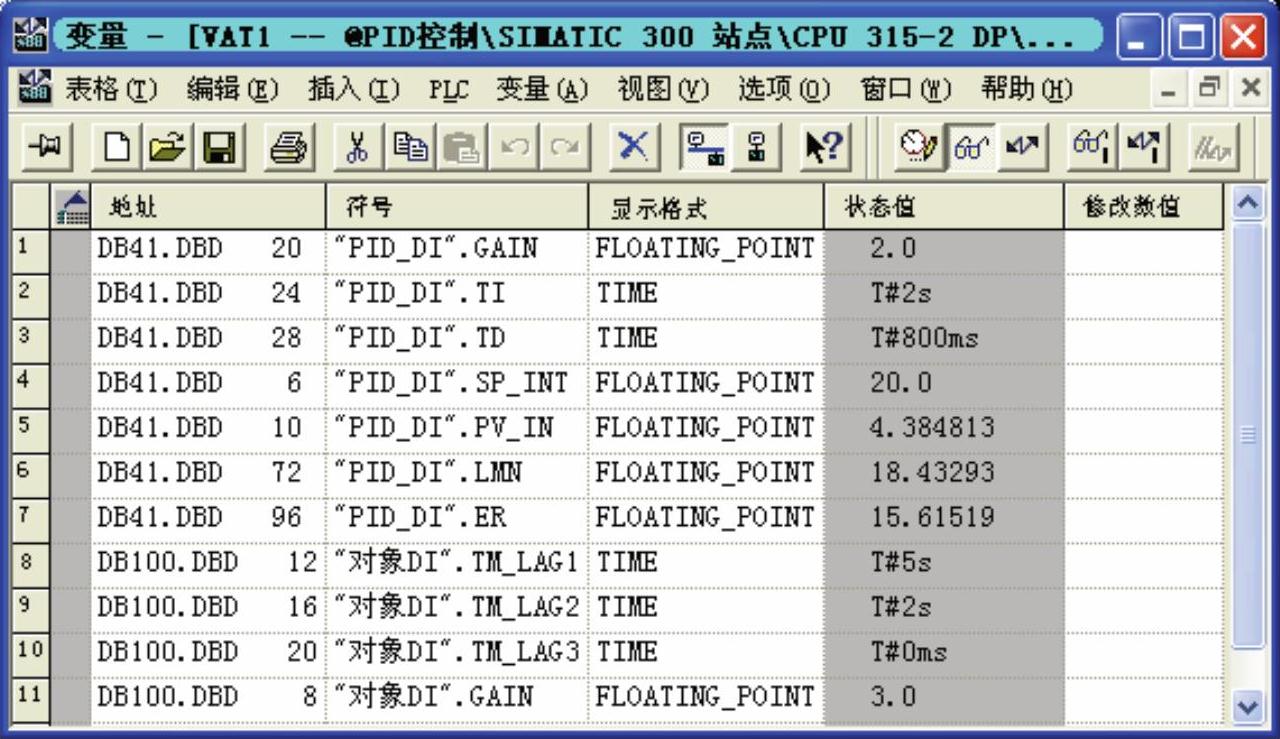
图9-14 变量表
在运行时监视闭环控制系统的输出量OUTV(见图9-4),或FB41的过程变量输入值PV_IN(二者相等),可以观察到PID控制的效果。
通过监视功能块的背景数据块,可以监视功能块除了临时局部变量之外的其他变量,还可以看到调用功能块时未指定实参的变量的默认值。
上述监控方法不像下面将要看到的人机界面趋势视图中的曲线那样形象直观,如果系统的动态过程变化太快,监控更为困难。
3.用触摸屏的趋势视图监控PID控制程序
打开WinCC Flexible,单击工具栏上的 按钮,起动运行系统,出现仿真面板(见图9-15)。
按钮,起动运行系统,出现仿真面板(见图9-15)。
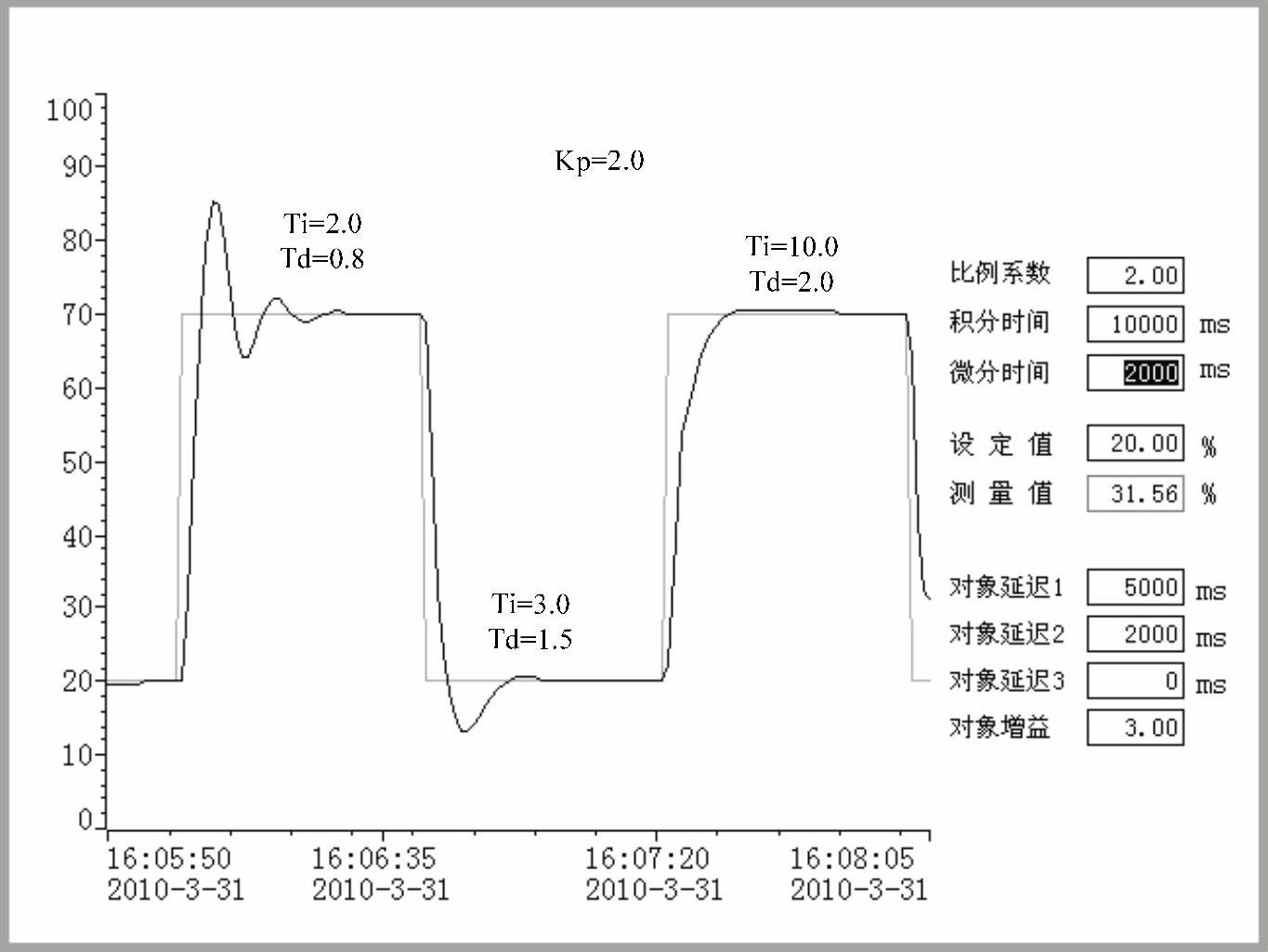
图9-15 PID的阶跃响应曲线
由于PLC的OB1中梯形图程序的作用,PID控制器的给定值在20%~70%之间阶跃变化,趋势视图中对应的曲线为绿色的方波。被控对象的输出变量(即PID控制器的过程变量或反馈值)为黑色的曲线。
