



1.比例调节对系统的干扰有及时而有力的抑制作用
典型的反馈控制系统如图3-2所示。
系统在阶跃扰动信号n(t)=F×1(t)的作用下,对于具有自平衡能力的被控对象,即
G1(s)=K01
H(s)=1
Gc(s)=KP
系统的余差为
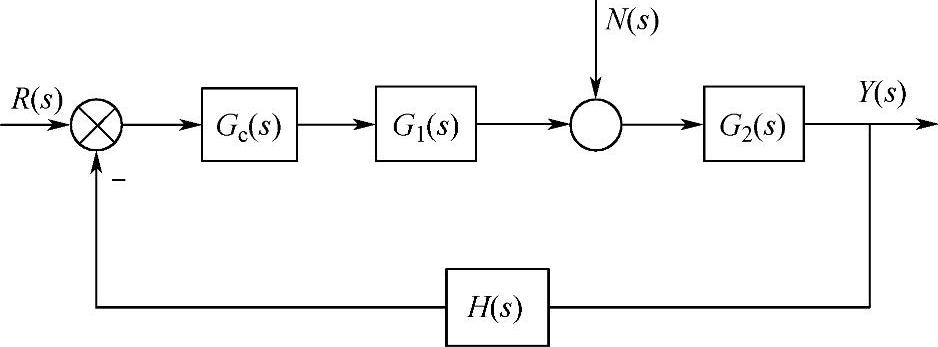
图3-2 典型的反馈控制系统结构图
由此,比例调节器的比例值越大,扰动作用下的余差越小,系统抑制干扰的能力越强。对于具有自平衡能力的被控对象,假设G1(s)=e-180s/(360s+1)、G2(s)=8、F=100、Gc(s)=KP,采用比例控制,在不同比例值下,扰动作用下系统的输出响应曲线如图3-3a所示,假如被控对象的延迟比较大,即G1(s)=e-360s/(360s+1)、G2(s)=8、F=100、Gc(s)=KP,在扰动作用下的响应曲线如图3-3b所示。
