



回至2004年,麻省理工学院的媒体实验室[544-546]也许是最早运用硬件试验台来实现协同感知系统的机构之一。搭建这个演示平台的初衷是为了尽可能地达到Nick Laneman在文献[102]中对分布式时空编码的DMT理论性能。但最终证实使用简单、低成本、植入商用硬件产品的嵌入式无线电就可以达到上述目的,并且不需要使用分布式时空编码或波束赋型协议,只需增加一个智能中继选择程序[546]。只有一个节点进行传送的简单算法是相当重要的,这可使得硬件的要求变得简单。随后的分析[547]可以证明,在总功率约束条件下,中继选择和信号再生会优于空时编码算法,这也体现了在某些情况下智能传感是优于空时编码的。
因此,该演示平台说明,即便使用较低成本的硬件产品,在无线环境中智能传感也可以具备良好的性能。为了实现这种性能,分布式自适应路由算法放在靠近物理层来实现,在存在个别哑终端的情况下,网络层的算法也可以提供增益。演示平台更具体的目的可分为以下三点:
●可靠性的提高。在第1章的概述中,中继带来功率增益,并且在可用中继中选择最优中继可以提供额外的分集增益。可靠性的提高是指提高了通信链路的可靠性,降低了错误的发生和链路的中断。演示平台的首要目标就是用来说明这些增益在一个非各态历经传播环境中是可以实现的。
●链路自适应性。系统在一系列可用中继中选择最优中继,是为了使系统能够适应信道的动态变化。例如在个别链路暂时消失时,可以选择使用其他可用的链路。演示平台的第二个目的是表明系统可以适应链路的变化。
●实施的可行性。演示平台的第三个目标是说明对已有的商用硬件在简单的改制之后,就能够实现一个这样的协同系统。
一个完整的无线解决方案,如基于IEEE 802.15.4的协议,其包含了给定的物理层(PHY)和多媒体接入层(MAC)协议,因此演示平台就需要一个微处理单元(MCU)并连接到一个射频(RF)模块上。如图5.11所示,MCU和RF模块具有以下性能:
●MCU模块。图中所示是时钟频率为22.1184 MHz的8 bit 8051MCU。模数转换器(ADC)使用12 bit来表示数值,数模转换器(DAC)使用10 bit表示数值。这样配置的原因是,由于无线信道的变化,模拟输入的变动性较数字输出的大,所以需要更多的比特位来捕获模拟输入。MCU使用了2A/3V的电源进行供电。MCU可以支持所有通信功能的实现,如帧传送、帧同步、帧接收、数据检测、循环冗余检验(CRC)和其他上层链路接入及路由协议。
●RF模块。此模块由发射机、接收机和接收信号强度指示器(RSSI)组成。RSSI的作

图5.11协同结点的硬件实现(左)以及使用的硬件组成架构(右)
