



与前面讨论场景的思路一样,参考文献(Falcon et al.,2009)研究了POI周围的双连通传感器网络部署问题。主要区别是传感器是自身拥有移动能力,因而能够在POI实现自部署。这里,来自于不同潜在远距离地区的传感器部署时间不同步。
所提协议的主要思路是在POI周围逐步构建一个完美三角形网格(正如前面所讨论的,同样由于几何原因选择这种网格结构),以使得传感器移动距离总和最小化。该协议大致工作原理如下:第一个传感器直接移动到POI的确切位置。然后,当部署新的传感器时,它向POI移动,直至进入到已经属于网格的传感器范围。此时,已部署的传感器负责寻找一个合适的网格位置,并要求新节点移动到该位置。
协议的主要目标是在保持网格位于POI附近中心位置的同时,最大限度地降低机器人运动距离的总和。由这些限制条件产生的各种选择如图7-10所示,图中新到达节点(节点N)对面的空网格顶点是可用的。这里,我们应当优先选取移动对角线上的节点,而不是让新节点沿着网格周围移动(因为后者的运动代表总距离非常大)。但是,这种决定意味着网格节点知道或者要在网格中找到空的远程位置。由于强制所有节点记忆(和同步)网格的全局视图不太合理,因而面临的挑战是设计一种节点能够协作地决定将什么目标分配给新节点的分布式协议。需要注意的是,机器人之间运动均匀分布的程度问题可能会在第二步中出现,因为后来要求已经部署的节点再次移动。另一种有趣的结果是描述某个传感器部署时间的上限,以确定传感器初始配置的频度(该时间可能会随着先前部署传感器的数目增大而延长)。(https://www.xing528.com)
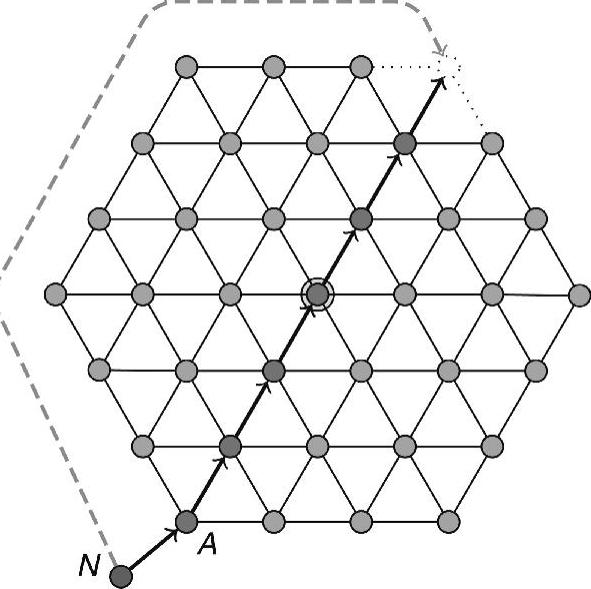
图7-10 实现运动最小化来配置节点
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。