



传感器的协同运作支持物理现象的分布式感知。在无线传感器网络(WSN)中,汇聚节点(基站)执行数据采集、处理和协同功能。在无线传感器与执行器网络(WSAN)中,传感器-执行器和执行器-执行器都需要用到协同通信。当传感器检测到环境中发生的事件后,事件数据被处理(如与来自于附近传感器的报告进行融合)和传输到执行器,执行器负责采集、处理,最后重构事件特性。在传感器和执行器之间建立数据路径的过程称为传感器-执行器协同(Melodia et al.,2007)。传感器-执行器协同提供从传感器到执行器的事件特征传输。传感器和执行器协同通信也可以完成其他任务,如传感器配置或改善连通性。
参考文献(Akyildiz and Kasimoglu,2004)首次对传感器-执行器和传感器-传感器之间的协同通信进行了全面分析。传感器-执行器协同通信有几项主要要求(Akyildiz and Kasimoglu,2004)。在WSAN中,传感器与执行器之间的通信要求节能,以延长网络的生存周期。在一些实时应用(如火灾检测)中,通信流量通常是延迟敏感的。因此,传感器-执行器通信应当支持这些应用中的实时流量。传感器-执行器通信还要求保证报告给执行器的事件数据排序。例如,假定存在两个传感器,向公共执行器报告了两个不同的事件。这两个事件可能需要按照事件被检测的次序进行传输,以针对环境可采取正确的相应行动,这样执行器在整个事件区域只完成一次动作。要求传感器对事件进行跟踪,并使用该信息来确定报告感知现象的执行器集。
如果网络中存在多个执行器,则存在于传感器-执行器协同通信中的一个自然问题是,将感知现象向哪一个执行器报告?问题是选择接收传感器数据的执行器。在事件驱动分区中,只有位于事件区域内部的传感器在报告数据。在图9-1中,事件区域是一个圆。传感器根据它们报告数据的执行器进行分区,执行器充当对应数据报告树的根节点。生成数据传送树的目的是使用最小资源消耗,来提供所需的可靠性(Melodia et al.,2007)。这些簇的形成方式可能是实现从传感器到簇头(Cluster Head,CH)事件报告时间最小化,传感器通过最短能量路径,向CH报告数据,或者执行器的作用区覆盖整个事件区域(Akyildiz and Kasimoglu,2004)。
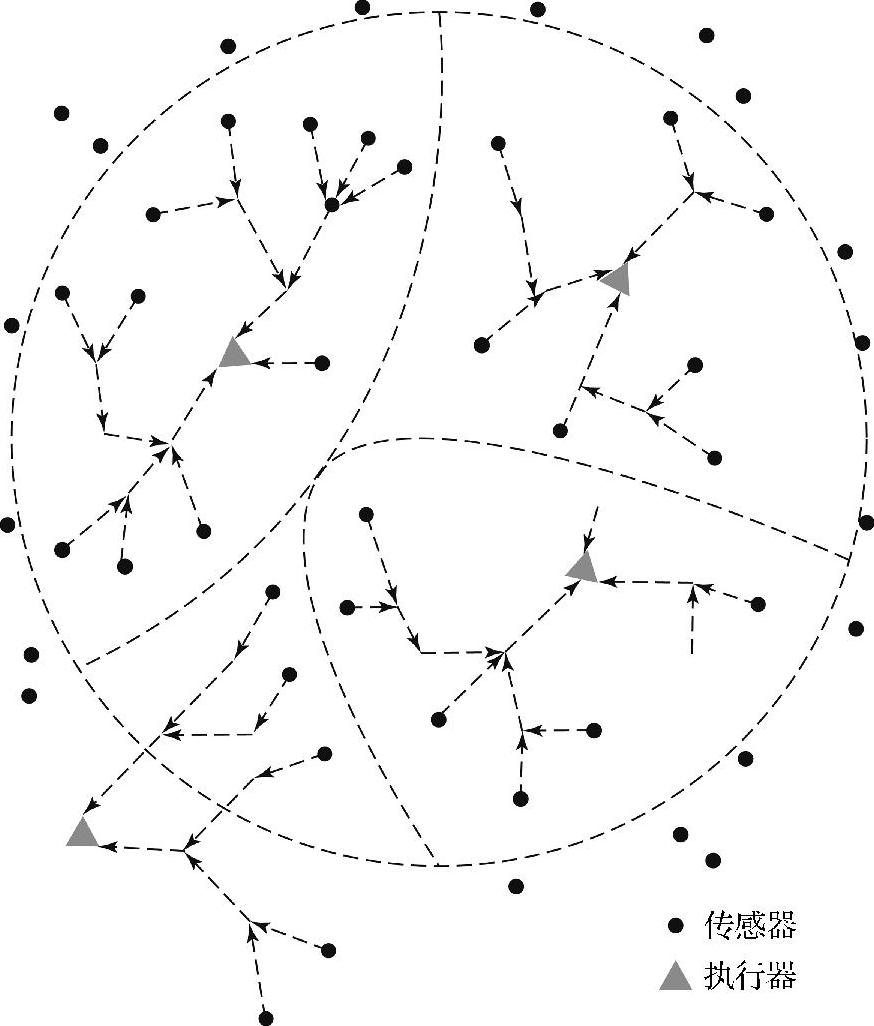
图9-1 从传感器到多个执行器的报告树
假设B是传感器检测某事件和执行器接收事件报告之间的最大允许时延。当执行器接收到数据包时,如果它无法满足延迟限值B,则我们称该数据包是“不可靠的”。否则,我们称数据包是“可靠的”。假定r表示决策区间内可靠数据包与所有生成的数据包之比。参考文献(Melodia et al.,2007)所讨论的传感器-执行器协同问题主要用于建立从每个传感器到执行器的数据路径,使得可靠性比r高于所需的第r个阈值,且与数据传送路径有关的能耗最小化。
事件驱动分区是一个双重性问题:(https://www.xing528.com)