下面是PID控制器的初始值:比例系数为2.00,积分时间为2.0s,微分时间为0.8s,对象的增益和延迟时间见图9-15。图中左边的给定输入的上升沿对应的响应曲线使用的是PID控制器参数的初始值,该曲线的超调量过大,有多次震荡。
单击画面上的文本域“积分时间”右侧的输入/输出域(见图9-15),用出现的数字键盘将积分时间改为3000ms。用同样的方法将微分时间改为1500ms。中间的下降曲线是修改参数后的响应曲线,其超调量和震荡次数显著减小。
将积分时间改为10000ms,微分时间改为2000ms。右边的上升曲线是对应的响应曲线,其超调量几乎为0。
图9-16的积分时间为3000ms,微分时间为4000ms。因为微分作用过强,在误差剧烈变化时,对误差变化的抑制作用太剧烈,曲线上出现了“毛刺”,变得很怪异。这种现象提示应减弱微分部分。(https://www.xing528.com)
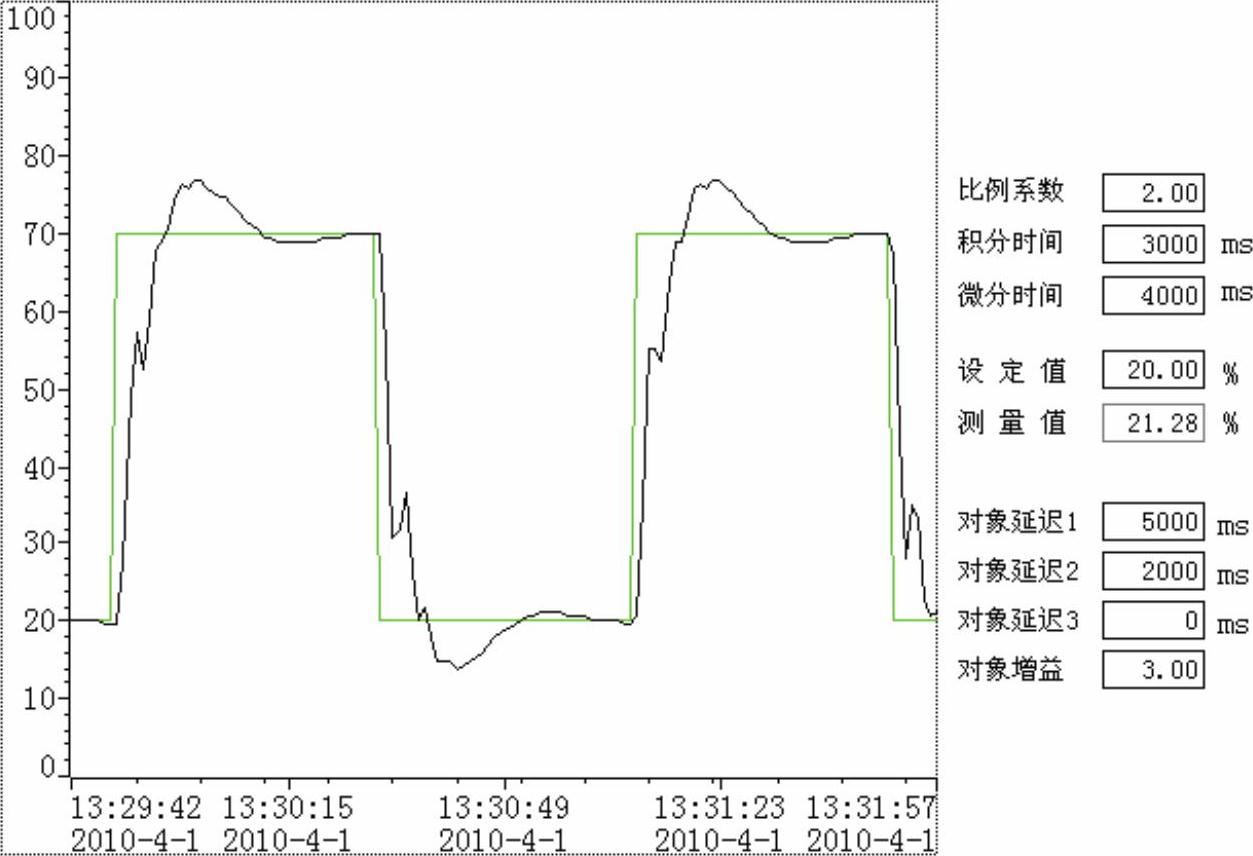
