



【摘要】:根据经验先确定副控制器的比例度,然后按单回路控制系统的整定方法整定主控制器参数的整定方法称为一步整定法。整个回路等效的放大系数等于主控放大系数与等效副回路的放大系数的积,即Kc=Kc1Kc2,主变量产生4∶1衰减振荡过程,则Kc为某一定值,Kc1和Kc2允许在一定范围内任意搭配。3)若整定过程中系统出现“共振”,只需加大主、副控制器中任一比例度的值即可。
根据经验先确定副控制器的比例度,然后按单回路控制系统的整定方法整定主控制器参数的整定方法称为一步整定法。
工程实际中发现,在被控对象特性一定的情况下,为得到主变量的4∶1衰减振荡过程,主、副控制器的放大系数Kc1和Kc2可在一定范围任意搭配,相互关系近似满足Kc1Kc2=常数,此时控制系统的品质基本相同。这样就可以依据经验,先将副控制器的参数确定一个数值,然后按一般单回路控制系统控制器的整定方法整定主控制器的参数。虽然按经验一次得到的副控制器参数不一定很合适,但可以通过调整主控制器的放大系数得到补偿。
从理论上来看:串级控制中,如果把副回路等效看成一个完成“粗调”任务的控制器,那么整个串级控制系统可看成两个控制器串联的单回路控制系统。整个回路等效的放大系数等于主控放大系数与等效副回路的放大系数的积,即Kc=Kc1Kc2,主变量产生4∶1衰减振荡过程,则Kc为某一定值,Kc1和Kc2允许在一定范围内任意搭配。
一步整定法的步骤为:
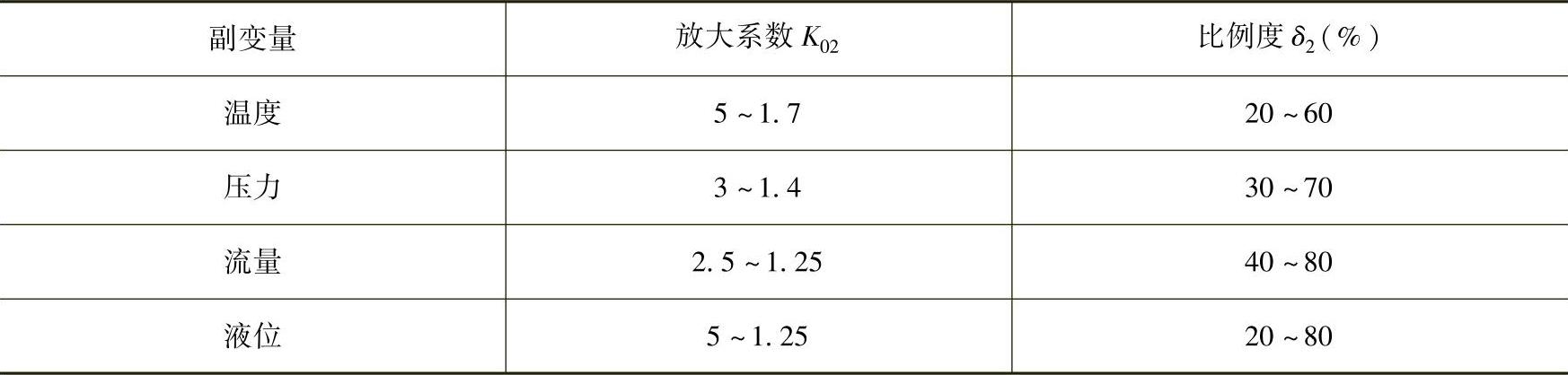
1)按表5-2的经验值选择副控制器的一个合适的比例度,使副回路按纯比例控制运行;(https://www.xing528.com)
2)系统投入串级控制运行状态,按单回路系统参数整定的方法对主控制器参数整定,观测响应曲线,根据K值匹配原理适当调整主控制器参数,直到主变量的控制品质达到最佳。
3)若整定过程中系统出现“共振”,只需加大主、副控制器中任一比例度的值即可。
表5-2 副控制器比例度取值范围
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。