



例1:建立连续系统的仿真模型。
方法一:
输入信号源使用阶跃信号,系统使用开环传递函数2/(s2+0.9s),接收模块使用示波器来构成模型。
1)在“Sources”模块库选择“Step”模块,在“Continuous”模块库选择“Transfer Fcn”模块,在“Math Operations”模块库选择“Sum”模块,在“Sinks”模块库选择“Scope”模块。
2)连接各模块,从信号线引出分支点,构成闭环系统。
3)设置模块参数,打开“Sum”模块参数设置对话框,如图2-19所示。将“Icon shape”设置为“rectangular”,将“List of signs”设置为“+-”,其中“”表示上面的入口为空。
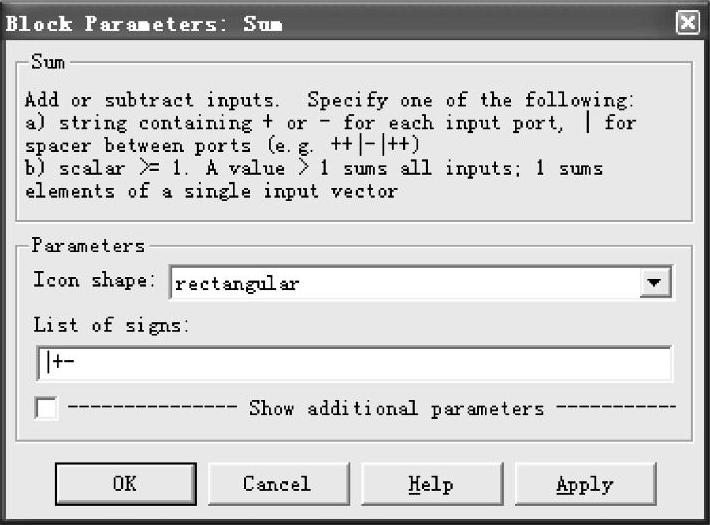
图2-19 “Sum”模块参数设置
4)“Transfer Fcn”模块的参数设置对话框中,将传递函数的numerator设置为“[2]”,将分母多项式“Denominator”设置为“[10.90]”。