图9-16微分作用过强的阶跃响应曲线
图9-17的微分时间恒为0(即采用PI调节),积分时间为8000ms。左边和中间的响应曲线的控制器增益(即比例系数)为2.0,右边的响应曲线的控制器增益为1.0,比例作用和积分作用被同时减弱。可以看出,减小控制器增益能显著降低超调量。
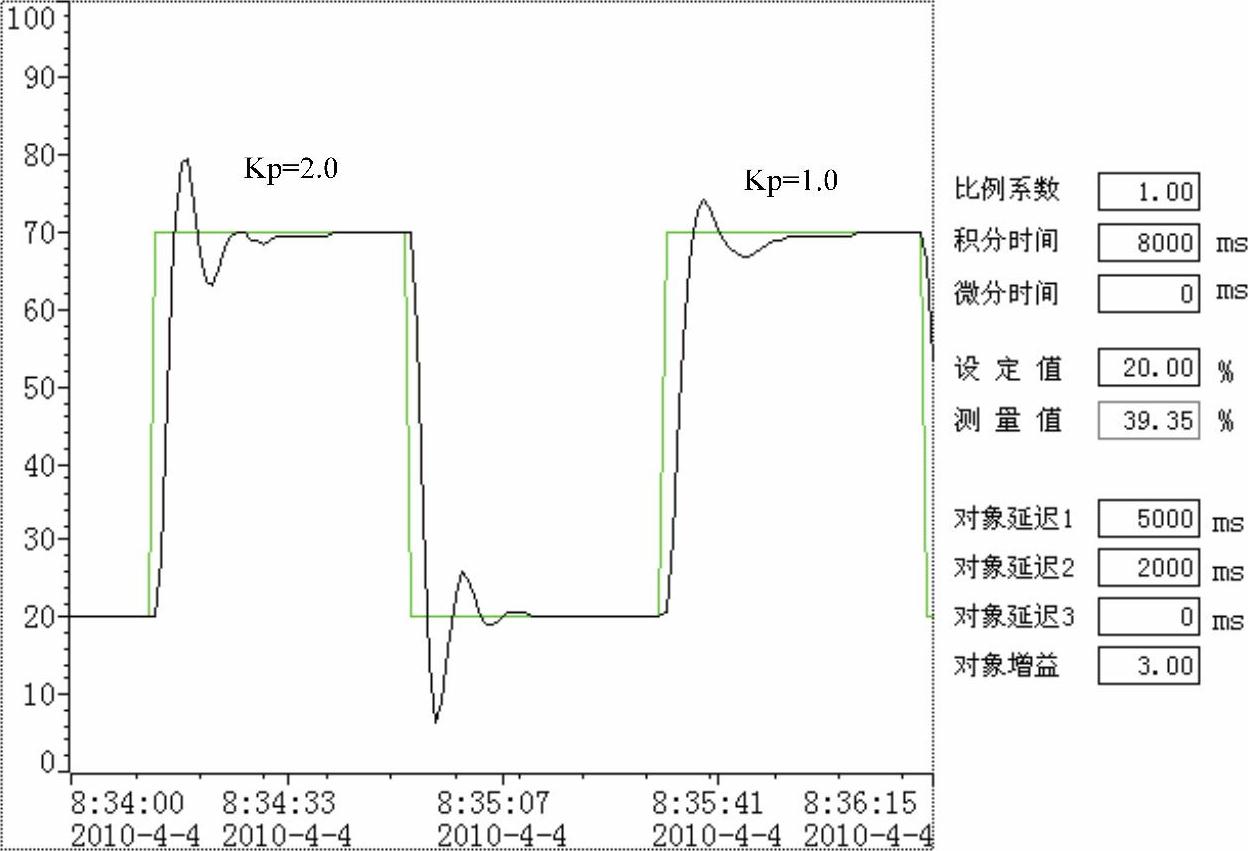
图9-17 PI调节器的阶跃响应曲线
4.PID参数整定的仿真练习
读者可以利用随书光盘中的项目“PID控制”,进行下面的仿真练习:
1)运行仿真闭环控制系统,修改图9-15中PID控制器的比例系数、积分时间和微分时间,观察控制器参数与系统性能之间的关系,学习PID参数的整定方法。
2)在图9-15中PID的参数固定不变的情况下,改变OB35的循环执行周期(即PID控制器的采样周期)和FB41、FB100中的参数CYCLE(三者应相同),观察采样周期对系统性能的影响,了解整定采样周期的方法。
3)令微分时间恒为0(即采用PI调节),调节比例系数和积分时间,直到得到较为满意的控制效果。
4)修改被控对象的参数,然后调节PID控制器的参数,直到得到较为满意的控制效果。
5.仿真系统的程序与实际的PID程序的区别
为了用于实际的PID控制,在例程“PID控制”程序的基础上,应作下列改动:
1)删除OB100和OB35中调用FB100(过程对象)的指令。
2)实际的PID控制程序使用来自AI模块的过程变量PV_PER,用来选择输入变量的PVPER_ON应设置为TRUE(使用外设变量),不用设置浮点数过程变量PV_IN,外设变量PV_PER应设为实际使用的模拟量输入模块的通道地址。
3)不用设置浮点数输出LMN的实参,LMN_PER(外设输出值)设为实际使用的模拟量输出模块的通道地址。
4)如果系统需要自动/手动两种工作模式的切换,FB41的参数MAN_ON应设置为切换自动/手动的位变量,手动时该变量为ON。参数MAN设置为用于输入手动值的地址。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。