用是估计发射机和接收机之间的信道质量。模块是单片RF电路,运行的频率为961.5MHz,并且通过使用简单的开关键控实现了115kBd的有效波特率。
在2006年,生产上述硬件的每个节点成本约为20欧元。可见此成本相对较低,同时也说明了用低成本实施协同系统的可行性。
协同协议的实现采用了一些已有的概念与方法,例如前导抽样、天线选择、基于度量的响应延迟等。完整的分布式协同中继协议包括以下几个阶段:
●信道功率估计。无线链路使用类似于前导样值[548]的方法对信道功率进行判断。在信息传送之前,源节点广播一个前导,表示准备发送(RTS),目的节点用一个清除发送(CTS)消息来对此进行应答。RTS和CTS都会被中继节点检测到,中继节点通过使用RSSI模块来估计在源节点与中继j之间的信道功率γs,j,以及中继j和目的节点的信道功率γj,d(基于信道相干性)。
●信道质量度量。如果知道整个网络的无线信道状况,就可以实现最优中继的主动选择。中继的最优选择标准并非是唯一的。举例来说,对于透明结构,一个好的选择策略就是选择使γj=γs,jγj,d/(γs,j+γj,d)最大化的中继;对于再生中继,选择最优中继的度量标准是γj=min(γs,j,γj,d)[437]。由于演示平台使用的是再生方法,所以采用了第二种度量标准。
●主动中继选择。信道质量的相关测量信息需要智能地分发到网络中,这样最优中继才能进行协同,而其他中继继续休眠。这可以用一个完全分布式的方式来实现:在CTS发送完之后,最优中继发送一个准备好中继(RTR)的消息来标记它是可用的,这个消息需要延迟一段时间,这个时间与本地信道质量度量γj成反比。因此,一个状态好的节点要先于一个状态差的节点进行响应,使得状态好的节点会被选为中继节点。为了解决RTR消息相冲突的情况,还需要提供一种冲突解决机制,目前这种机制还没有在这个演示平台中实现。(https://www.xing528.com)
需要注意的是,在一系列最优中继选择等同于最好的天线的选择,可以获得相同的分集增益。
此外,第1章中将主动中继选择与被动选择方式进行了对比。在前一种情况下,参与的中继必须具有最好的信道条件,才能更有利于协同网络。在后一种情况下,所有的中继接收源节点广播的数据并进行译码,但只有被选为协同的中继才能对信息进行正确解码。主动中继选择因为需要发送前导而需要更多的发送能量,但因为系统只使用了单个中继或部分中继,所以其接收能量的消耗较少。最佳的解决方案应该将可使用中继的数目和发送、接收之间的能量分配考虑在内。