5)“Step”模块的参数设置对话框中,将“Step time”修改为0,得到的模型如图2-20所示。
6)仿真并分析。单击工具栏的“Start simulation”按钮,开始仿真,在示波器上就显示出阶跃响应。
在Simulink模型窗口,选择菜单“Simulation”→“Simulation parameters…”命令,在“Solver”页将“Stop time”设置为10,然后单击“Start simulation”按钮,示波器显示的就到10s结束。仿真结果如图2-21所示。
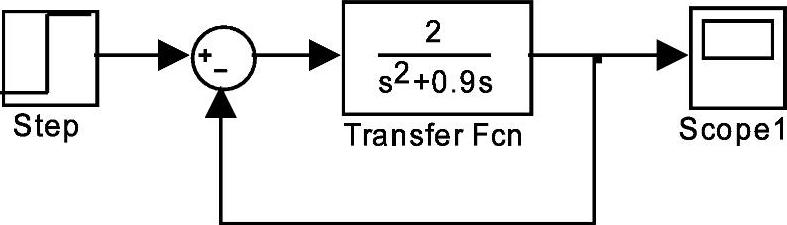
图2-20 二阶系统模型
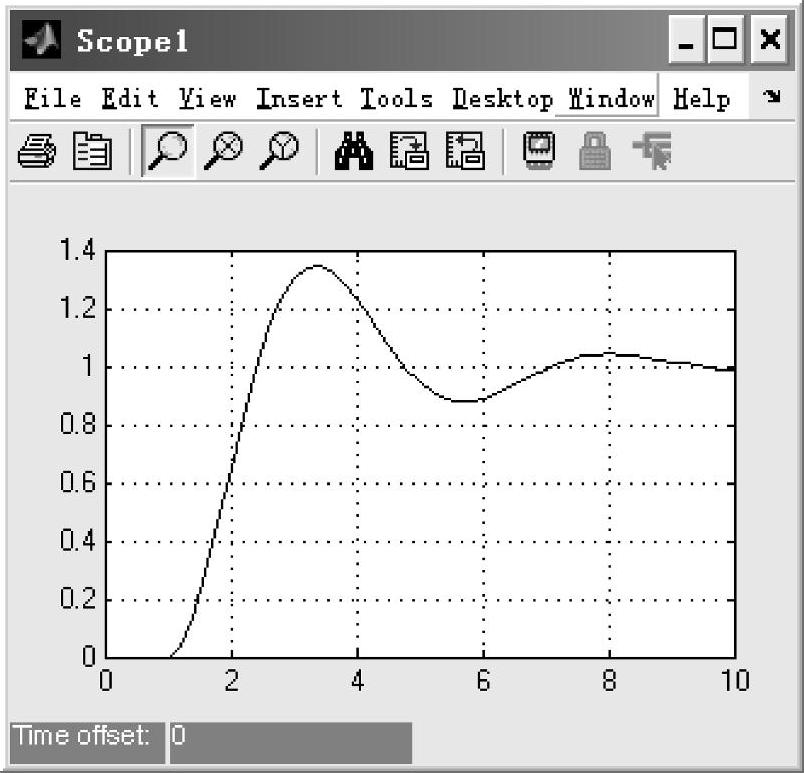
图2-21 示波器显示
方法二:
1)系统使用积分模块(Inte grator)和零极点模块(Zero-Pole)串联,反馈使用“Math Op-erations”模块库中的“Gain”模块构成反馈环的增益为-1。
