



参考文献(Friedman and Korland,2005)提出了一种基于方向的位置更新方案。他们将网络区域划分为二维网格。在初始化阶段,每个执行器使用其位置信息来洪泛整个网络。然后,为了沿网格向每个执行器路由一条消息,每个传感器维护其相对方向(右、上、左或下)。位置更新服从基于方向策略。文献还提出了方案的两种变形LS1和LS2。
考虑执行器所在的网络单元T。在LS1中,所有位于T左侧下面且不低于T的单元标记为右(标记被存储在位于这些单元中的节点处),所有低于T且不在T右边的单元标记为上等,如图8-3a所示。在LS2中,所有位于T左侧下面且高于T的单元标记为右和下,所有位于T右侧且低于T的所有单元标记为左和上等,如图8-3c所示。
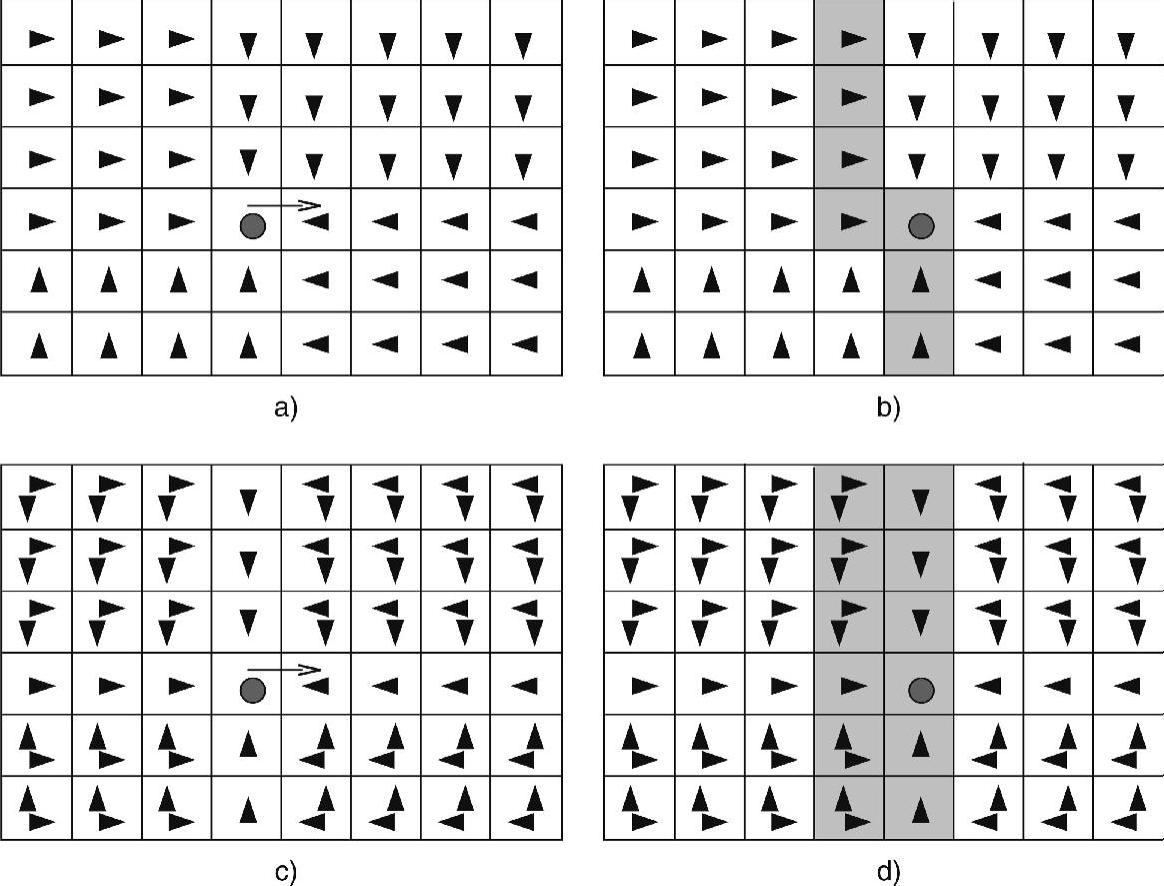
图8-3 基于方向的更新(https://www.xing528.com)
a)LS1——运动前 b)LS1——运动后 c)LS2——运动前 d)LS2——运动后
为了便于描述,我们定义阵列DS={左,下,右,上}。假定执行器从其当前单元,以与方向DS[i]正交的方向DS[(i+1)mod4]沿着其上次所在单元阵列的一部分移动,以及以与方向DS[i]正交的方向DS[(i+3)mod4]沿着最新所在单元阵列的一部分移动时,执行器更新位置消息,如图8-3b所示。在LS2中,它更新上次所在单元阵列和最新所在单元阵列中的全部单元,如图8-3d所示。
为了寻找目标执行器,传感器根据局部记录的执行器在网格单元的相对方向,发送一条搜索消息。接收到搜索消息后,执行器使用其当前位置信息来回复传感器。该算法将位置(确切地说是方向)更新限制在有界区域内,因而减少了消息开销。但是,与本章讨论的基于定额方法类似,空单元的存在要求对算法进行修改。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。