



对SINAMICS V60驱动器的优化也就是对图6-8中各环节参数进行整定,使其动态性能和静态性能达到最优的过程。
SINAMICS V60驱动器和电动机是相互之间匹配使用的,所以电动机模型参数及编码器的线数和倍频关系均已固定,不需要再对电流环调节器、位置计算和速度计算单元进行优化。因此,对SINAMICS V60驱动器的优化实质上是对位置环调节器、速度环调节器及位置前馈的优化。
(1)位置环调节器
位置环调节器为比例调节器,在SINAMICS V60驱动器中只能修改位置环调节器的比例增益。
(2)速度环调节器
速度环调节器为比例积分调节器,在SINAMICS V60驱动器中可以修改速度环调节器的比例增益和积分时间。
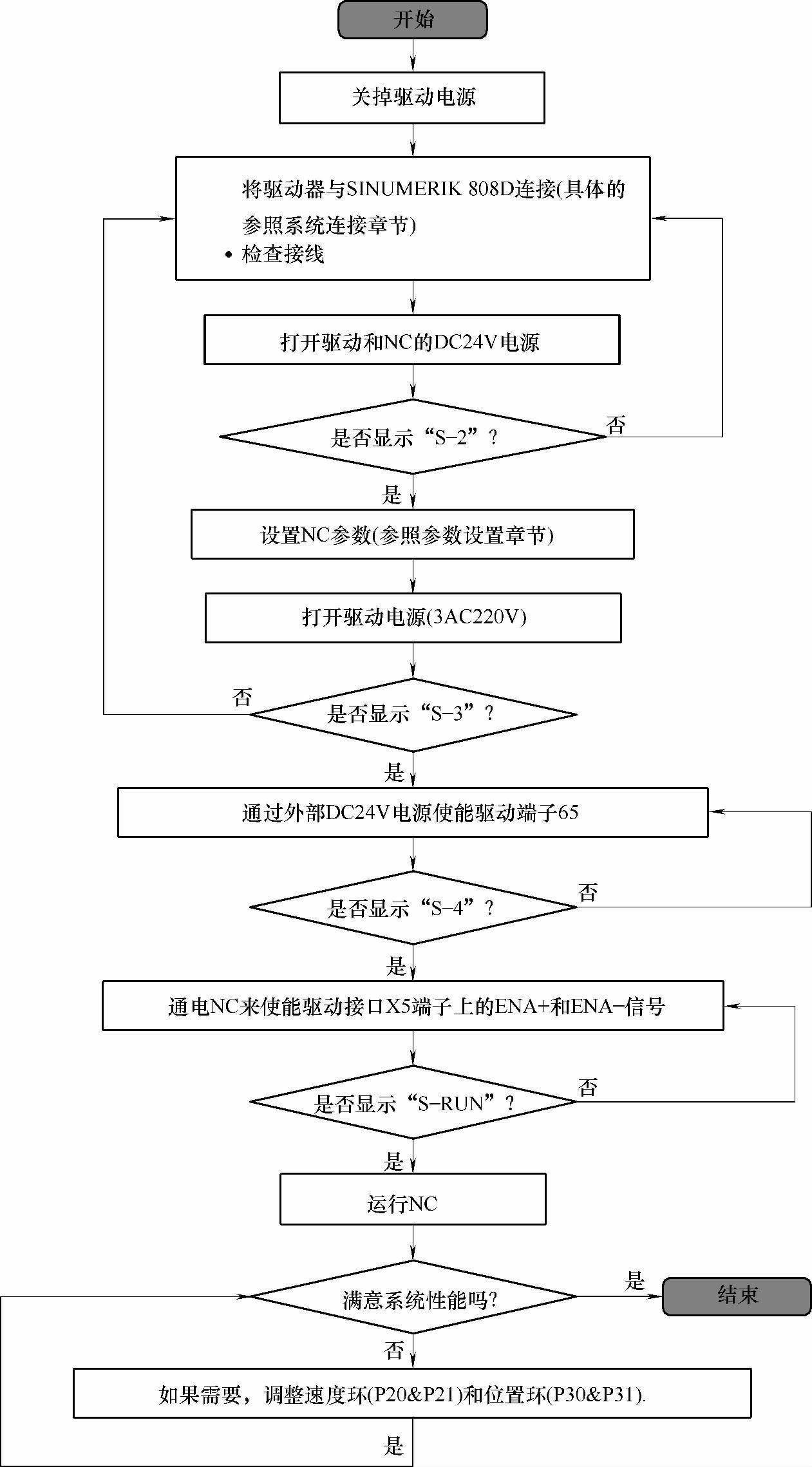
图6-7 SINUMERIK 808D数控系统与SINAMICS V60驱动器整体调试流程示例图
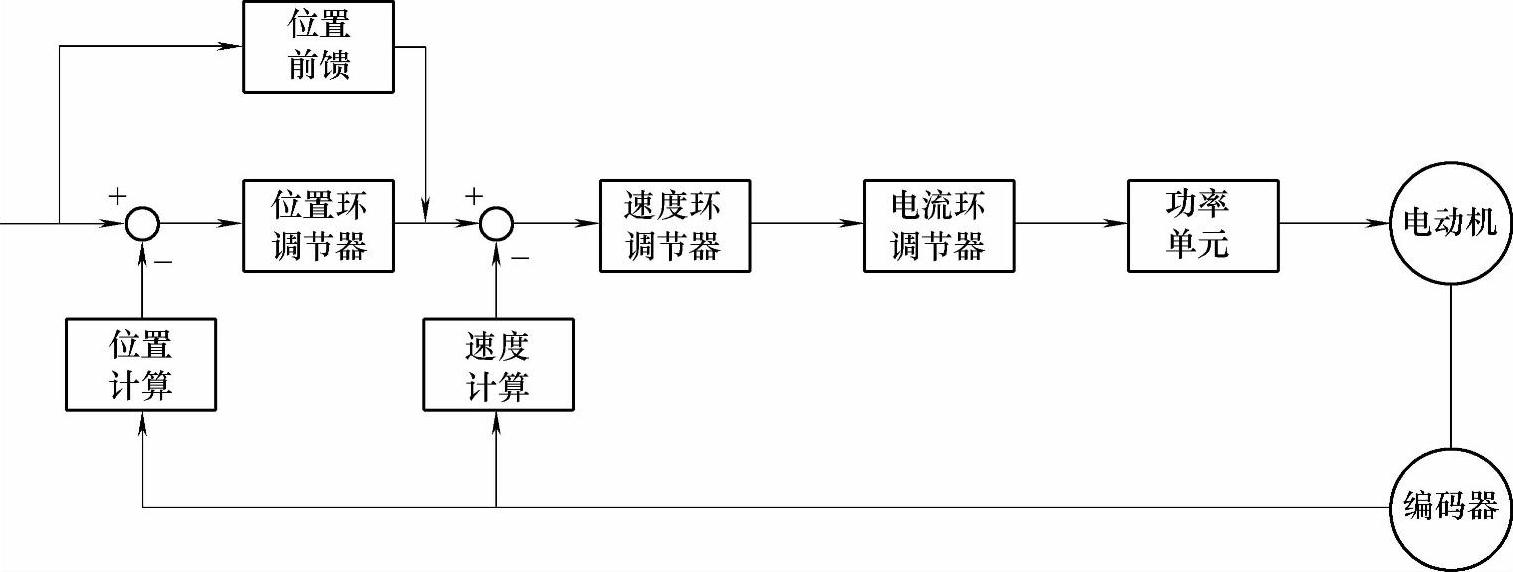
图6-8 SINAMICS V60驱动器控制原理示例图
(3)位置前馈(https://www.xing528.com)
位置前馈环节是将位置给定直接通过一个前馈系数传递到速度调节器。