2)连接模块,由于“Gain”模块在反馈环中,因此需要使用“Flip Block”翻转该模块。
3)设置模块参数,将“Zero-Pole”模块参数对话框中的“Zeros”栏改为“[]”,将“Poles”栏改为[-0.6]。
4)将“Gain”模块的“Gain”参数改为-1,得到的模型如图2-22所示。
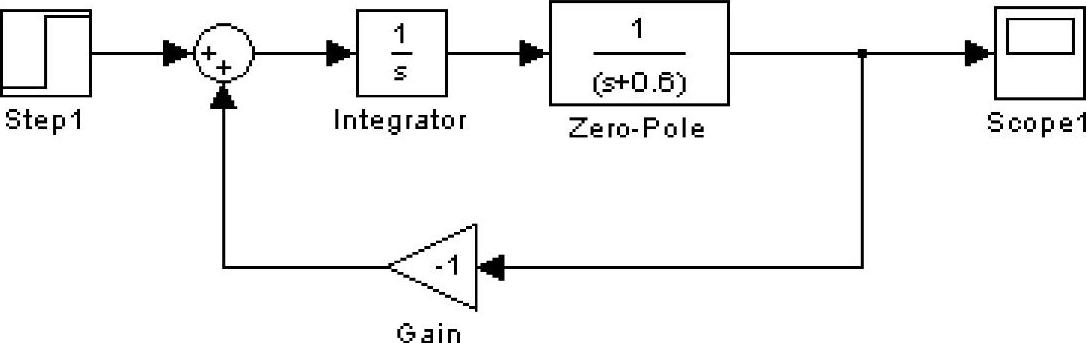
图2-22 二阶系统模型
如果将示波器换成“Sinks”模块库中的“Out”模块 ;然后在仿真参数设置对话框的“Workspace I/O”页(工作空间输入输出),将“Time”和“Out-put”栏勾选,并分别设置保存工作空间的时间量和输出变量为“tout”和“yout”。仿真后在工作空间就可以使用这两个变量用plot函数来绘制曲线,显示在Figer窗口,如图2-23所示。
;然后在仿真参数设置对话框的“Workspace I/O”页(工作空间输入输出),将“Time”和“Out-put”栏勾选,并分别设置保存工作空间的时间量和输出变量为“tout”和“yout”。仿真后在工作空间就可以使用这两个变量用plot函数来绘制曲线,显示在Figer窗口,如图2-23所示。
