



PID控制的难点不是编写或阅读程序,而是整定控制器的参数,需要调试的参数主要有比例系数GAIN、积分时间TI、微分时间TD和采样周期CYCLE。如果使用PI控制器,也有3个主要的参数需要整定。如果参数整定得不好,即使程序设计没有问题,系统的动静态性能也达不到要求,甚至会使系统不能稳定运行。
要整定PID控制器的参数,需要做闭环实验。本书介绍的PID控制器的闭环仿真实验用PLCSIM对闭环系统仿真,用WinCC flexible的趋势图显示PID控制器的方波给定曲线和被控量的阶跃响应曲线。PLCSIM不支持对SFB41~SFB43的仿真,但是可以对FB41~FB43仿真。
1.闭环仿真系统的结构
随书光盘中的例程“PID控制”用功能块FB100模拟实际的执行机构和被控对象,与FB41组成闭环(见图9-4)。不需要任何PLC的硬件和PLC外部的执行机构、检测元件和被控对象,就可以模拟闭环控制系统。
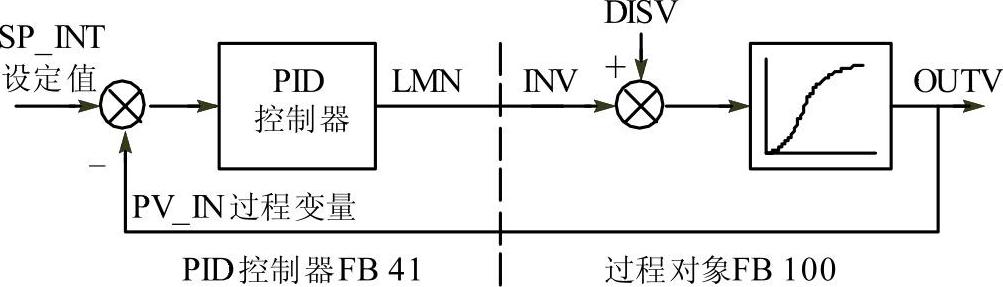
图9-4 闭环仿真系统的结构
可以用人机界面画面上的IO域(见图9-10)来修改PID控制器和被控对象的参数,通过运行用户程序,观察闭环控制的效果。人机界面的功能也是用仿真实现的。该例程可以用来学习PID控制功能块FB41的使用方法,熟悉PID控制器的参数的整定方法。
例程“PID控制”中的闭环系统用FB100来模拟3个串联的惯性环节,其比例增益为GAIN,惯性环节的时间常数分别为TM_LAG1~TM_LAG3。其传递函数为

