



反馈控制系统,无论是什么干扰引起系统被控量的变化,系统控制器均是按照偏差的大小和方向进行调节的。但是从干扰产生到被控量发生变化,以及偏差产生相应的控制作用,再由控制信号改变到被控量发生变化,都需要一定的时间。所以,反馈控制总是落后于干扰作用,导致反馈控制无法将干扰克服在被控量偏离设定值之前。对于滞后较大的被控对象来说,控制作用不及时,从而大大限制了控制质量的提高。
前馈控制是按照扰动量的变化进行控制的。其控制原理是,当系统出现干扰时,控制器就直接根据测量得到的干扰大小和方向求出相应的控制信号,以抵消或减小扰动对被控变量的影响。由于干扰发生后,在被控量还没有发生变化之前,控制器就产生了控制作用,使被控变量不发生偏差。按照这种理论构成的控制系统,称为前馈控制系统。
为说明前馈控制和反馈控制的区别及特点,以图7-1所示热交换器的控制为例进行分析。
1.热交换器的反馈控制
为控制热交换器出口温度的恒定,组成如图7-1所示的温度反馈控制系统。当扰动(如进料流量或温度变化、蒸气压力变化等)发生后,均会影响热交换器的出口温度,使其偏离设定值,产生偏差信号。经反馈控制器运算,输出信号改变控制阀的开度,调节蒸气的流量,从而克服扰动对被控变量的影响。系统采用闭环控制方式可以克服多个扰动的影响,适应性强,但是反馈控制利用偏差纠正偏差,所以控制的及时性较差。
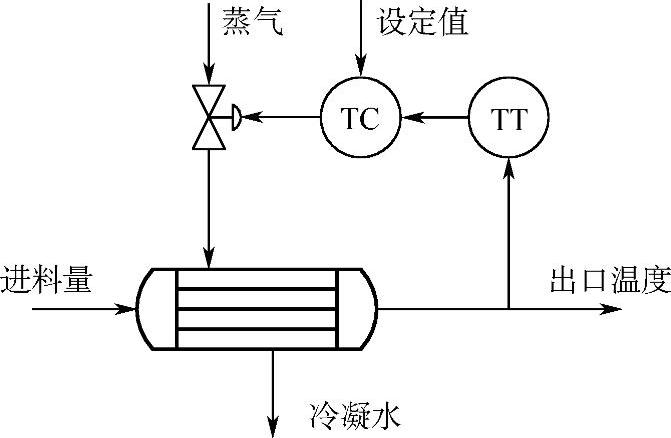
图7-1 热交换器的反馈控制
