



参考文献(Seah et al.,2006)构建了一种组网无线传感器系统,执行器安装在能够工作于各种地形的移动机器人上。机器人(执行器)移动来填补通信间隙,而另一些节点用作界标节点,协助机器人搜索目标。该算法是针对包含房间的大型室内环境提出的。传感器散布在该区域内,但门和窗防止连通性和充分覆盖。应用局部算法(Wong et al.,2005)后,每个传感器节点保存了到所有n个界标节点跳数距离的n元组。每个传感器周期性广播信标消息,该信息消息包含这个到其邻居和附近执行器跳数距离的n元组。最新部署的传感器将广播一条位置数据包,来更新区域周围传感器的n元组跳数,如果移动执行器从周围传感器接收到大量不同的跳数(指向界标),则它将该区域看做是一个临界区域,并试图通过部署新传感器,找到合适的点来桥接通信间隙。
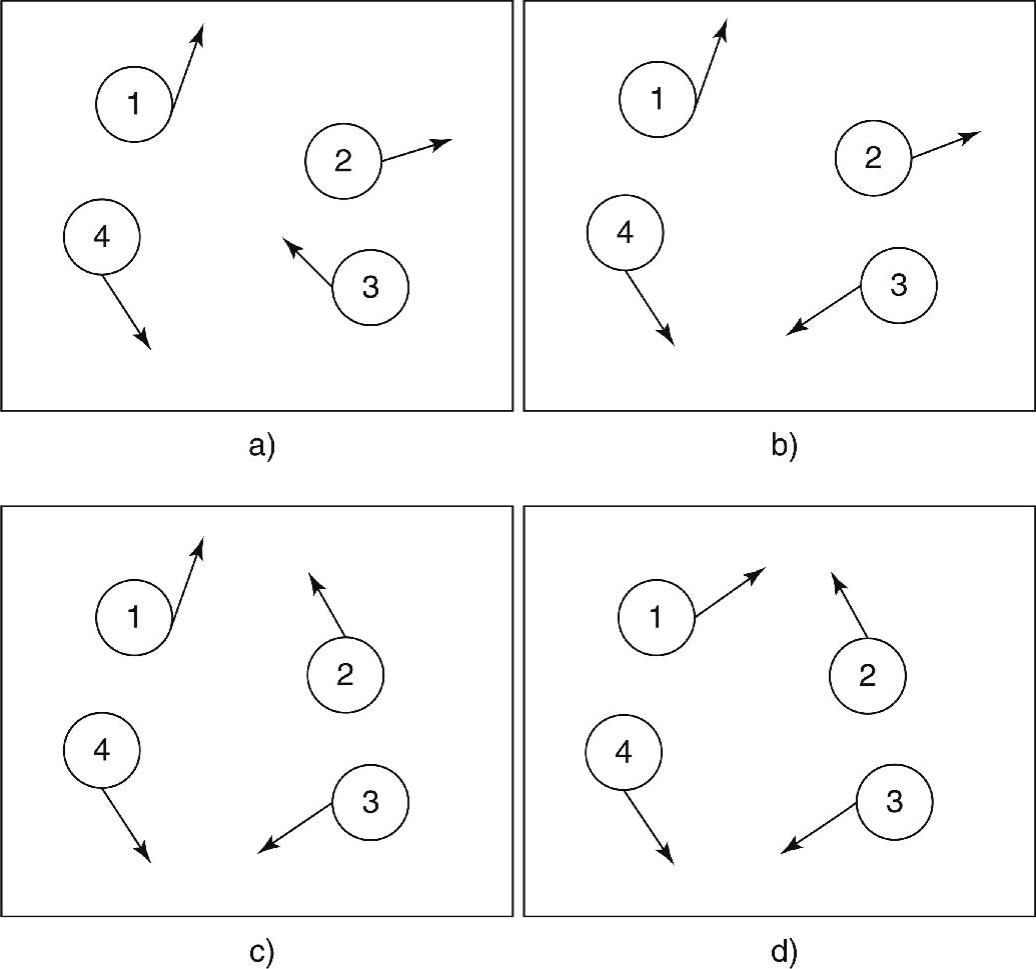
参考文献(SEAH et al.,2006)提出了一种针对机器人移动方向的类似蜂群的模型,来协同搜索环境中的通信间隙和目标。每个机器人(执行器)周期性地广播其ID和指向其邻居的方向。仅当其邻居ID比自身高时,每个机器人将调整其方向。新方向是在顺时针方向上,具有较高ID最近邻居的方向加上90°。该过程如图9-6所示。4个相邻节点的初始运动方向如图9-6a所示。假定节点决策顺序为4、3、2、1。由于在所有邻居中,节点4具有最高ID,因而它不改变方向。节点3的新方向是在顺时针方向上,节点4的方向加上90°(如图9-6b所示)。同样,节点2和节点1分别基于节点3和节点2的方向来调整自己的方向。节点的最终方向如图9-6d所示。
在这个问题陈述中,机器人协同完成区域内的传感器配置。第10章描述了机器人配置传感器的许多其他技术,在配置时,既可以使用机器人协同通信,又可以不使用机器人协同通信。
 (https://www.xing528.com)
(https://www.xing528.com)
图9-6 选择执行器的运动方向
a)初始运动方向 b)节点3改变其方向 c)节点2改变其方向 d)最终的运动方向
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。