需要说明:从比例积分调节器的原理可以知道,比例调节的作用是加快响应速度,积分调节的作用是消除静态误差:当比例增益增大时,其响应速度加快,静态误差变小,但当比例增益过大时,则会引起系统超调和振荡;当积分时间减小时,其响应速度加快,但当积分时间过小时,也会引起系统超调和振荡。
此外,在需要进行驱动器的优化时,需要遵循由里至外的原则,即首先电流环,然后速度环,最后位置环。速度环的比例增益和积分时间与负载有直接的关系,当负载的惯量较大时,速度环的比例增益也设置的相对较大,而速度环的积分时间设置的相对较小,以提高驱动系统的刚性。
一般情况下,在电动机未发生振荡时,应将速度环的比例增益设置的尽可能大,积分时间设置的尽可能小。对位置环的增益和前馈系数,在位置环未振荡的前提下不做调节;若位置环有振荡,可降低位置环的增益和前馈系统。
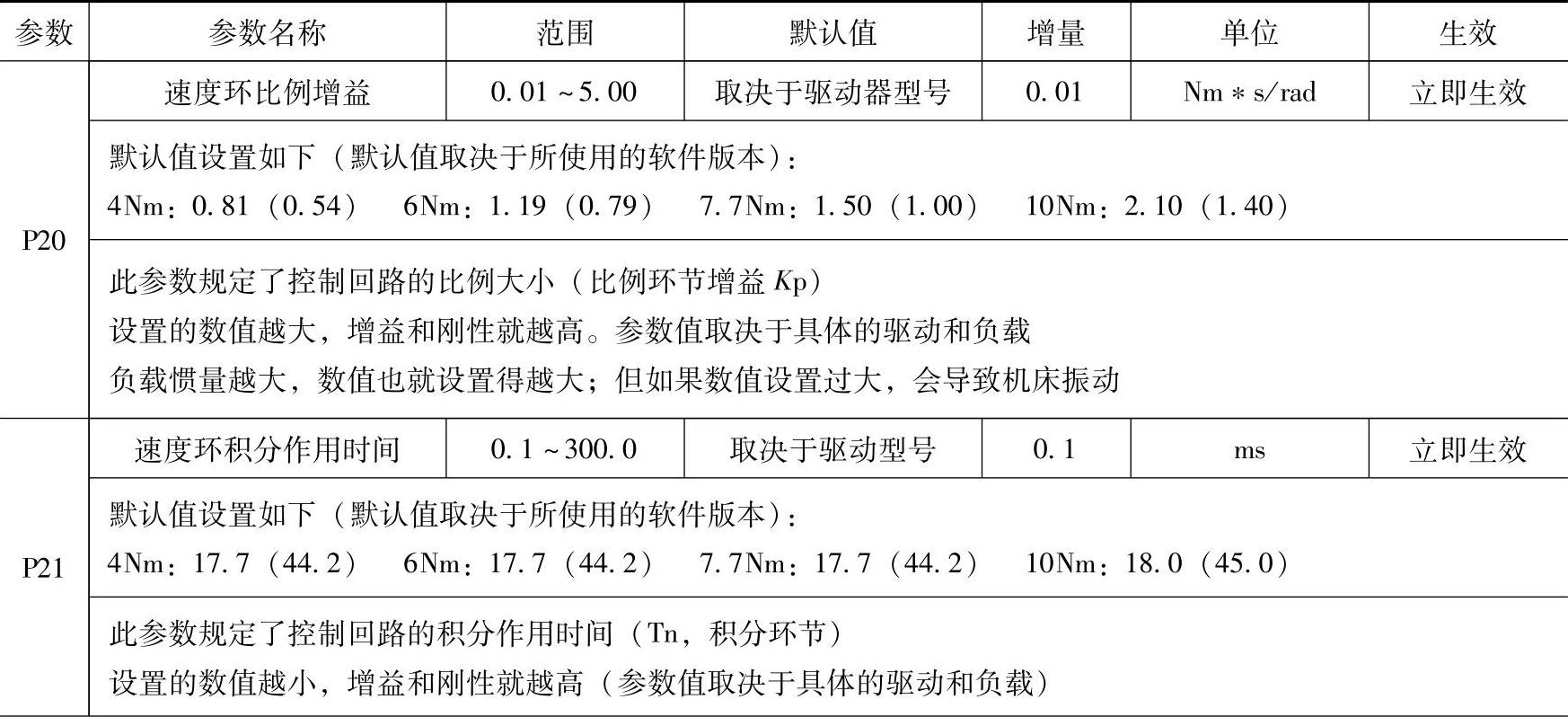
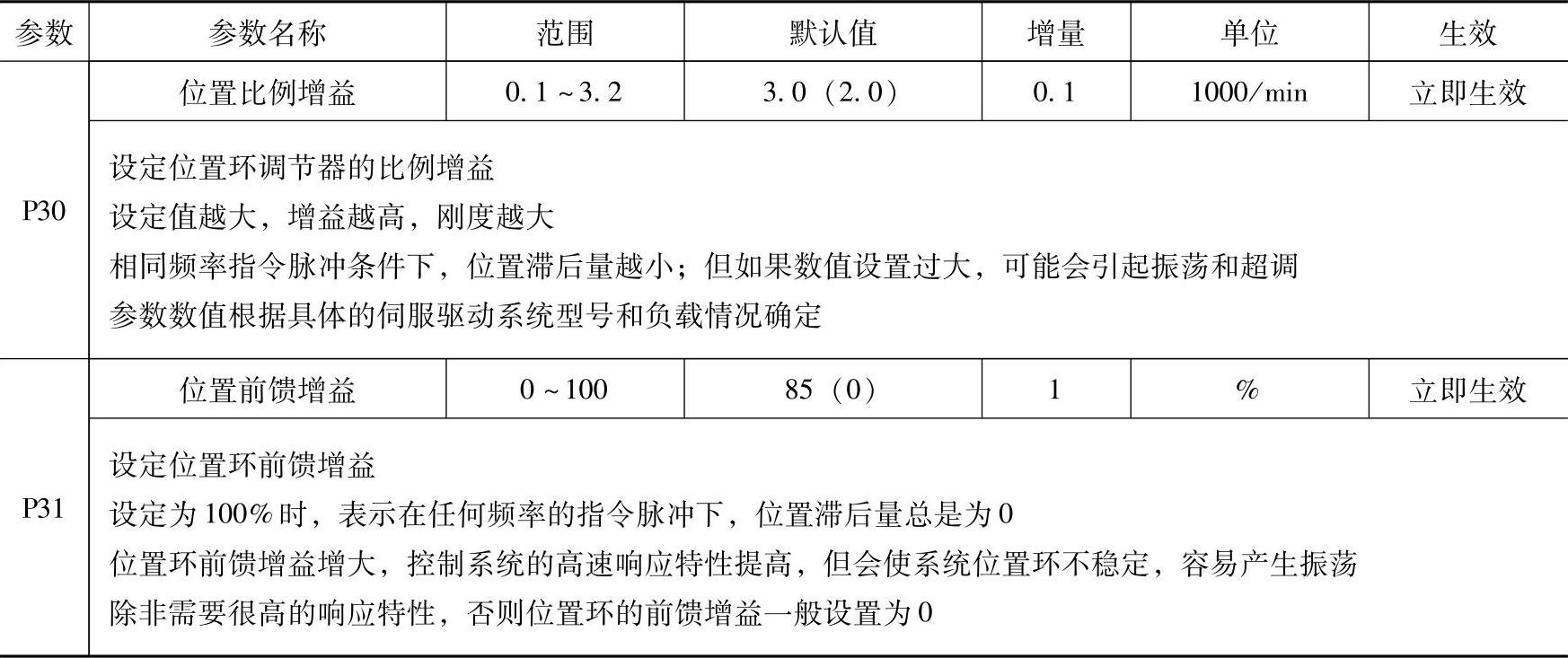
基于以上的说明,表6-3给出了在SINAMICS V60驱动器调试中,需要用到的4个重要参数。应结合实际应用的需要,对这4个数据进行合理的调整。
表6-3 SINAMICS V60驱动器重要参数说明表
(续)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。