反馈控制系统的Simulink仿真图如图7-2所示,给定信号单独作用下系统的单位阶跃响应如图7-3a所示,系统稳定后突加5%的干扰信号系统的输出响应如图7-3b所示,系统对干扰作用下的超调量达到50%,动态调节时间为2030s,控制的动态特性较差。
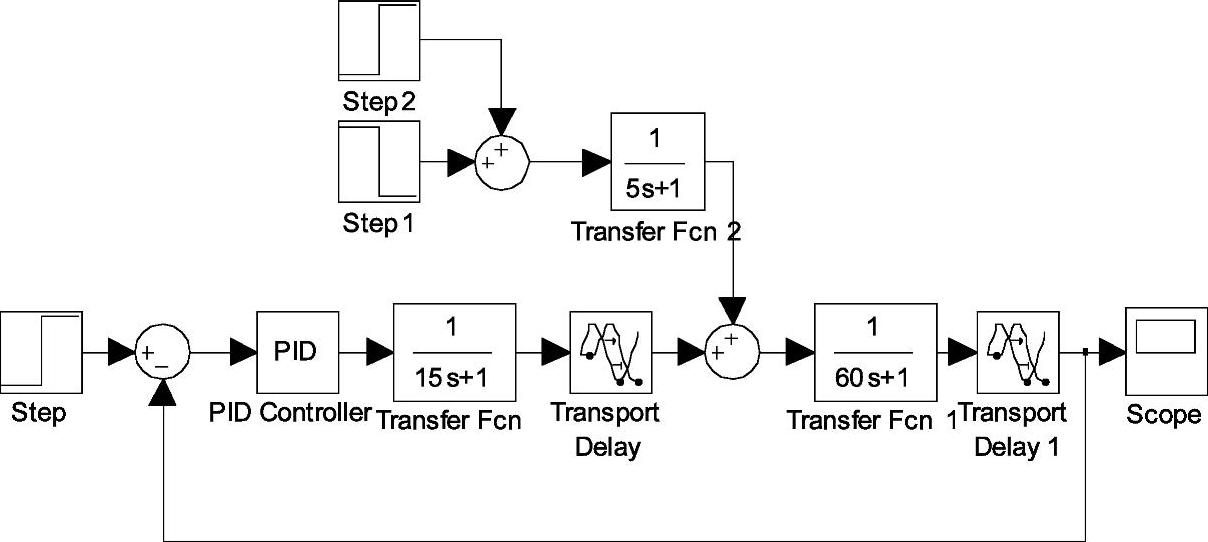
图7-2 反馈控制系统的Simulink仿真图
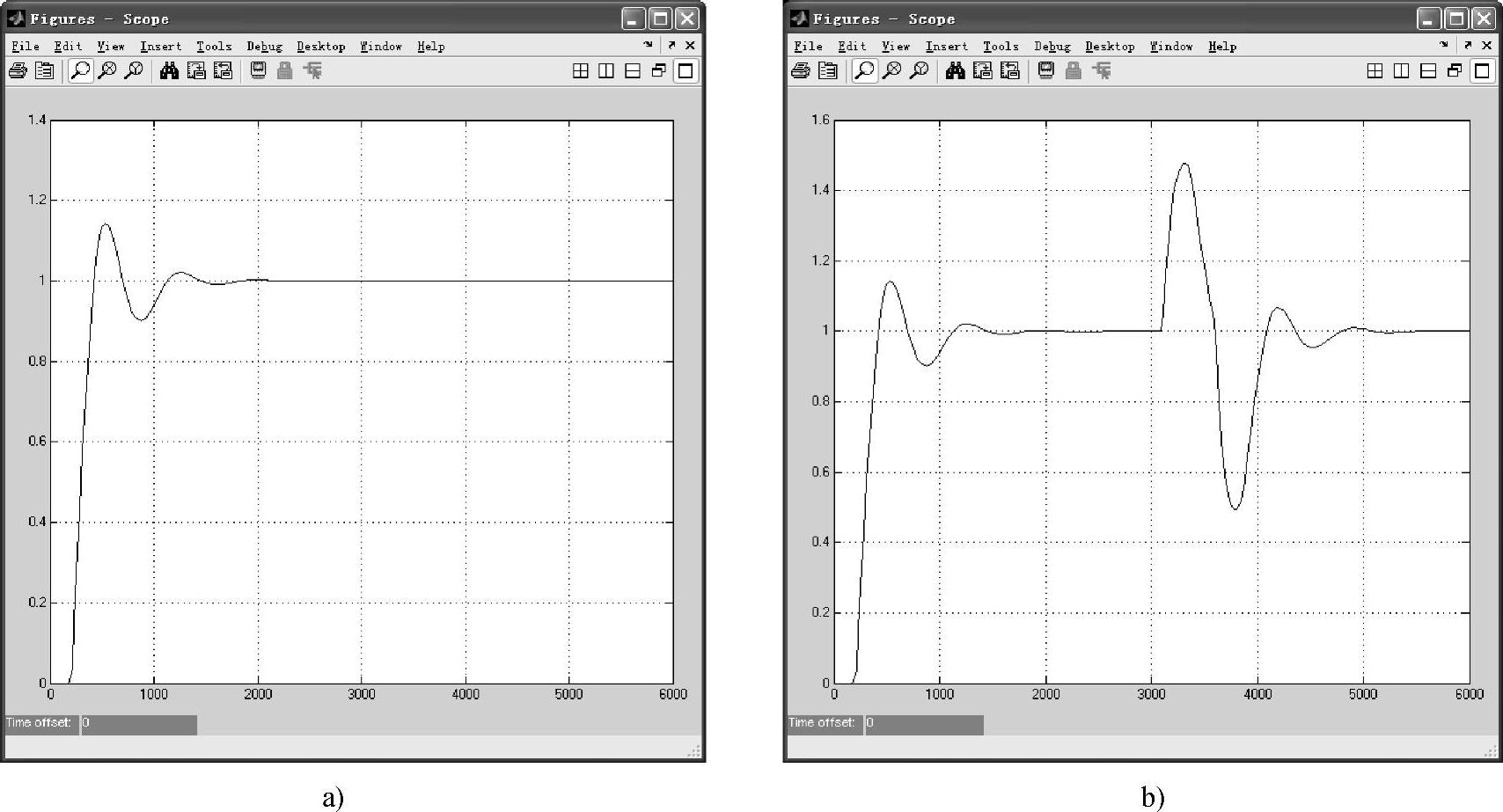
图7-3 系统的单位阶跃响应曲线
a)给定值单独作用 b)给定值和扰动同时作用
2.热交换器的前馈控制
如果系统的进料流量是影响被控变量的主要扰动,采用如图7-1所示的反馈控制系统,系统可能出现较大的动态偏差。为此,构成如图7-4所示的前馈控制,即将原料流量作为测量信号。当原料流量增加时,出口温度下降,通过前馈控制器将蒸气控制阀打开,使出口温度上升。如果前馈控制器的控制规律合适,可以使出口温度保持不变。这样,在扰动尚未影响到被控变量前,系统就提前调节以补偿扰动对被控变量的影响。前馈控制根据扰动进行调节,采用开环控制方式,控制器的输入信号只有一个变量,即扰动量,只能克服某一特定扰动的影响,不能保证被控变量没有偏差。另外,如果扰动不可测量就不能采用前馈控制。(https://www.xing528.com)
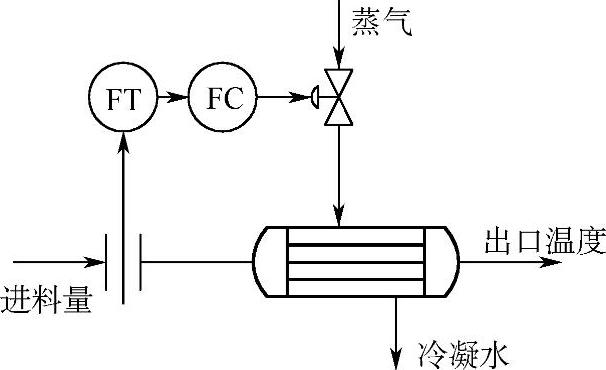
图7-4 热交换器的前馈控制
图7-5所示为换热器前馈控制系统的框图。