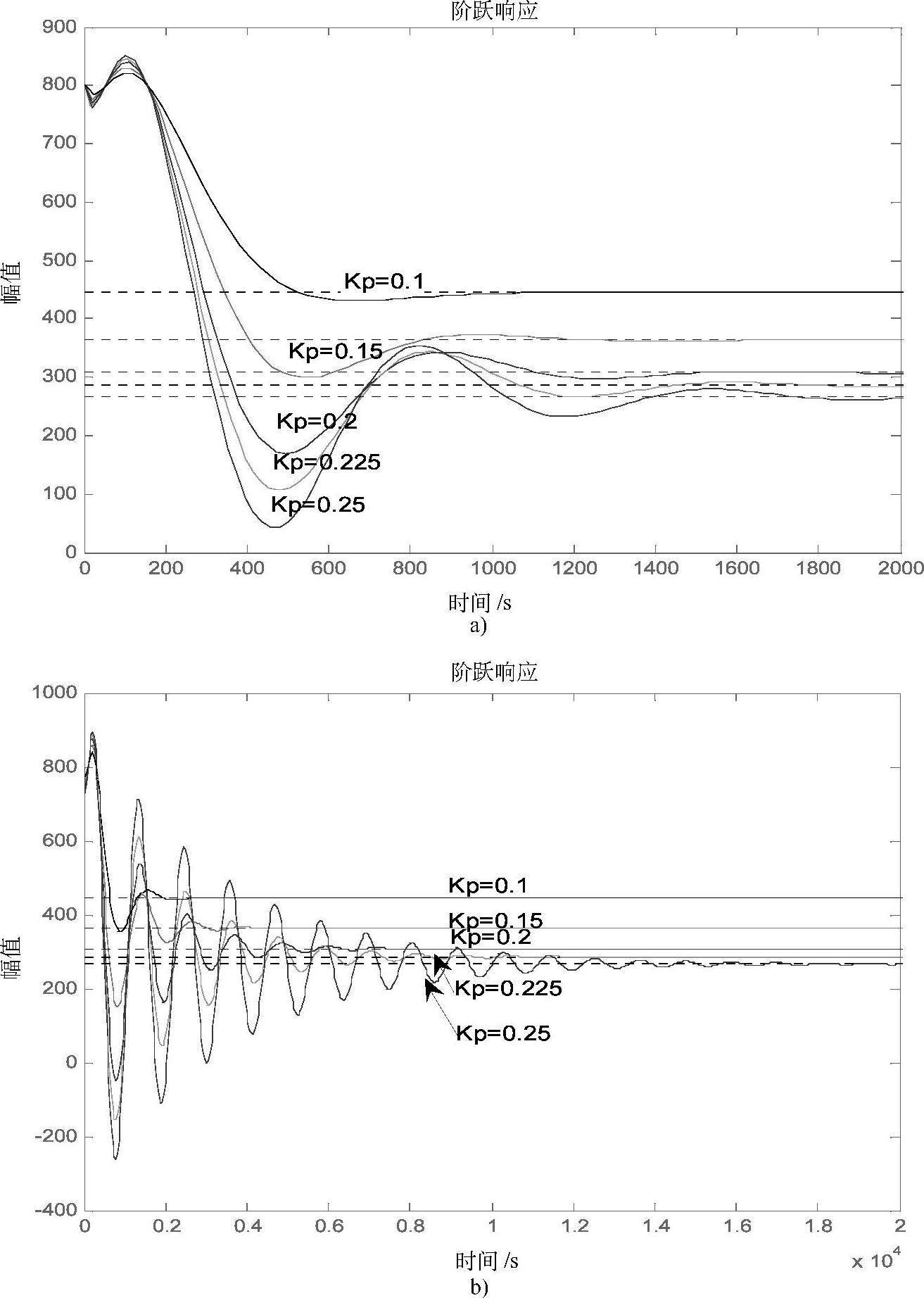
图3-3 扰动作用下系统的输出响应曲线
2.比例调节存在有余差,不能做无静差调节
(1)自平衡被控对象比例控制器存在稳态偏差(余差)
具有自平衡的被控对象,如图3-4所示。
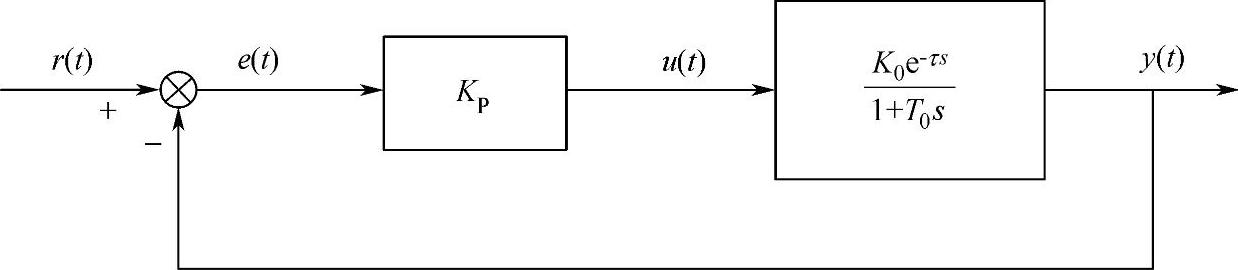
图3-4 自平衡被控对象系统结构图
假设系统输入为幅值R的阶跃输入,即
r(t)=R×1(t) (3-8)
则控制系统的稳态偏差(余差)为
 (https://www.xing528.com)
(https://www.xing528.com)
由式(3-9)可以看到,控制器的比例值越大,控制系统的稳态误差越小,但比例控制系统总存在稳态偏差,不能做无静差调节。
