



丁烯洗涤塔的任务是用洗涤水除去丁烯馏分所夹带的微量乙醇。为了保证洗涤质量,要求根据进料量配以一定比例的洗涤水量。为此,构成单闭环比值控制系统原理如图6-7所示。

图6-7 丁烯洗涤塔进料与洗涤水的比值控制
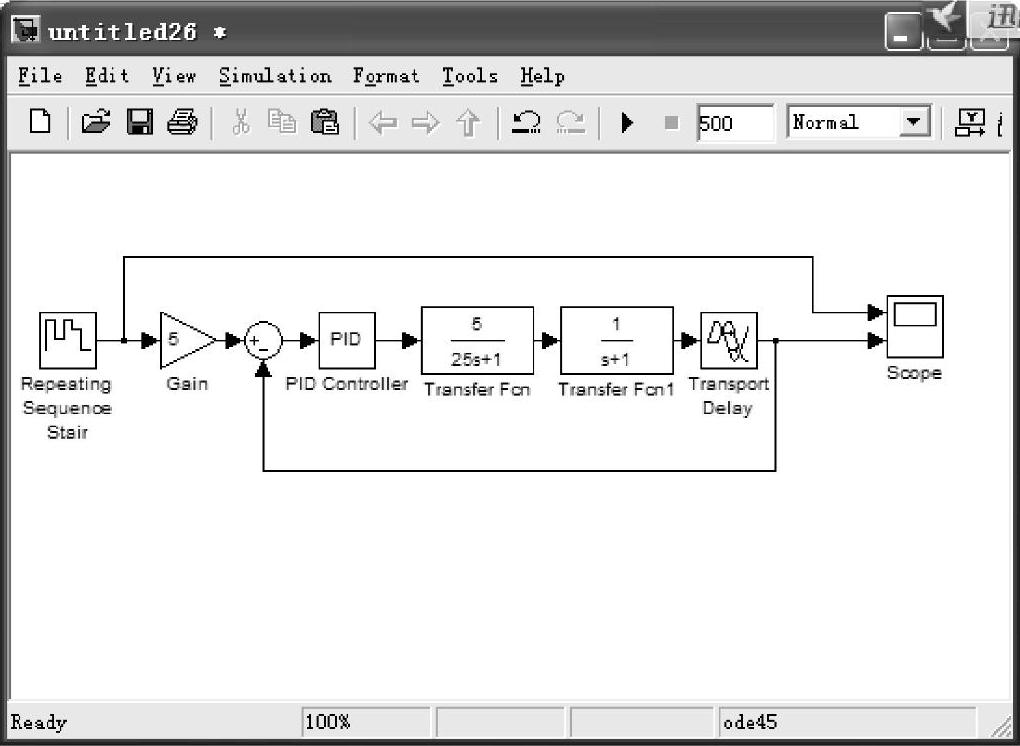
图6-8 单闭环系统Simulink仿真图
采用系统辨识的方法得副流量对象(洗涤水)的数学模型近似为二阶惯性加纯滞后,即G(s)=5e-8s/[(25s+1)(s+1)],采用Repeating Sequence Stair阶梯序列信号来模仿主动量的变化,其参数输出幅值矢量和采样时间分别设置为[42431]和100,两流量的比值为5。从工艺要求考虑从动量控制器选择为PI控制规律,单闭环系统Simulink仿真图如图6-8所示。采用工程整定法得PID控制器的参数KP=0.568,TI=126,从动量单闭环系统在的阶跃响应曲线如图6-9a所示。
此时系统的超调量高达52%,为了使从动量能迅速、准确地跟踪主动量变化,应将从动量回路的过渡过程整定成非周期状态为最佳,此时KP=0.27,TI=91,系统的输出响应曲线如图6-9b所示。(https://www.xing528.com)
单闭环比值控制系统从动量受幅值为0.3的随机干扰时Simulink仿真框图如图6-10所示,主动量仍采用Repeating Sequence Stair阶梯序列信号来模仿。

图6-9 从动量单闭环系统的输出响应曲线
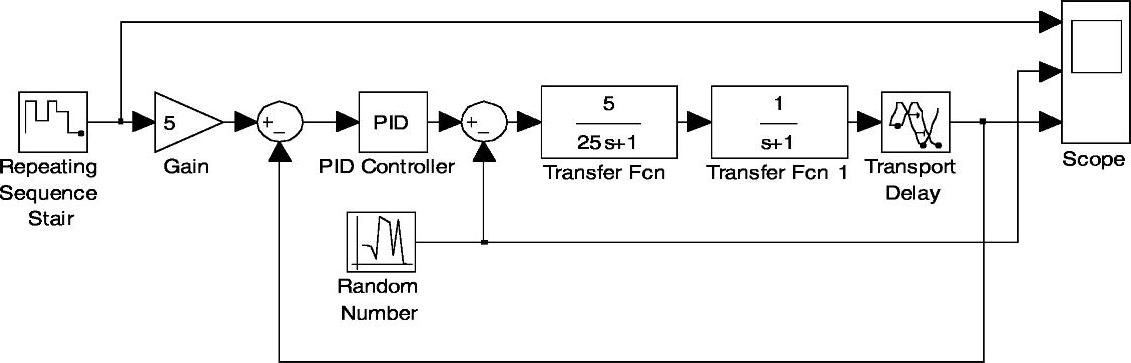
图6-10 单闭环比值控制系统Simulink仿真框图
单闭环比值控制系统的输出响应曲线如图6-11所示,图中从上到下依次为主动量的设定信号、从动量的干扰信号及从动量跟踪主动量的变化曲线。由图可见从动量能较好地跟踪主动量的变化而变化,并基本维持比值5,有效地克服了从动量扰动的影响。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。