分母中的“s”为自动控制理论中拉式变换的拉普拉斯算子。将某一时间常数设置为0,可以减少被控对象的阶数。图9-4中的DISV是系统的扰动量。
2.生成项目与站点
打开STEP 7,用“新建项目向导”生成一个名为“PID控制”的项目(见随书光盘中的同名例程),CPU的型号为CPU 315-2DP。
选中管理器左侧的项目窗口最上面的项目图标,执行菜单命令“插入”→“站点”→“SIMATIC HMI Station”,在出现的对话框中设置HMI的型号为8in的MP277触摸屏。
3.组态站点之间的连接
单击工具栏上的 按钮,打开网络组态工具NetPro(见图8-6上面的图),将S7-300站点和HMI站点连接到MPI网络上,它们的MPI站地址分别为2和1。单击工具栏上的
按钮,打开网络组态工具NetPro(见图8-6上面的图),将S7-300站点和HMI站点连接到MPI网络上,它们的MPI站地址分别为2和1。单击工具栏上的 按钮,保存和编译网络组态信息。
按钮,保存和编译网络组态信息。
4.打开WinCC flexible的项目
关闭NetPro,返回SIMATIC管理器,选中WinCC flexible站点中的“画面”(见图8-5),双击管理器右侧的工作区中的“画面_1”图标,自动打开WinCC flexible的“画面”编辑器。
双击WinCC flexible右侧项目视图中的“连接”,打开连接编辑器(见图8-10),在“激活的”列选中“开”。
