



【摘要】:图3-22给出了同一系统在相同阶跃信号作用下,采用不同PID参数的系统响应曲线。假设系统模型为G0=10/(s+1)(s+2)(s+3)(s+4),采用PID控制策略,研究在不同的PID参数下,闭环系统阶跃响应的曲线如图3-22所示。综合考虑PID同时作用时的控制效果最佳,但是这并不意味着对不同的被控对象在任何情况下采用三种组合调节作用都是合理的。
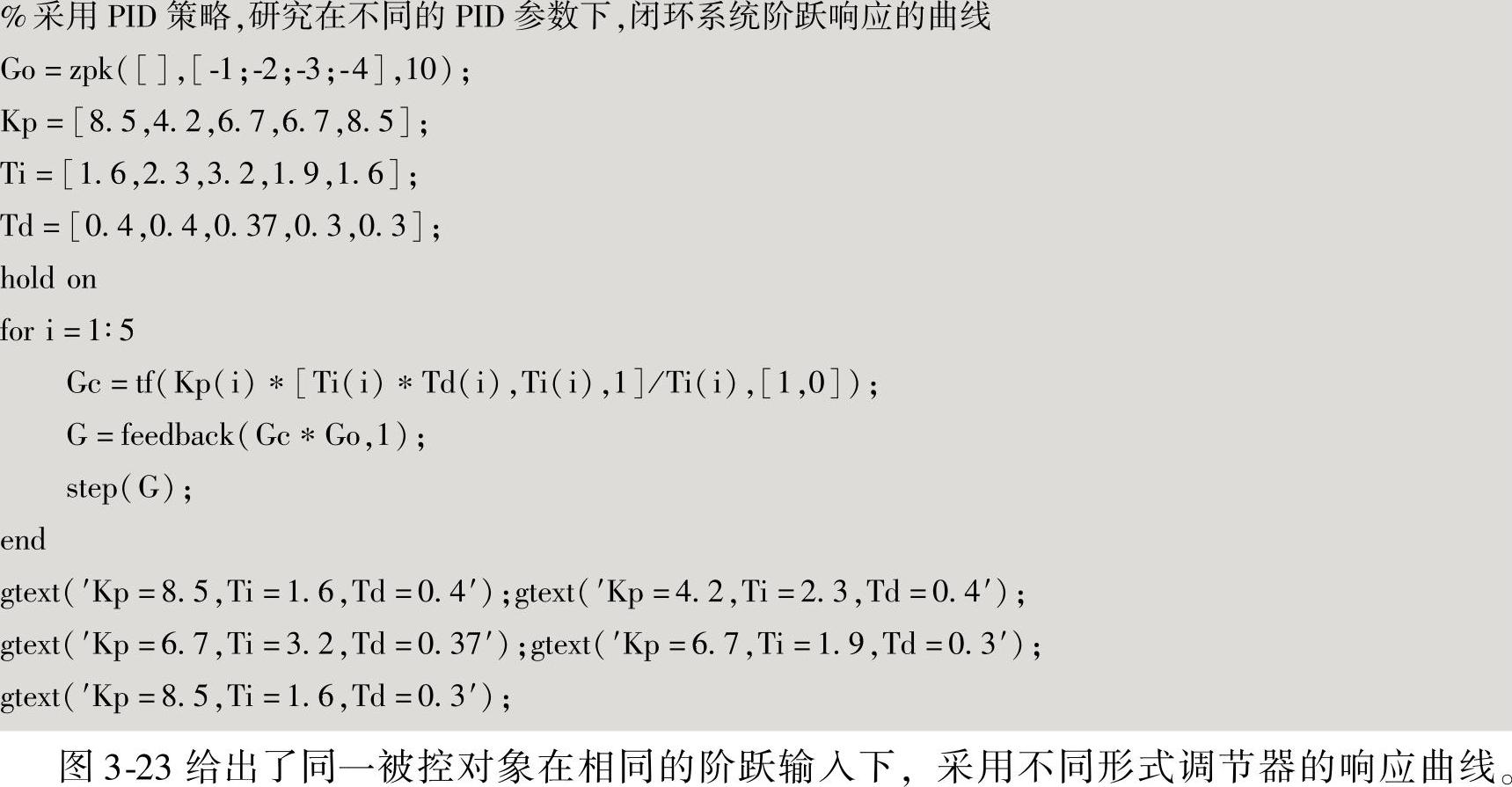
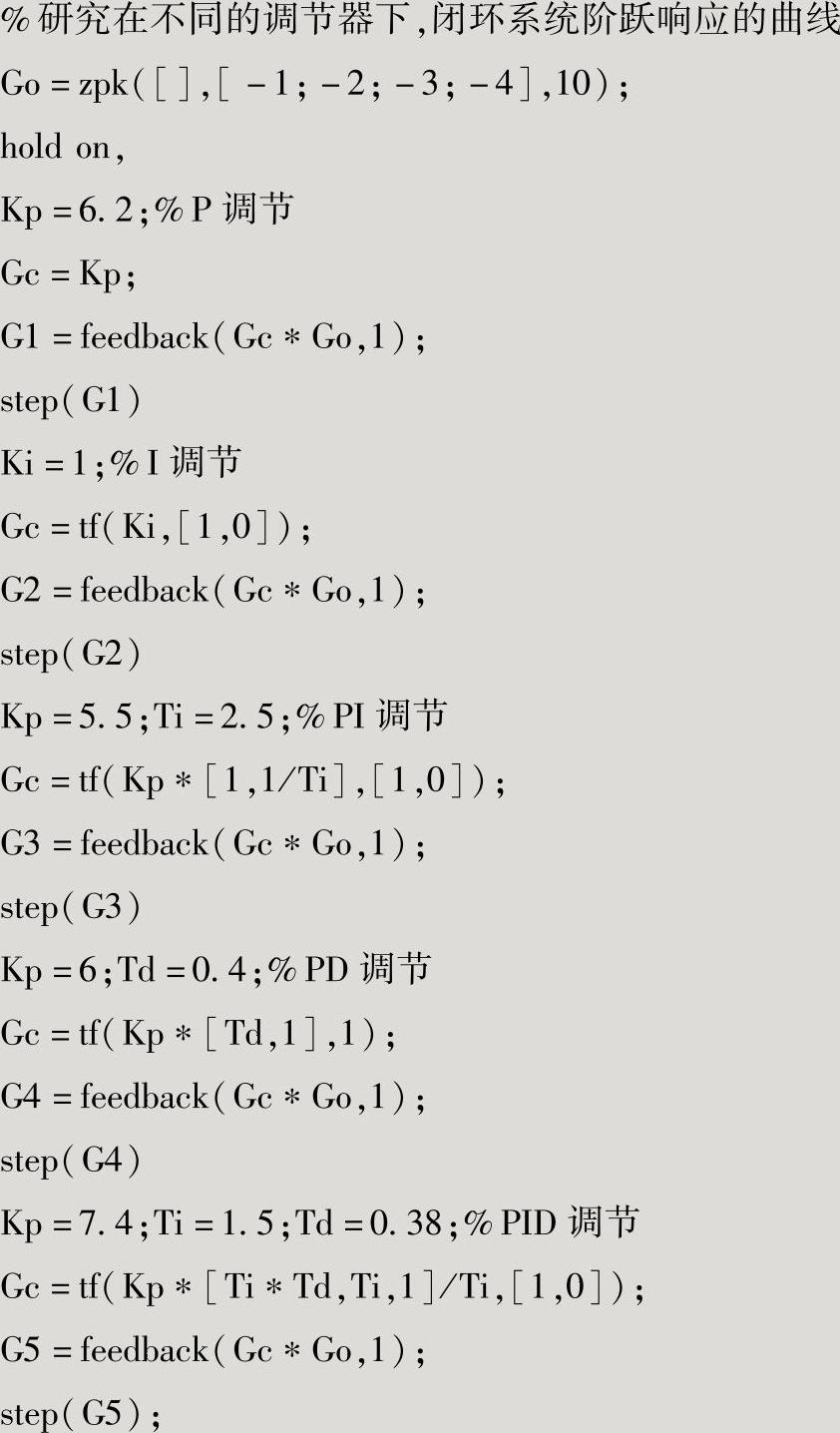
