



与模拟PID控制算法相比较,数字控制算法具有下列特点:
1)P、I、D三种控制作用是独立的,没有控制器参数之间的关联。
2)由于不受硬件电路的制约,数字式控制器的参数可在更大范围内设置。
3)数字控制器采用采样控制,引入采样周期,即引入一个纯时滞为Ts/2的滞后环节,使控制系统品质变差。
4)由于数字控制系统引入滞后Ts/2,因此,数字控制器的控制效果不如模拟控制器,用控制度表示模拟控制与数字控制品质的差异程度。控制度定义为

式中 DDC——直接数字控制;
ANA——模拟连续控制;
min(ISE)——最小平方误差积分指标。
 (https://www.xing528.com)
(https://www.xing528.com)
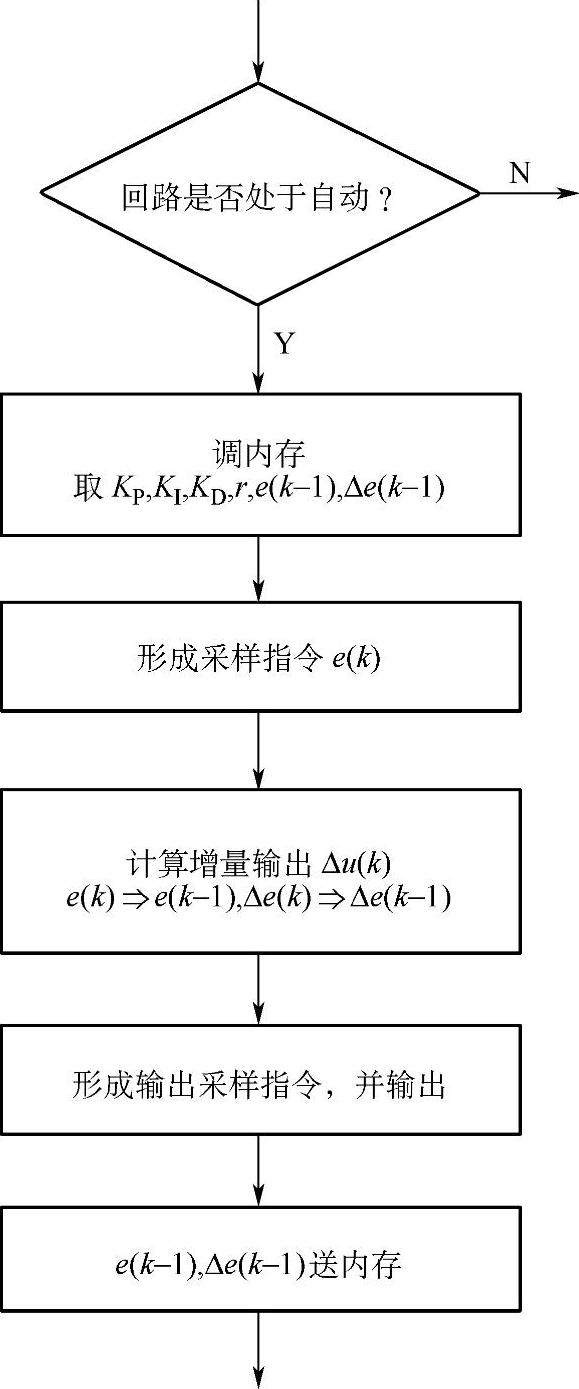
图3-24 数字式PID增量式控制算法程序框图
控制度越大,表示数字控制系统的控制品质越差。系统的控制度与采样周期Ts有关。此外,控制度还与被控对象的时间常数、时滞有关。
5)采样周期大小的选择影响数字控制系统的控制品质。
在数字式PID控制算法的使用过程中,必须考虑采样周期Ts对系统的影响。香农采样定理从理论上给出了采样周期的上限,即Ts<π/ωmax,其中ωmax是连续信号的最大频谱。从控制性能考虑,采样周期应尽可能短,这样不仅控制效果好,而且可采用模拟PID控制参数的整定方法。但采样周期越短,对计算机的运行速度和存储容量要求越高。从执行机构的特性要求来看,由于过程控制系统常采用气动或电动调节阀,其响应速度较低,如果采样周期过短,执行机构来不及响应,则无法达到控制目的,所以采样周期也不能过短。
另外,采样周期的选择还应考虑被控对象的特性,即时间常数T和纯滞后时间τ。当纯滞后时间τ=0或τ<0.5T时,可选Ts=0.1T~0.2T;当τ>0.5T时,可选Ts≈τ。
有时也可根据被控对象的类型选择采样周期Ts,见表3-1。
实际中采样周期的最终选定除了进行上述考虑外,还要通过现场试验确定最合适的采样周期。
表3-1 根据被控对象类型选择采样周期

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。