5.生成趋势图
打开“画面_1”,选中工具箱中的“趋势视图”,将它拖放到画面上(见图9-10)。图9-5~图9-9给出了组态趋势视图各参数组的属性视图。

图9-5 组态趋势视图的常规属性(https://www.xing528.com)
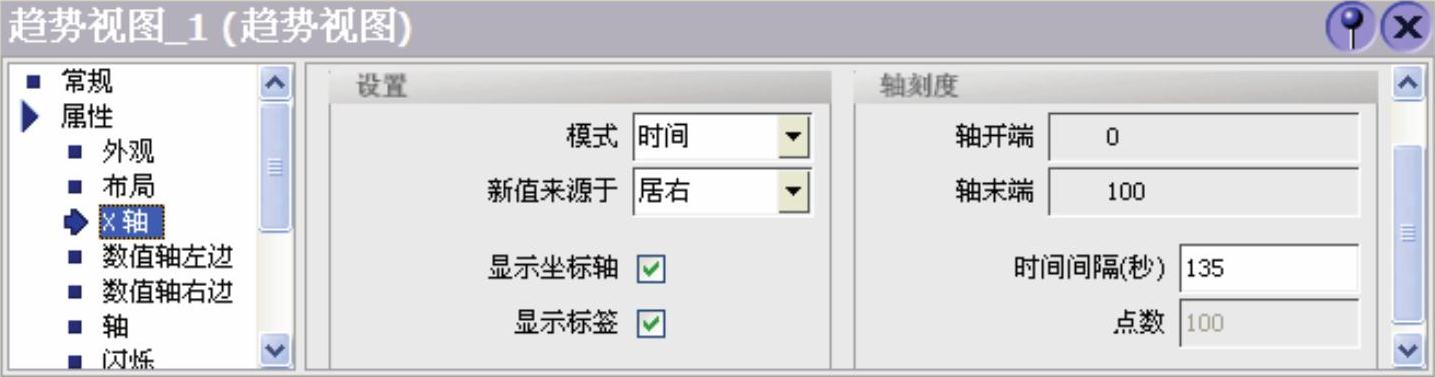
图9-6 组态趋势视图的X轴
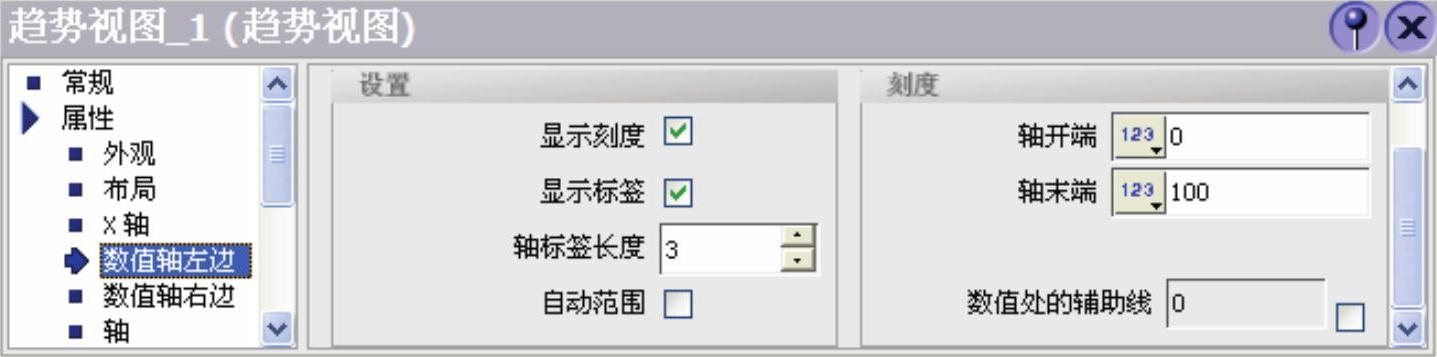
图9-7 组态趋势视图左边的数值轴
组态右边数值轴时,未选中复选框“显示刻度”和“显示标签”,因此不会显示右边的数值轴。
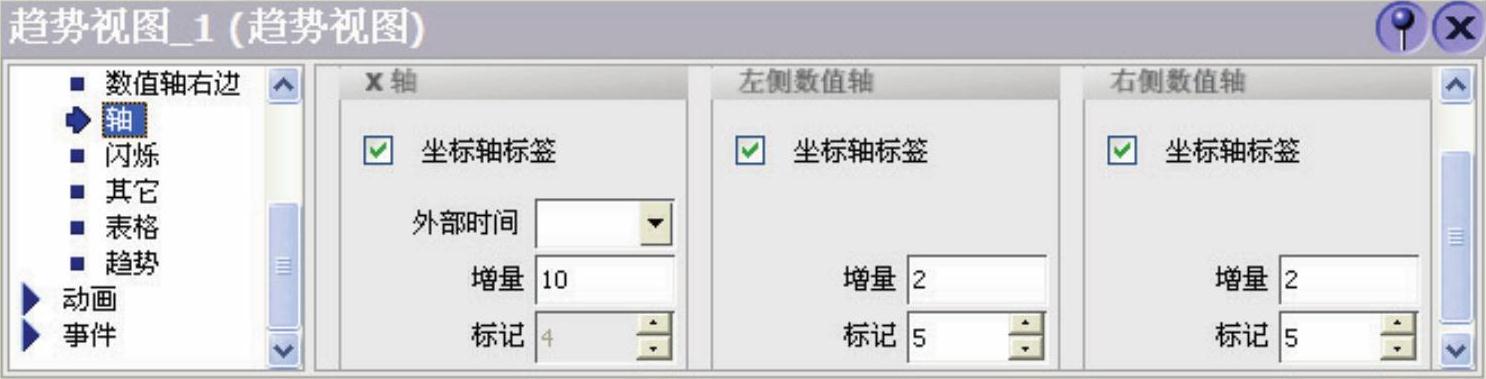
图9-8 组态趋势图视图轴的刻度和显示的数字
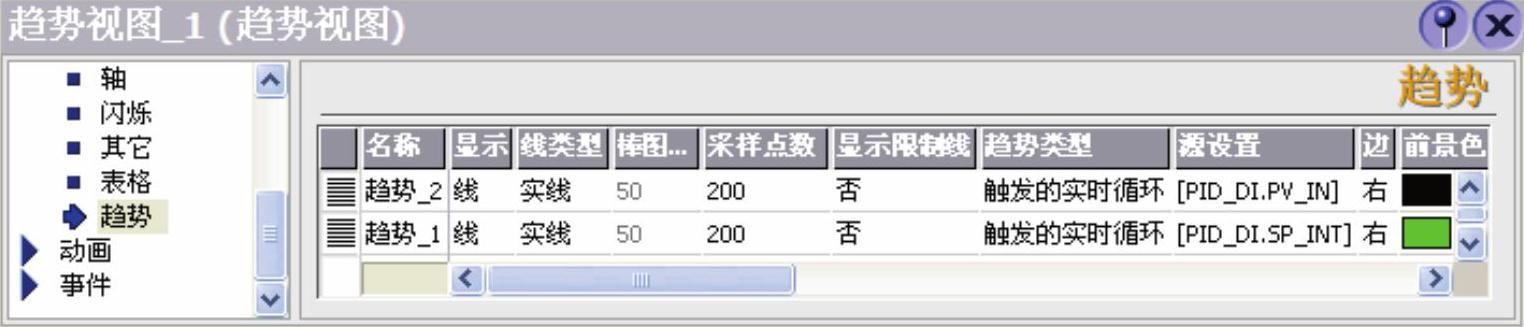
图9-9 组态趋势视图的趋势曲线
趋势视图用绿色实线显示给定值曲线,用黑色实线显示系统的输出变量的曲线。
6.生成文本域和IO域
将工具箱中标有“A”的文本域图标(见图8-9)拖放到画面上。选中生成的文本域,打开属性视图中的“常规”对话框,在右边的文本框中输入文本“比例系数”(见图9-10)。
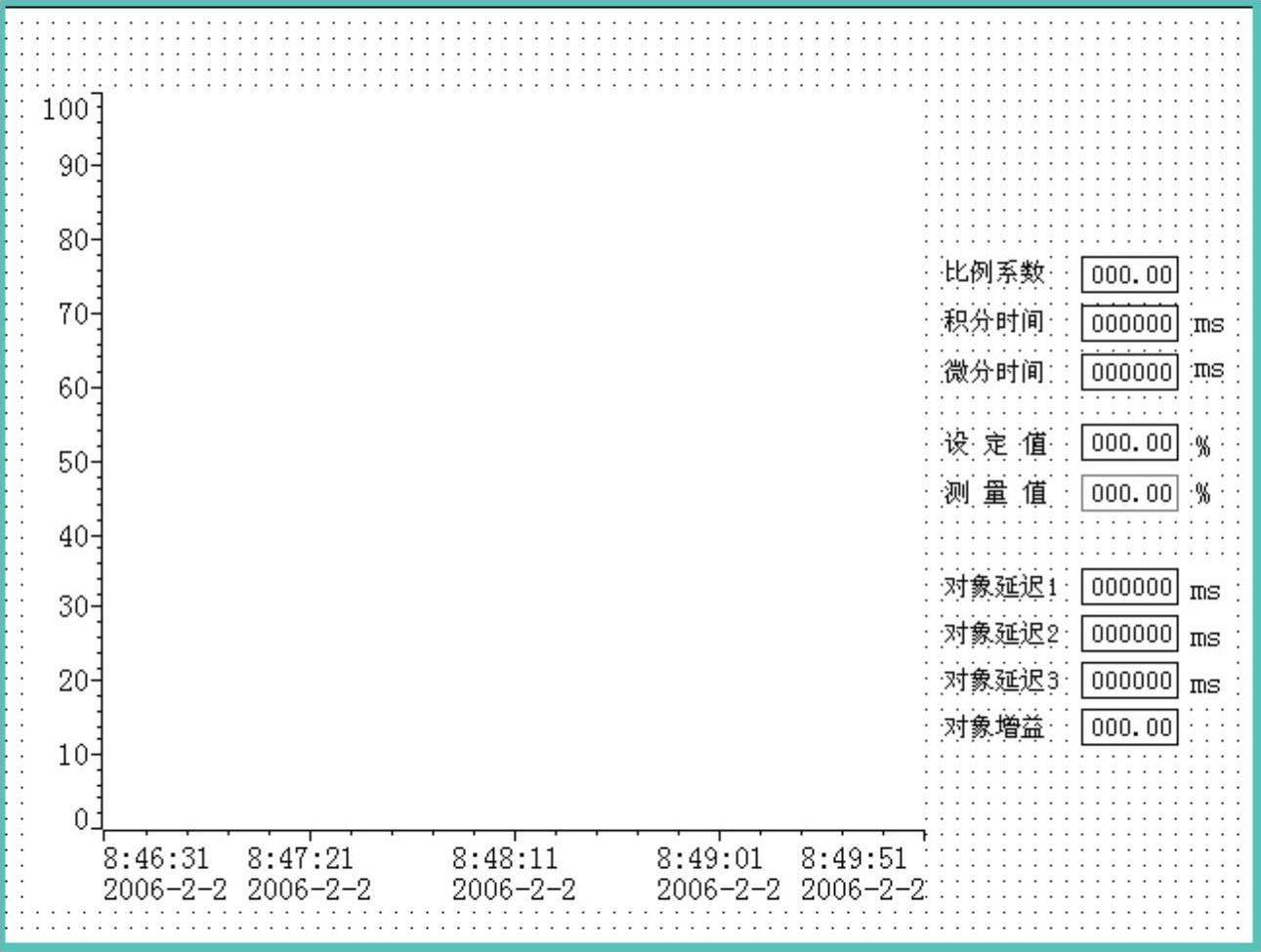
图9-10 调试PID参数的画面