例2:离散系统的仿真举例。(https://www.xing528.com)
控制部分为离散环节,被控对象为一个二阶连续环节,其中一个有反馈环,反馈环引入了零阶保持器,输入为阶跃信号。
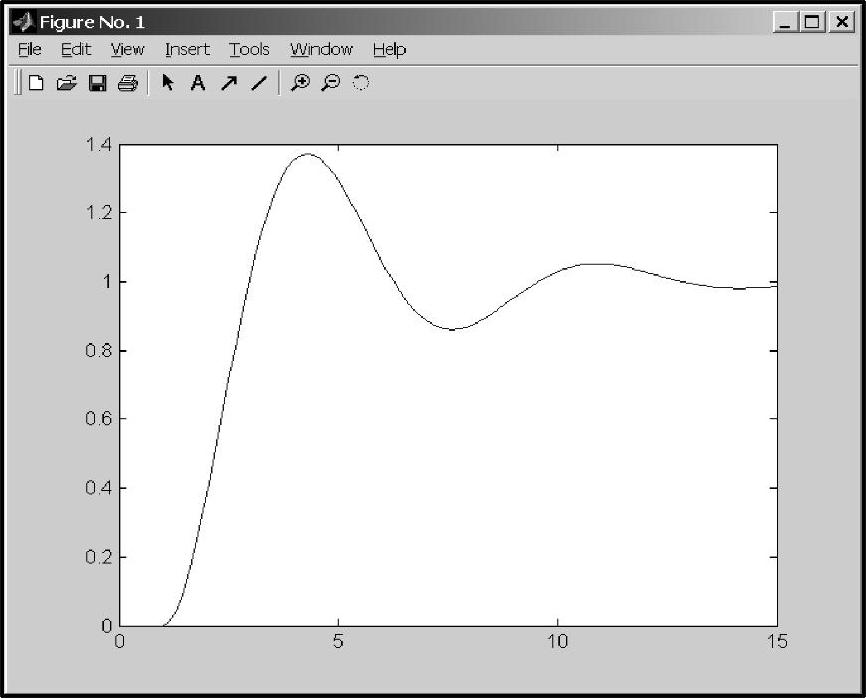
图2-23 plot绘制的时域响应波形
创建模型并仿真:
1)选择一个“Step”模块,选择两个“Transfer Fcn”模块,选择两个“Sum”模块,选择两个“Scope”模块,选择一个“Gain”模块,在“Discrete”模块库选择一个“Dis-crete Filter”模块和一个“Zero-Order Ho ld”模块。
2)连接模块,将反馈环的“Gain”模块和“Zero-Order Ho ld”模块翻转。
3)设置参数,“Discrete Filter”和“Zero-Order Ho ld”模块的“Sample time”都设置为0.1s。