图3-22给出了同一系统在相同阶跃信号作用下,采用不同PID参数的系统响应曲线。假设系统模型为G0(s)=10/(s+1)(s+2)(s+3)(s+4),采用PID控制策略,研究在不同的PID参数下,闭环系统阶跃响应的曲线如图3-22所示。
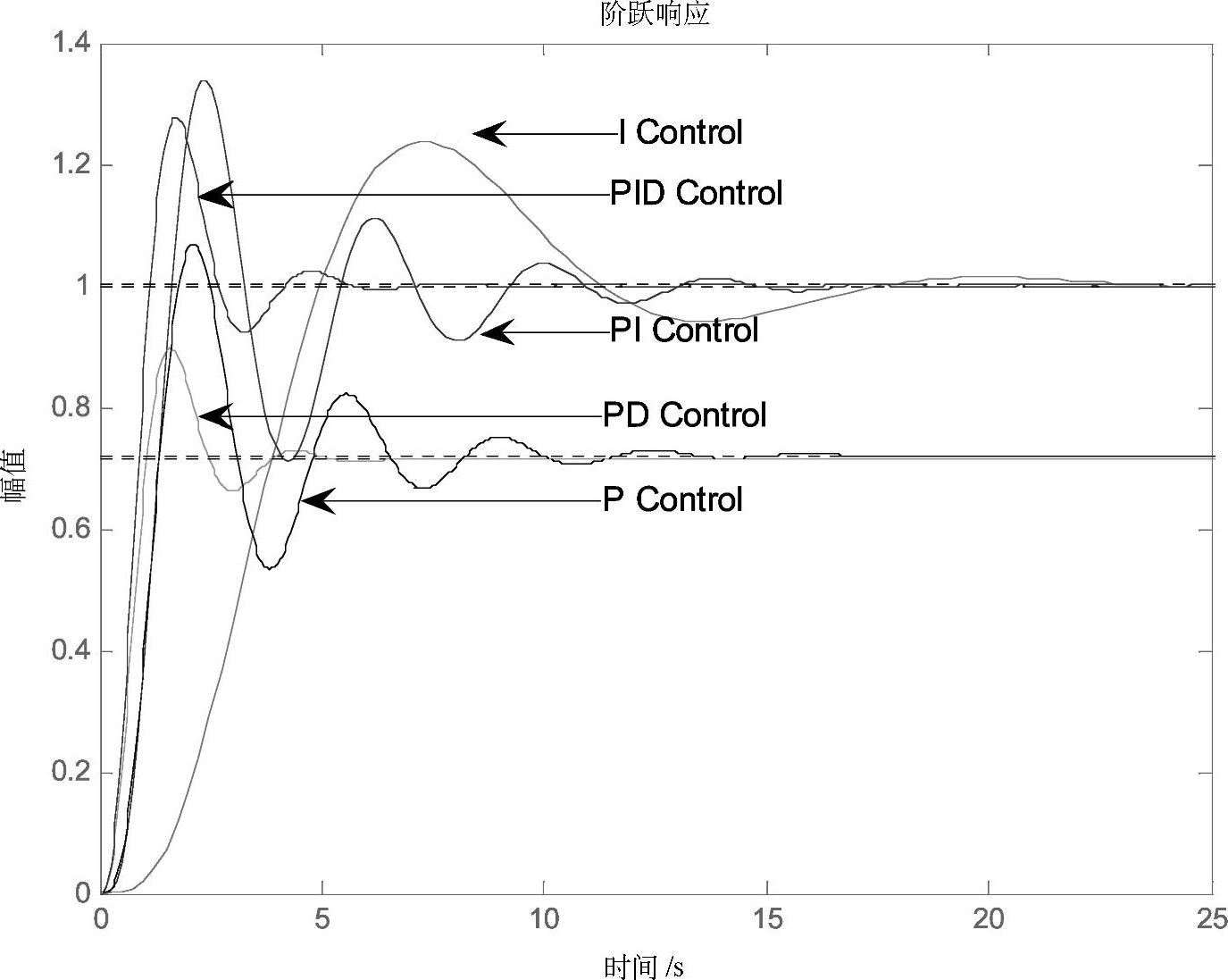
系统模型为G0(s)=10/(s+1)(s+2)(s+3)(s+4),研究在不同的调节器下闭环系统阶跃响应的曲线如图3-23所示。