(2)非自平衡被控对象比例控制器不存在稳态偏差
对于具有非自平衡的被控对象,系统结构如图3-5所示。
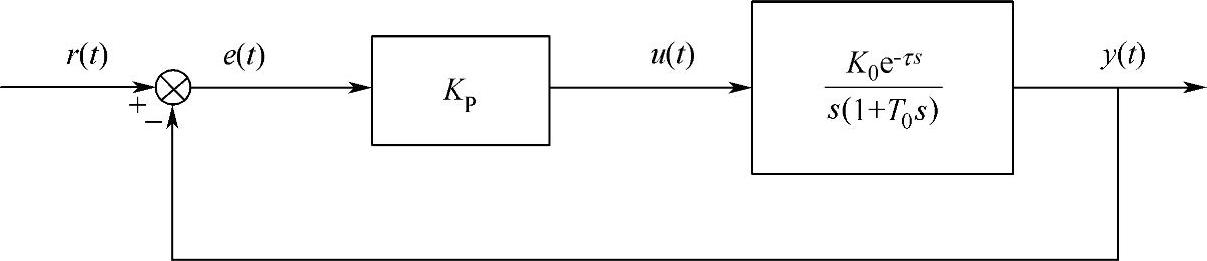
图3-5 非自平衡被控对象系统结构图
设定值阶跃输入导致的稳态偏差(余差)为
当被控对象具有非自平衡特性时,由于存在积分,控制系统在阶跃作用下稳态偏差(余差)为零。单容水槽液位控制系统(自平衡特性)如图3-6所示。
在初始状态(稳态),进料量等于出料量,控制器输出为u0。当负荷增大时,实际控制器输出为u(t)=KPe(t)+u0,增加的控制输出使进料量的增加量等于出料量的增加,重新建立新的平衡关系。因此,调节阀开度必须有相应的改变,从比例调节器来看,这就要求液位必须有余差。
(3)比例值对系统调节过程的影响
