



前馈补偿解耦控制是根据不变性原理来设计解耦控制器的,从而消除系统的相互关联。图8-15所示为双变量前馈补偿解耦控制系统。

图8-15 双变量前馈补偿解耦控制系统
要实现对Uc1与Y2、Uc2与Y1之间的解耦,根据前馈补偿原理可得

因此,前馈补偿解耦控制器的传递函数为

前馈补偿解耦后,图8-15所示的耦合系统将变为两个单回路控制系统。前馈补偿解耦与对角阵解耦具有相同的解耦效果,但前馈补偿解耦模型较简单,易于实现。另外,前馈补偿解耦还可以实现对扰动信号的解耦,前馈补偿解耦法是目前工业过程控制中应用最普遍的一种解耦方法。
例如已知双输入双输出耦合控制系统如图8-16所示。试设计解耦控制器。
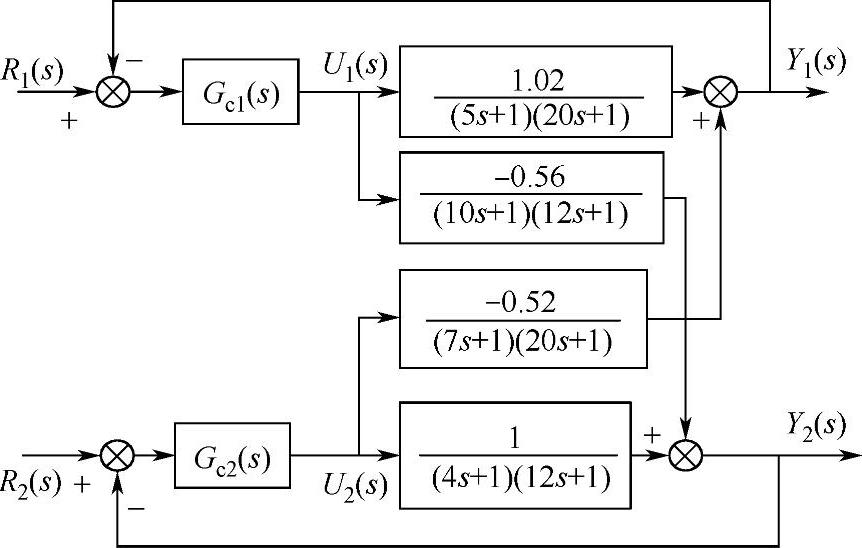
图8-16 双输出耦合控制系统
解:由图8-16可知,被控对象的传递函数矩阵为
 (https://www.xing528.com)
(https://www.xing528.com)
首先对系统进行耦合分析:由被控对象的传递函数矩阵得系统静态放大系数矩阵为

K即为系统的第一增益系数矩阵。

系统相对增益矩阵为

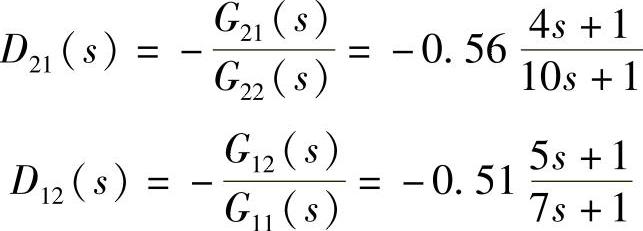
由相对增益矩阵看到,系统通道之间存在严重耦合,且系统输入与输出的配对正确。系统采用前馈补偿解耦法进行解耦设计。
根据式(8-15),前馈补偿控制器为
采用前馈补偿解耦后,系统变为两个独立的单输入单输出系统,为了保证系统无稳态误差,控制器采用PI控制,参数整定为KP1=6、TI1=50、KP2=4、TI2=37。为了说明前馈补偿解耦正确性,我们对无耦合系统、耦合系统和前馈补偿解耦系统仿真研究,图8-17所示为系统采用前馈补偿解耦的Simulink仿真框图。图8-18a所示依次为系统无干扰时第一通道对应单回路输出、前馈解耦输出、第二通道对应单回路输出、前馈解耦输出;图8-18b所示为系统施加0.2的随机干扰时的干扰信号、第一通道对应单回路输出、前馈解耦输出、第二通道对应单回路输出、前馈解耦输出。
从图上可以明显看到,采用前馈解耦不仅可以做到将耦合系统等效为单回路控制系统,同时前馈解耦系统的抗干扰能力、反应速度等也大大提高。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。