



参考文献(Howard et al.,2002b)针对具有“观察”周围环境能力的均匀移动传感器,提出了一种增量部署方法。目标是在保持传感器视线的前提下,生成一种具有最大可见总面积的连通网络。在起始阶段,将所有节点(除了一个节点)看做是未部署的,并将唯一的已部署节点作为起点。算法以迭代方式运行于中央控制器。在每次迭代过程中,中央控制器仅部署一个传感器来将网络的边界线向未知区域推进。下面,我们研究算法的迭代过程。
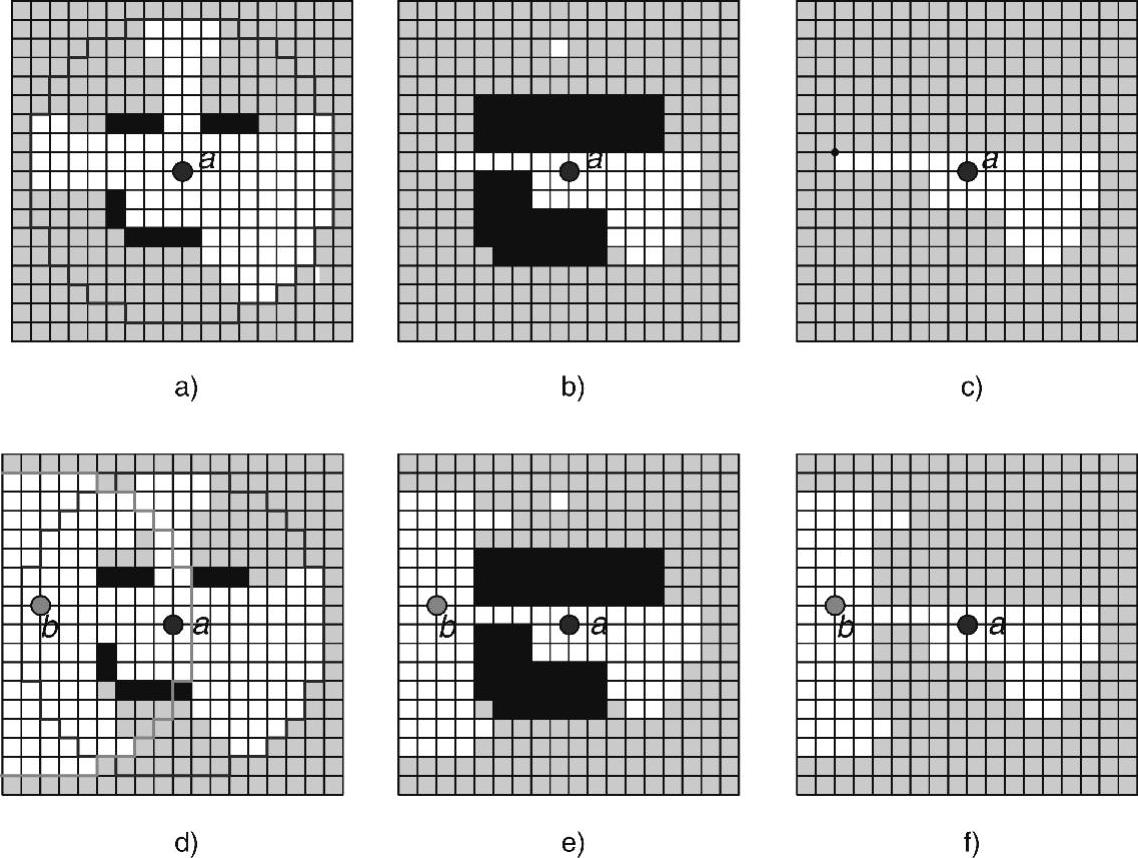
在算法迭代过程中,中央控制器采集先前部署传感器的信息,并在目标区域构建一个占用网格。在占用网格中,如果它不包含障碍物,则称该单元是空闲的,或者当它包含障碍物时,称它为占用的,否则称它为未知的(即不存在如果该单元是否可用的知识,或者存在该单元占用状态的矛盾证据)。图10-11给出了根据部署于环境中的第一个节点a的信息,构建的占用网格。在图中,唯一节点的视觉能力使用代表圆的闭合线进行标记,黑单元表示已占用,白单元表示处于空闲状态,其他则表示未知。
中央控制器将占用网格转化为配置网格。在这种网格中,当且仅当所有附近(在某一预定义距离中,如单元尺寸)单元处于空闲状态时,该单元是空闲的;或者至少有一个附近单元处于占用状态时,该单元是占用的,否则该单元是未知的。图10-11b给出了与图10-11a中占用网格对应的配置网格。在该图中,白色单元是空闲单元,黑色单元是占用单元,其他单元是未知单元。
配置网格进一步转化为可达性网格。在此过程中,如果在该单元和特定部署节点的位置之间存在着空闲单元的某些链,则将配置网络中的空闲单元标记为可达的,否则标记为不可达的;将其他单元标记为不可达的。在图10-11c中,可达单元用白色单元来表示,给出了从图10-11b中配置网格得到的可达性网格。需要注意的是,在图10-11c中,将图10-11b中黑色单元上的白色单元标记为不可达的,是因为不存在将该单元与节点链接起来的空闲单元路径。
 (https://www.xing528.com)
(https://www.xing528.com)
图10-11 增量方法
a)占用网格(1个节点) b)配置网格(1个节点) c)可达性网格(1个节点) d)占用网格(2个节点) e)配置网格(2个节点) f)可达性网格(2个节点)
可达性网格构建后,为了使得感知区域重叠最小化,可以将节点保守地配置在空闲与未知空间之间的某个位置,或者乐观地配置在能够最大限度减小未知空间的位置。在此过程中,候选单元可能是唯一的。可以采用不同策略来引导可达单元的选择,最终得到不同的网络拓扑。
一旦目标位置确定,即可找到位于入口点(节点进入环境通过的点)和目标位置之间、通过先前部署节点的最短路径。一种顺序或并发转向运动(第10.3节)过程沿着该路径执行。这种方法解决了传感器在运动过程中的相互阻塞问题,并平衡了能耗问题。观察图10-11c。假定目标位置是有斑点的点。然后,节点将移动到该点,而将新节点b部署在a的位置(入口点)。图10-11d、图10-11e、图10-11f给出了将节点b添加到环境中后形成的占用网格、配置网格和可达性网格。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。