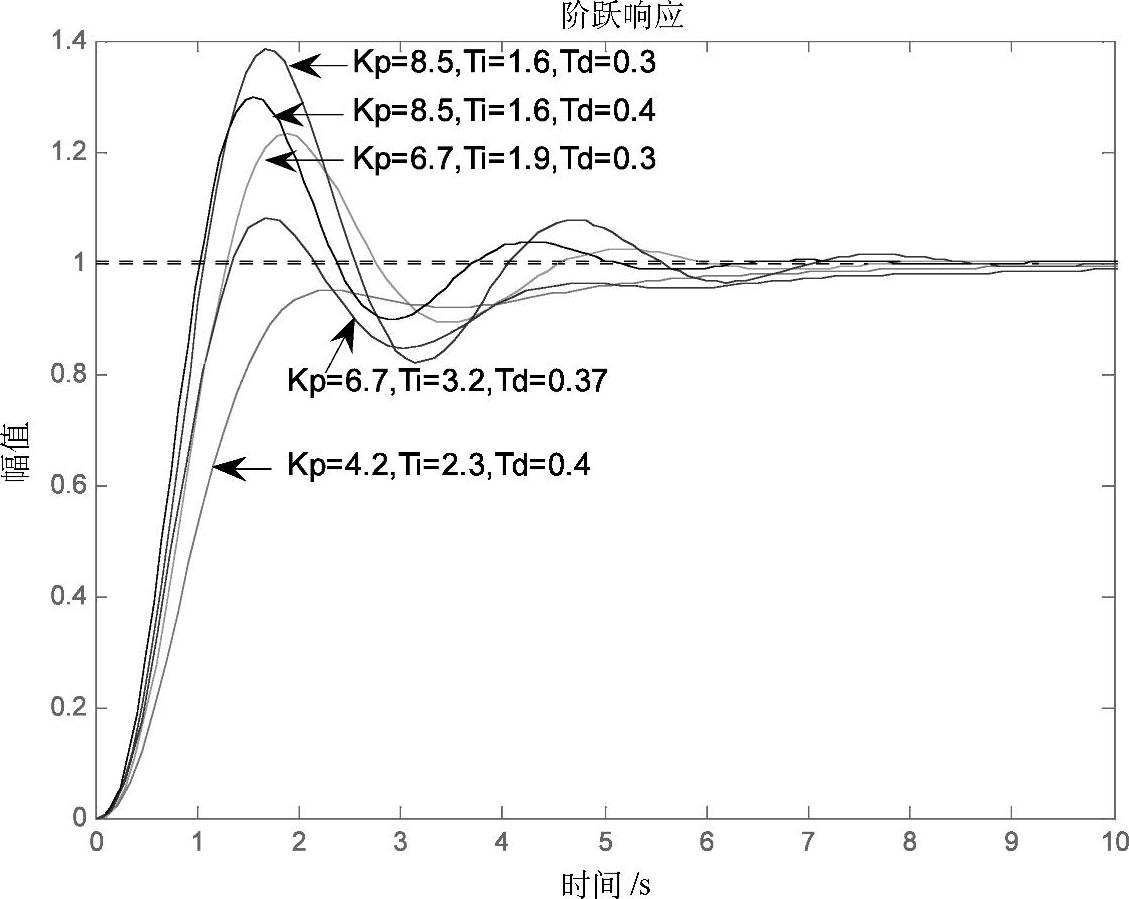
图3-22 不同参数下PID的响应曲线
 (https://www.xing528.com)
(https://www.xing528.com)
图3-23 采用不同调节器的响应曲线
由图3-22和图3-23可以看到,PD调节器作用下系统的动态偏差最小,由于有微分作用,可使比例增益增大,调节时间大大缩短,但因无积分作用,系统仍有余差,只是比例增益增大,余差只是比例调节的一半左右;对于PID调节,系统动态最大偏差比PD调节稍差,但由于积分作用,系统无余差,但由于积分作用,使系统的振荡周期增长了。综合考虑PID同时作用时的控制效果最佳,但是这并不意味着对不同的被控对象在任何情况下采用三种组合调节作用都是合理的。如果P、I、D调节器的参数选择不合适,则不仅不能发挥各自调节器的有效作用,还会适得其反。
通常,选择哪一种控制规律的调节器与被控对象的特性、负荷变化、系统的主要扰动和系统的控制指标要求等有关,同时还要考虑实际系统的经济性以及系统运行的方便性。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。