比例调节的余差随着比例值的增加而减小。从这方面考虑,为了减小余差,应尽可能地增加比例值。然而,增加比例值等于加大系统的开环增益,可能导致系统振荡加剧,甚至不稳定。图3-7为不同比例值下系统的单位阶跃响应曲线。随着比例值的增大,控制系统的余差减小,但振荡加剧,振荡周期缩短。
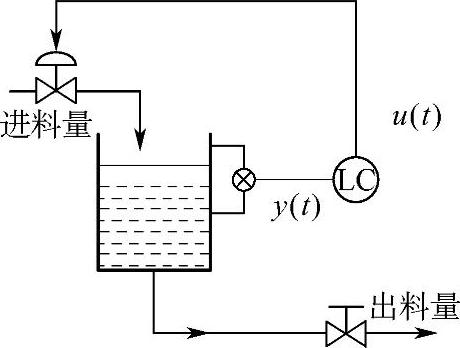
图3-6 单容水槽液位控制系统
假设被控系统为G0(s)=e-50s/(36s+1),只采用比例控制策略,即在TI→∞与TD→0时,研究在不同的KP值下,闭环系统阶跃响应的曲线,如图3-7所示。
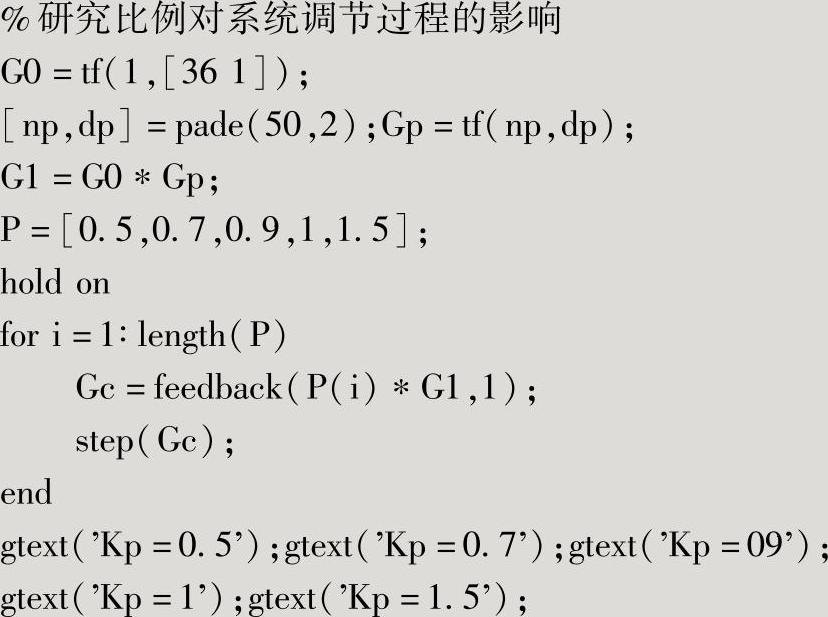
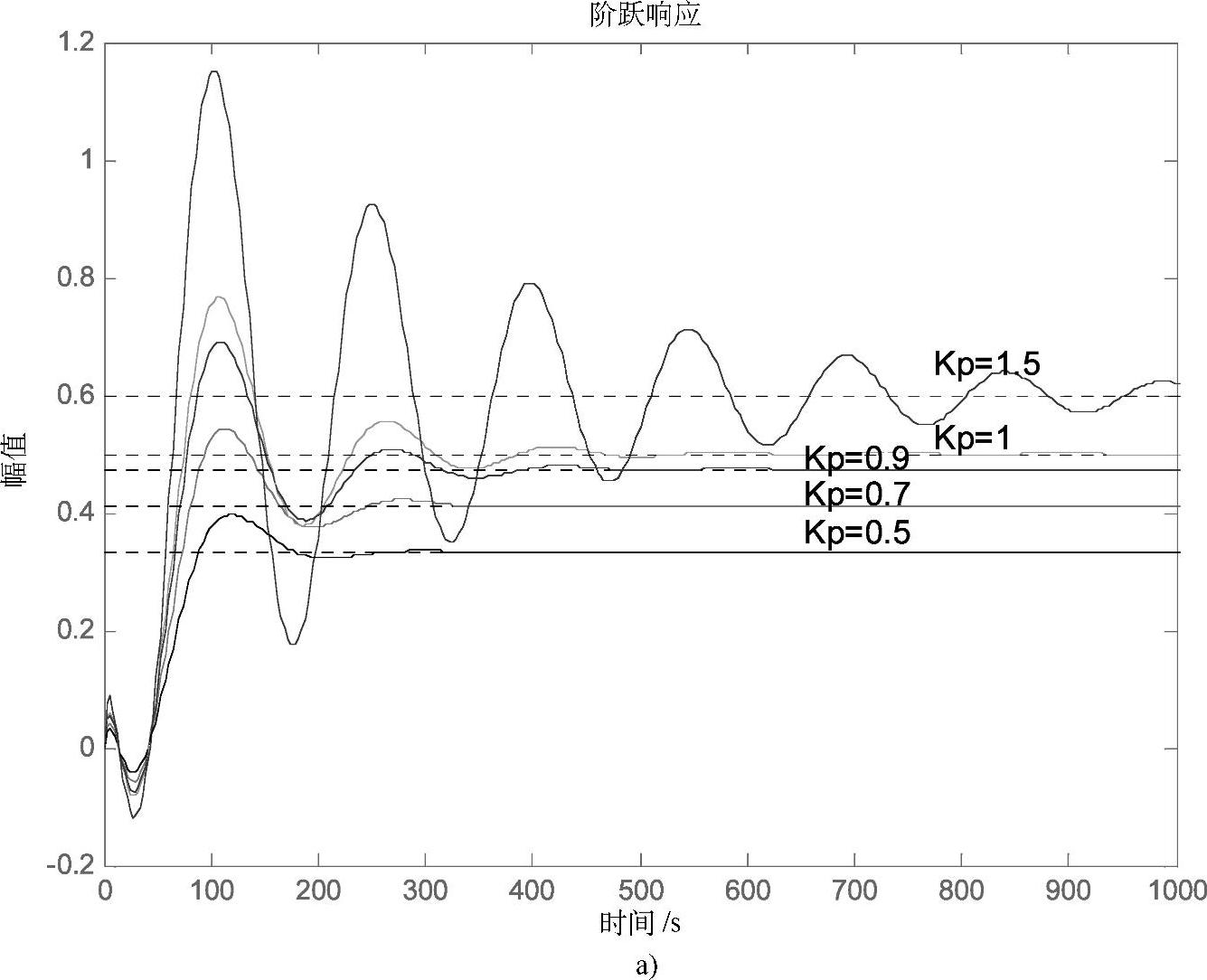
图3-7 比例增益对控制系统的响应曲线
a)τ/T>1