4)添加文本注释,系统框图如图2-24所示。
5)开始仿真,在Simulink模型窗口,选择菜单“Simulation”→“Simulation parameters”,将“Max step size”设置为0.05s,两个示波器“Scope2”和“Scope1”的显示结果如图2-25所示。
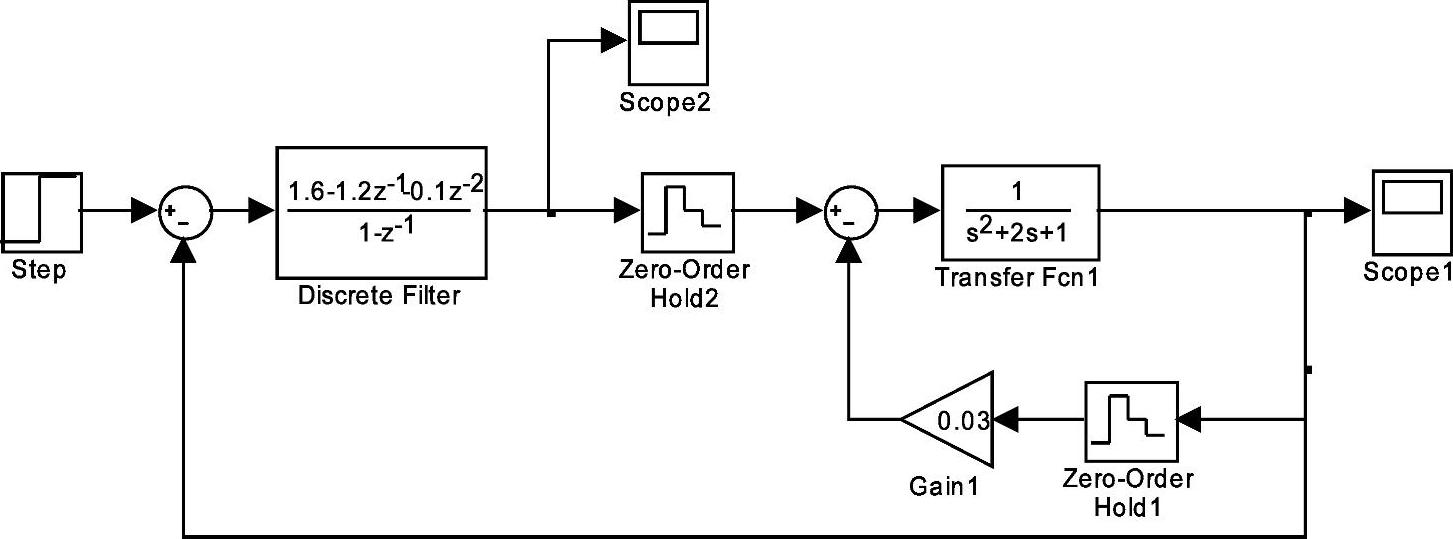
图2-24 离散系统模型
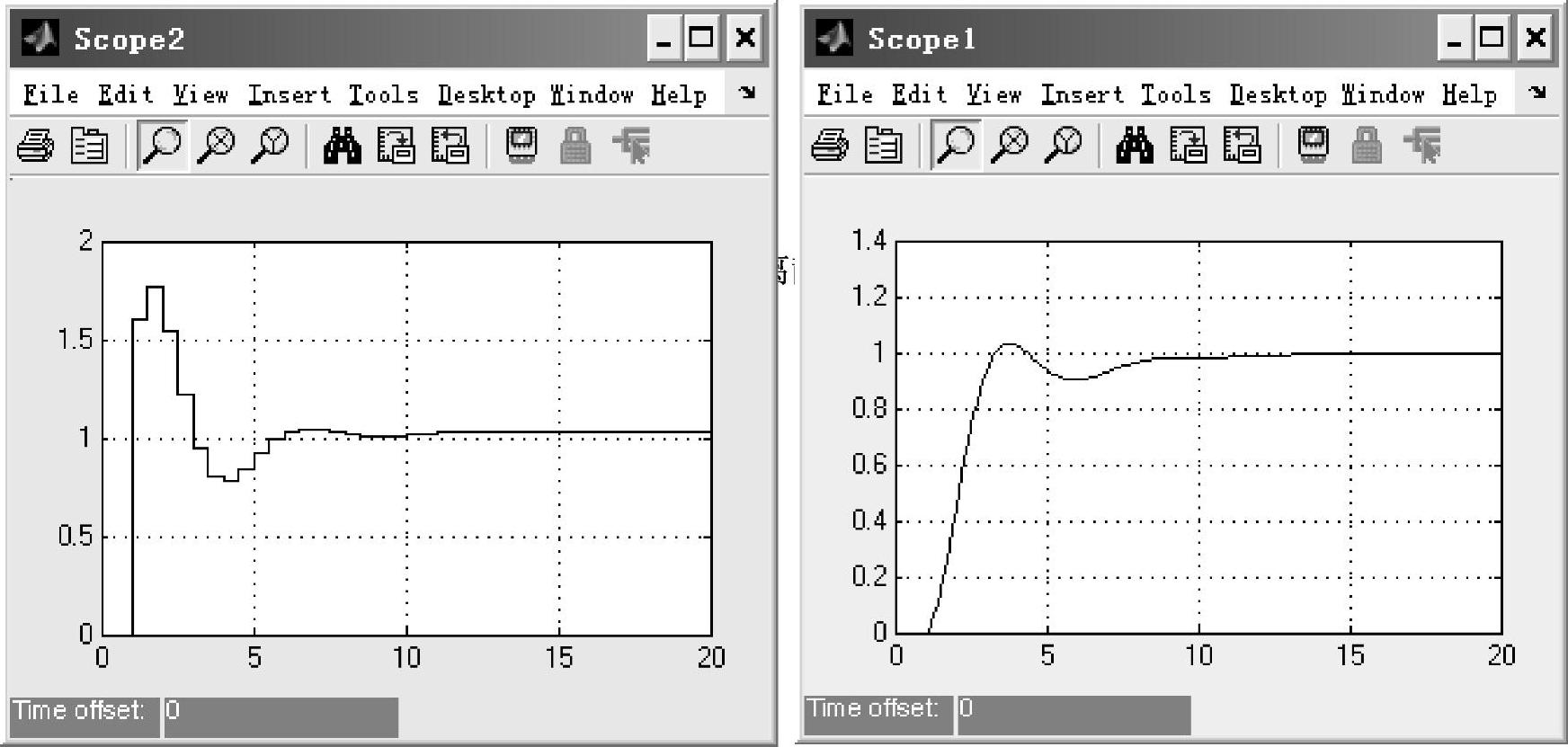
图2-25 离散系统仿真结果图
例3:连续系统PID控制系统Simulink仿真。
连续系统的PID控制模型如图2-26所示,系统对连续系统进行PID调节并加扰动信号,示波器Scope分别显示调节结果和阶跃信号及扰动信号,而示波器Scope1将3个信号在同一个窗口叠加显示出来。
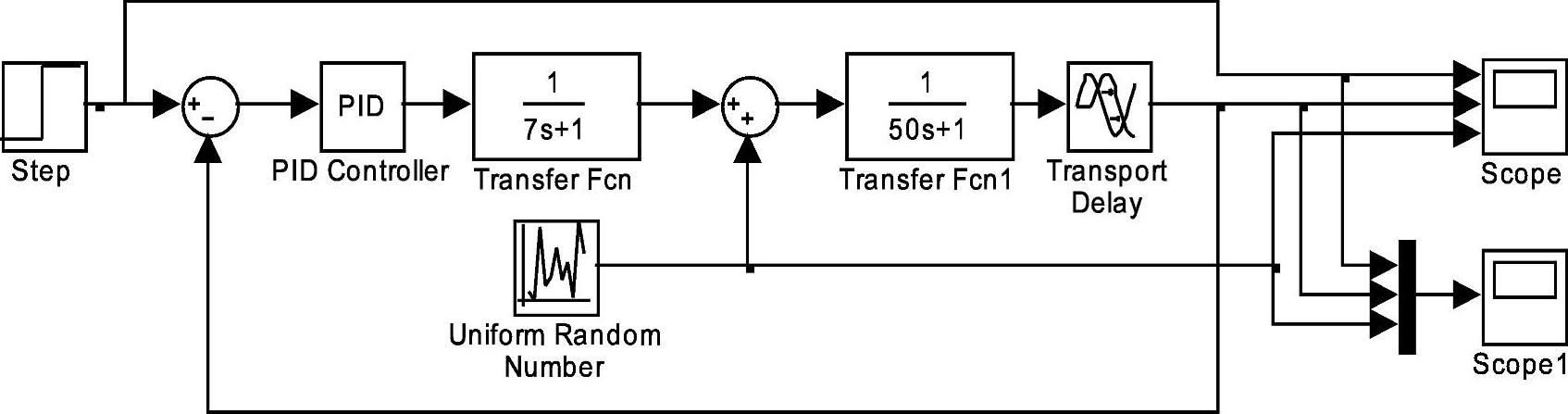
图2-26 PID控制系统模型