(1)选择传感器报告数据的执行器最优子集;
(2)构建指向所选执行器且满足所需可靠性比阈值的最小能耗数据传送树。
在事件区域中,根节点在执行器的所有树的并集,将传感器集进行隐式分区(见图9-1)。可将该问题看做是一个整数线性规划(Integer Linear Programming,ILP),它可以采用适度规模传感器网络(大约100个节点)来解决(Melodia et al.,2007)。
参考文献(Melodia et al.,2007)进一步提出了一种分布式算法,它假定每个传感器知道自身位置以及其邻居和许多候选执行器的位置,且网络是同步的。如果传感器没有报告数据(缺乏事件),则它处于空闲状态。当检测到事件时,传感器进入到启动阶段,确定发送报告到达的执行器(和传感器分区以及初始数据报告树的生成),寻找到某个执行器的初始路径。生成路径上的传感器如果处于空闲状态,也可以转入启动阶段。初始任务等价于第5章(包括参考文献(Melodia et al.,2007)提出的解决方案)中讨论的任意播问题。传感器无法改变他们发送报告到达的执行器,但可以改变初始生成的数据报告路径,来实现理想级别的可靠性,并确保该等级能耗最小。修改数据报告树(Melodia et al.,2007)的基本思路是:当可靠性比高时,增大延迟,降低能耗;当可靠性比低时,以牺牲能耗为代价减小延迟。在每个决策区间内,每个执行器计算可靠数据包与所有数包的可靠性比r,并周期性地广播其值。当接收到来自于执行器的反馈消息时,处于启动状态的传感器可能进入加速或融合状态,来减小延迟(通过向最靠近目标,但位于传输范围内的邻居发送数据包),或者通过向最近邻居(与数据分发树中的相同)发送数据包,来增大延迟但降低能耗。第7章描述了一种用于当数据在向执行器传输的途中,构建延迟受限能量最优数据报告树的改进型算法。它假定报告延迟与路径上到执行器的跳数成正比。它基于从子节点处采集报告,然后对报告进行融合,并将其传输到相互类似的父节点所需的时间估计值。参考文献(Li et al.,2007)提出了一种不同的模型,它假定每个节点处的延迟与子节点数(加上一个负责与父节点进行通信的子节点)成正比。这一点被采集每个子节点信息时的延迟证明是合理的,由于必须避免碰撞,因而信息采集必须依次完成。
参考文献(Ngai et al.,2006)提出了一种WSAN实时通信框架,它支持事件检测、报告和执行器协同通信。当检测到事件后,传感器将事件报告给附近k跳内的其他传感器(传感器到传感器)。可以通过接收数据融合(已知值的平均)回复来验证事件。然后,将报告传送给最近的执行器,执行器通知附近的执行器,来选择具有响应优先级的最近执行器。当响应执行器开始动作后,最靠近执行器的传感器将通过发送洪泛请求来搜索新的最近的执行器,直至它到达分配给相邻执行器的传感器。文献没有给出传感器-执行器和执行器-执行器通信的细节。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。