图7-5中,G0(s)为前馈控制广义对象的传递函数,Gd(s)为干扰通道的传递函数,Gff(s)为前馈控制器的传递函数,N(s)为扰动信号,Y(s)为系统的输出量。
系统在扰动作用下的输出量为
Y(s)=Gd(s)N(s)+Gff(s)G0(s)N(s) (7-1)
系统对干扰实现完全补偿(即干扰对被控变量无影响)的条件为
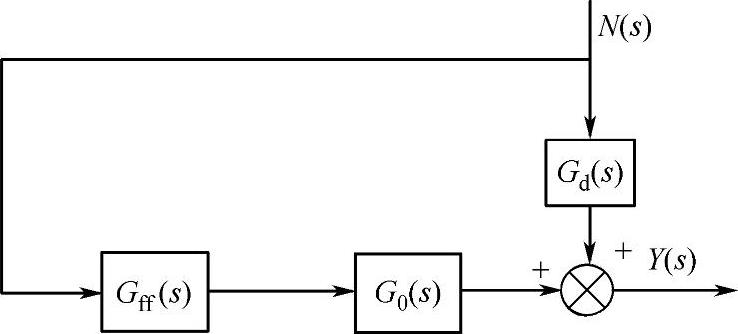
图7-5 换热器前馈控制系统的框图
Gd(s)+Gff(s)G0(s)=0 (7-2)
由式(7-2)得到前馈控制器的传递函数为

当广义对象的传递函数G0(s)和干扰通道的传递函数Gd(s)已知时,根据式(7-3)可得到前馈控制器的控制规律算式。如果该算式可以精确实现,则系统干扰对被控变量没有影响,系统实现了完全补偿。但是,实际上完全补偿几乎是难以做到的,因为要准确地确定过程扰动通道的传递函数Gd(s)及广义被控对象的传递函数G0(s)均是不容易的,而且被控对象中常常包含非线性特性、生产过程中可能有多个扰动等,导致前馈控制器的传递函数Gff(s)难以准确,即使前馈控制器模型能准确求出,工程上也难以实现。例如G0(s)=e-30s/(15s+1),Gd(s)=1/5s+1,则Gff(s)=-Gd(s)/G0(s)=-(15s+1)e30s/(5s+1),前馈控制器为一超前装置,工程上很难实现。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。