



这里,我们考虑在POI周围部署由移动机器人编队携带的静态传感器问题。我们对参考文献(Li,2009)中提出的方案进行描述。我们将移动机器人的数量认为是任意(且有限)的,每个移动机器人最初装备有任意数目的传感器。然后,问题是协作部署传感器,使它们的拓扑在POI周围形成三角网格。三角网格的选择是由其能够生成近似最优覆盖的有趣几何特性激发的,而使它们具有双连通性是副产品。主要问题是确保部署机器人网络期间,它们移动距离之和最小化。
所提协议的主要步骤如下:首先,机器人随机散布在区域内。它们首先运行诸如贪婪-轮换-贪婪(见参考文献(Li et al.,2007)或第10章)等的辅助协议,来采集POI周围几个同心六边形层中的信息,这几个同心六边形层在局部层次形成了三角网格。我们首先假定机器人数量使得外层是完全的(与图7-8中所示采用7个机器人的六边形类似)。每个机器人开始在其位置上放置传感器,然后整群机器人转换成一个方向,在已经部署的传感器周围形成一个圆形(更准确地说,是六边形),然后在沿着它们的路径放置新传感器。不断重复该过程,直至所有传感器被部署。需要注意的是,每个旋转圈上可部署多层,取决于组直径。
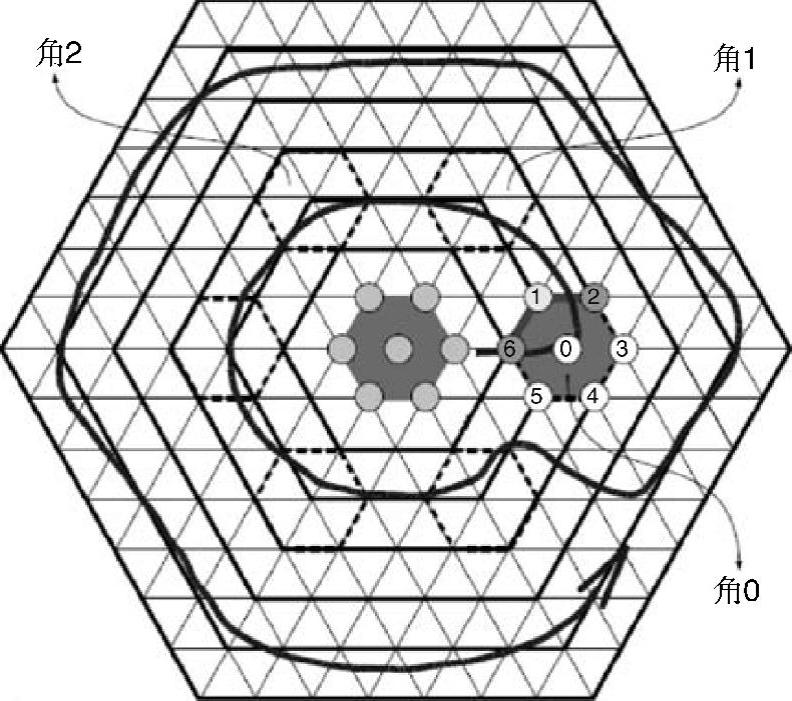
图7-8 使用移动机器人部署的简单情况
我们将那些位于组前面/排头、与当前方向有关的机器人称为前沿机器人(即在初始变换后,六边形上的机器人2、1、6代表组)。前沿机器人是那些遇到空的虚拟网格顶点时,负责放置传感器的机器人。当组到达六边形的一个角时,前沿节点根据新的方向发生变化(在同一实例中,到达第一个角后,新前沿节点将是机器人1、6和5)。如果前沿机器人在某一点上用完传感器,则第二层传感器将接管该任务(如角0和角1之间的5、0和3)。但是,在某些情形中,可能要求组内机器人进行重组,尤其是当机器人中那些传感器的初始能量不均匀时。(https://www.xing528.com)
当机器人的数目与完全六边形不对应时,问题将变得得更加复杂。参考文献(Li,2009)中解决方案的一些草图如图7-9a和图7-9b所示。第一张图片对应于外层仅包含一个机器人的情况。文献提出内部六边形中的机器人像以前那样工作,而位于外层的机器人在遇到某个角时(预计该机器人将成为相对能耗最快的,因而强制组开展更频繁的重组),则会沿着组的周围运动。第二张图片对应于外层六边形包含多于一个机器人的情况。在这种情形下,机器人编队采用不同模式进行移动。编队是六边形,两个机器人位于前端两侧。其他额外的机器人可以放在核心周围,例如在空圆标记的位置。至于前一种情形,当外部机器人遇到角时,将必须在组内进行移动。
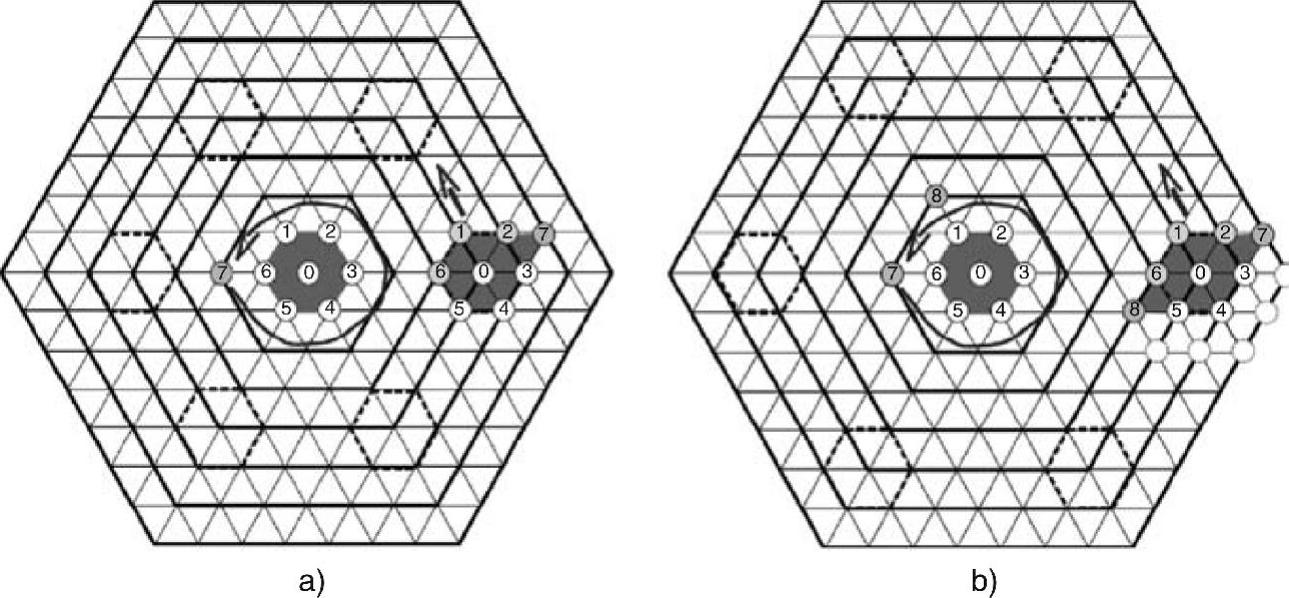
图7-9 机器人编队行为
a)外层中有1个机器人 b)外层中有7个机器人
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。