将工具箱中的IO域图标 拖放到画面上“比例系数”文本域的右边,选中生成的IO域,在属性视图的“常规”对话框(见图8-21),设置IO域为输入/输出域,连接的变量为“PID_DI.GAIN”(PID控制器的增益),格式为默认的“十进制”,“格式样式”为999.99(3位整数、2位小数)。在“属性”的“外观”对话框,设置边框的样式为“实心的”(有边框)。
拖放到画面上“比例系数”文本域的右边,选中生成的IO域,在属性视图的“常规”对话框(见图8-21),设置IO域为输入/输出域,连接的变量为“PID_DI.GAIN”(PID控制器的增益),格式为默认的“十进制”,“格式样式”为999.99(3位整数、2位小数)。在“属性”的“外观”对话框,设置边框的样式为“实心的”(有边框)。
用复制和粘贴操作,生成下列文本域和IO域(见图9-10):
1)文本域“设定值”和它右边用于显示PID控制器设定值SP_INT的输出域,其单位为百分数。
2)文本域“测量值”和它右边用于显示过程变量PV_IN的输出域,其单位为百分数。
3)文本域“对象增益”和它右边用于修改被控对象增益GAIN的输入/输出域。
在画面上生成文本域“积分时间”和它右边用于修改积分时间TI的输入/输出域,格式为默认的“十进制”,“格式样式”为999999(6位整数,单位为ms),有边框。在IO域的右边,生成文本域“ms”。
用复制和粘贴操作,生成输入微分时间和对象延迟时间的输入/输出域,以及对应的文本域。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。