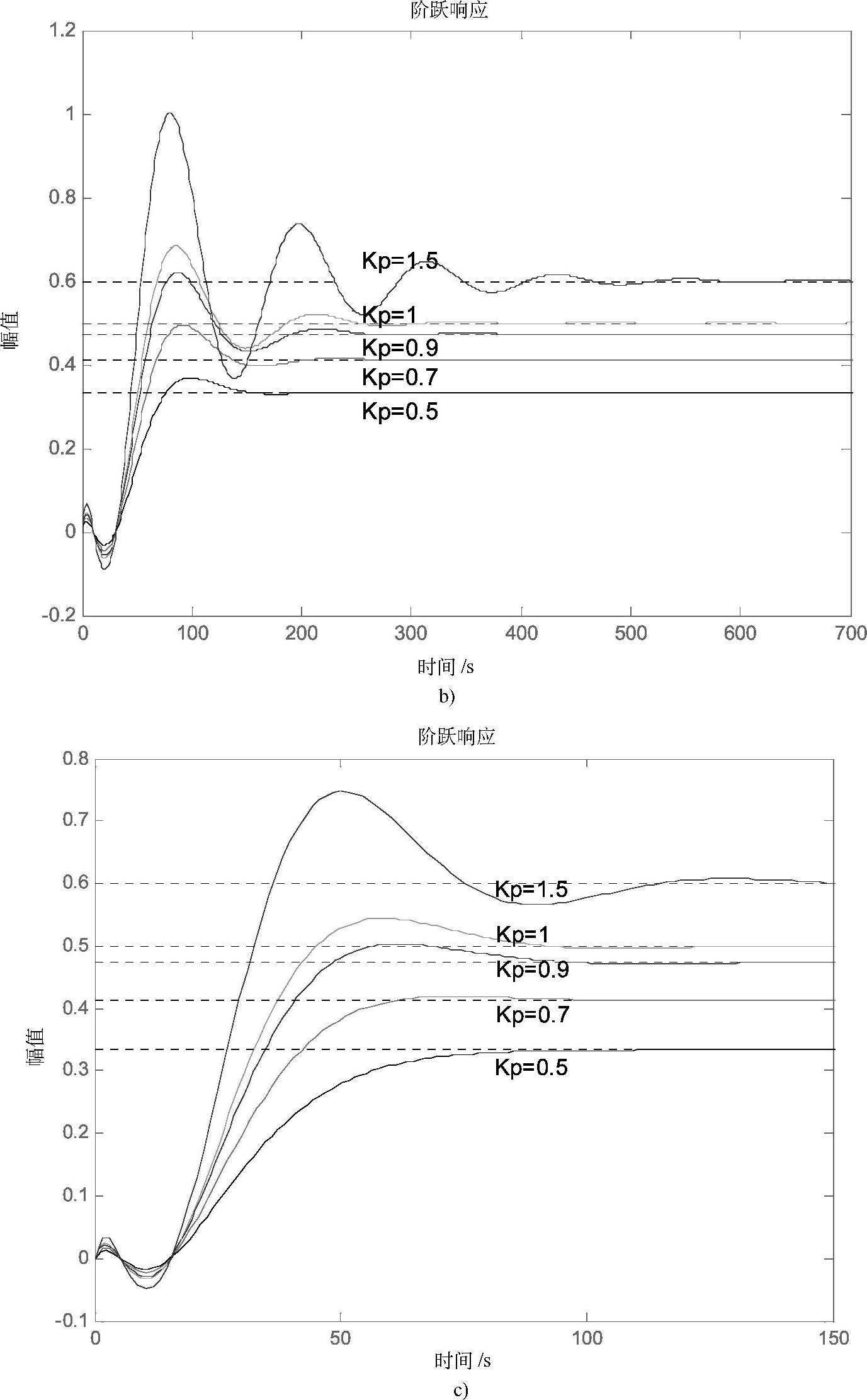
图3-7 比例增益对控制系统的响应曲线(续)
b)τ/T=1 c)τ/T<1
(4)比例值对控制系统稳定性的影响
从图3-7可以看到,随着比例增益的增大,即比例带的减小,系统的稳定性变差,甚至不稳定。从物理涵义来看,比例带很大程度上意味着调节阀的动作幅度很小,被控量的变化比较平稳,但系统余差较大,调节时间也较长;减小比例带,则加大了调节阀的动作幅度,引起被控量来回波动,系统余差相应减小;比例控制存在一个临界的比例带,此时系统为等幅振荡。
对于比例控制中比例度的设置,首先保证系统在稳定的前提下,并且使系统具有一定的稳定裕度,如增大比例值,系统的余差仍无法满足要求,应考虑采用其他调节方法。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。