在“Sources”模块库选择“Step”模块和“Uniform Random Number”模块,在“Con-tinuous”模块库选择“Transfer Fcn”模块和“Transport Delay”模块,在“Math Operations”模块库选择“Sum”模块,在“Sinks”模块库选择“Scope”模块。展开“Simulink Exfras”模块库,在“Additional Linear”库里面可以选择“PID”模块,连接各模块,构成PID控制系统。
单击工具栏的“Start simulation”按钮,开始仿真,在示波器上就显示出调节结果。示波器Scope显示结果如图2-27所示。
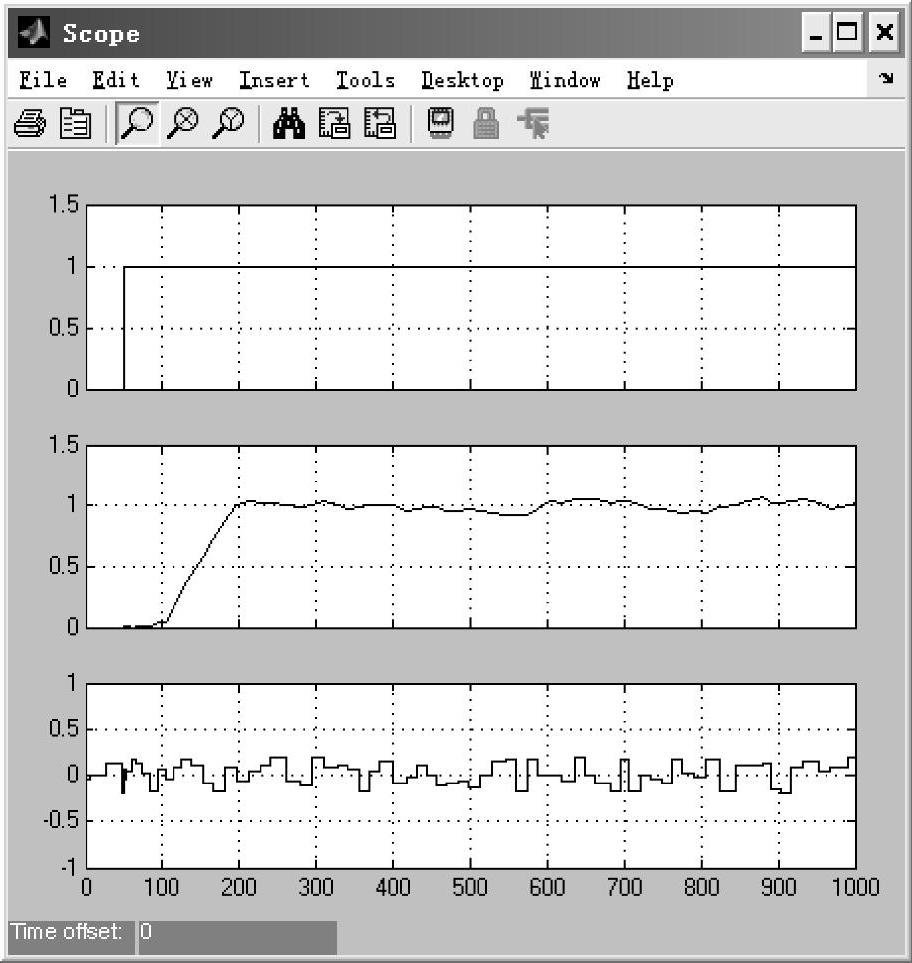
图2-27 示波器Scope显示结果
经叠加后的显示结果如图2-28所示。
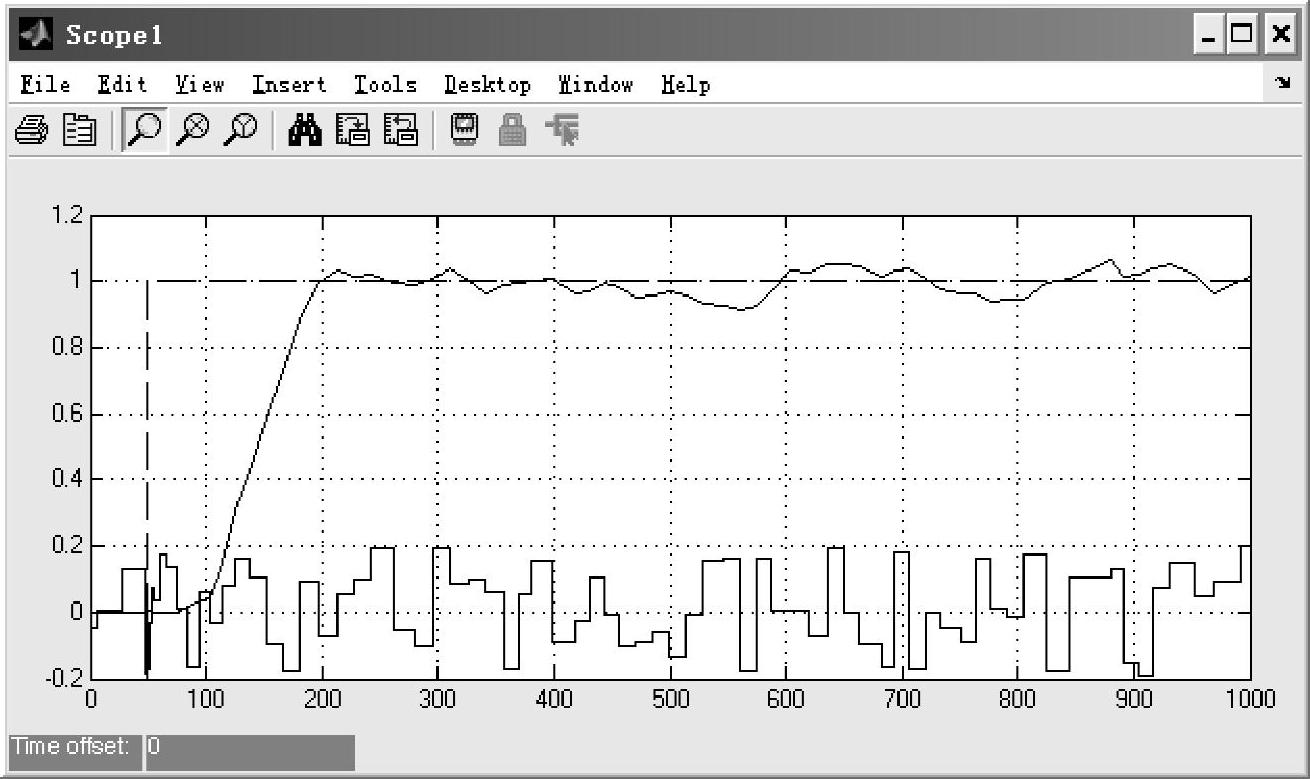
图2-28 示波器Scope1显示结果
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。