●数据通信。当中继确定下来后,源节点就开始发送数据,中继和目的节点对数据进行接收。发送的每一帧都包含一个头(含有源ID、目的ID和CRC等)和实际的数据内容。目的节点对信息进行解码并暂存,确保CRC标识没有解码错误。同样,中继也对数据进行解码,确保CRC指示没有错误,并且对数据进行重新编码发送到目的节点,目的节点再对中继发来的数据进行解码。在这个特定的演示平台中,目的节点在解码前没有进行最大比合并,而是只保留无差错解码中的一路数据。
以上实现了一种完全分布式的协同中继过程,这种实现具有低复杂度,但是在中继选择上需要一些开销。协议有效地保证了在动态变化的无线环境中仍能进行可靠的通信。如图5.12和图5.13中所示,当其他中继途径阻塞时,又重新选择最优的中继。当被选中的中继路径也阻塞后,协议会自动地选择其他更好的中继路径。支持中继协议操作的实现,大大降低了终端到终端的链路中断概率。

图5.12 MIT的硬件演示平台场景
前视图:发送所用的PDA和三个中继(左)。后视图:接收显示和相同的三个中继(右)[544,545]
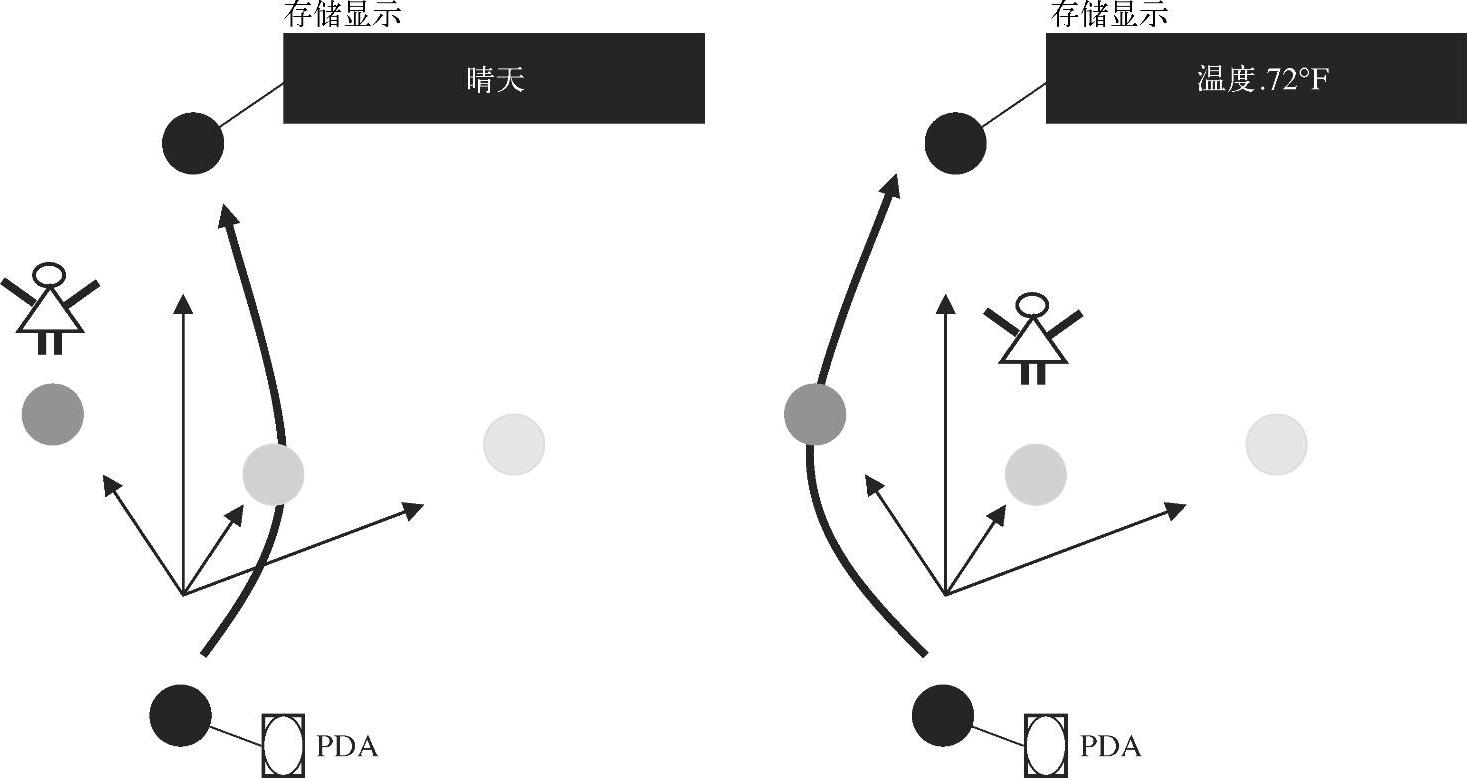
图5.13 具有直接链路和中继选择的协同通信场景。屏蔽一个中继节点后,就会转接到另一个中继上(左)反之亦然(右)。并且可以看出,不同的节点被选为中继,所显示的内容也会不同
这个简单的中继协议在实施的同时也暴露了一些问题和设计上的制约。在构建协同中继系统时,必须把这些问题和制约因素考虑在内:
●更新速率。对于最优中继的选择,要根据需求来不断地进行验证和更新。但是中继选择的更新间隔不能低于信道的相干时间。在图5.12中所示的室内环境下,信道的变化是非常缓慢的,因此信道具有较长的相干时间。以1 m/s的步行速度来算,信道相干时间大约为300 ms,这意味着需要每秒运行三次中继选择算法。具有较大移动性的环境如果采用较高更新速率,就会降低系统的效率。由于相干接收需要信道估计,不相干接收需要信道保持不变,所以这项开销是在任何通信方案中都无法避免的。这也表明必须要定期地感知信道来验证选择的正确性。
●有限的ADC分辨率。由于输出信号的低动态变化性,10 bit的DAC分辨率远高于需求。但12 bit的ADC分辨率却刚刚满足对无线信道动态变化的捕捉。由于室外的无限信道波动性较大,所以在室外的装置需要更高的ADC分辨率。
●8位结构。由于只采用8 bit数据执行计算和信道估计,这应该是系统性能的一个制约因素:一方面不能支持浮点数操作,另外又带来较大的量化噪声。这部分内容在5.3.2节已经提到过。
尽管存在以上问题,MIT支持译码转发的商用硬件中继装置是最先在实际环境中演示和量化中继性能增益的演示平台之一。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。