



在直接接触数据采集中,移动汇聚节点以单跳通信方式,直接从数据源处采集数据。汇聚节点可能会重传数据,或者在需要时从物理上将数据传送给固定基站。这种方法能够实现传感器通信能耗最小化,因为传感器之间不需要相互转发数据。在这种场景中,主要问题是计算汇聚节点最佳轨迹,该轨迹覆盖了所有数据源,且能实现数据采集延迟最小化。
1.随机数据采集轨迹
参考文献(Shah et al.,2003)研究了汇聚节点随机移动性问题,并提出了一种简单的数据采集算法。在算法中,传感器将测量数据缓存在本地,等待移动汇聚节点到来。文献也分析了多汇聚节点场景。每个汇聚节点随机移动,在通信范围内遇到的传感器处采集数据。然后,汇聚节点将采集数据传送到无线接入点(如固定基站)。
在汇聚节点随机移动的情形中,传感器端的能耗主要是由汇聚节点发现和后续数据传输 产生的。假定每个汇聚节点在移动时广播一条信标消息。发现汇聚节点的最简单方法是对无线通信信道进行监测。一旦传感器接收到信标消息,则它可以断定汇聚节点到来。但是,连续进行信道监测的能耗比较高。参考文献(Chakrabarti et al.,2003)提出,如果汇聚节点(如安装在往返班车上)沿着规则路线移动时,则传感器可以通过学习汇聚节点的运动规律曲线来预测它们的到来。
找到汇聚节点后,数据传输也能够以一种智能的方式进行。如果传感器发现汇聚节点后,简单地进行数据的传输,则数据可能无法成功交付,或者要进行许多重传,从而导致能量浪费。根据参考文献(Anastasi et al.,2007a),消息丢失概率会随着传感器与汇聚节点距离的缩短而降低。假定汇聚节点沿直线经过传感器。为了实现能耗最小化,数据传输应当发生在消息丢失概率最小的时段内,该时段正好位于传感器与汇聚节点最小距离点附近。基于这种考虑,参考文献(Anastasi et al.,2007b)提出了一种自适应数据传输协议。在参考文献(Anastasi et al.,2007b)中,可以根据函数 估计第(n+1)次通过时的接触时间
估计第(n+1)次通过时的接触时间 ,其中
,其中 和α(0<α<1)代表上次(第i次通过)接触消耗时间,接触持续时间或接触与数据传输之间的时间间隔,或其他相关度量标准(不同度量标准具有不同的函数和参数)。根据估计结果,传感器在恰当时间开始传输数据,并发送预定数目比特。如果接触时间足够长,在传输数据之前,传感器能够执行一次休眠-唤醒循环,则这么做以节省能量。
和α(0<α<1)代表上次(第i次通过)接触消耗时间,接触持续时间或接触与数据传输之间的时间间隔,或其他相关度量标准(不同度量标准具有不同的函数和参数)。根据估计结果,传感器在恰当时间开始传输数据,并发送预定数目比特。如果接触时间足够长,在传输数据之前,传感器能够执行一次休眠-唤醒循环,则这么做以节省能量。
2.TSP访问数据采集
当汇聚节点移动性是一种可控因素时,我们可以通过合理选择汇聚节点轨迹,来降低数据采集延迟。不难发现,直接接触数据采集这个NP完全问题(Lawler et al.,1985)通常等价于旅行商问题(Traveling Salesman Problem,TSP)。在非正式情况下,TSP问题是:给定城市(即传感器)数,找到最短旅行路线,使得每个城市(传感器)恰好被访问一次,并返回出发城市。
参考文献(Nesamony et al.,2006;Nesamony et al.,2007)将汇聚节点移动问题看做是TSP的一个变形,称为使用邻居的旅行商问题(Traveling Salesman Prob-lem with Neighborhood,TSPN),其中汇聚节点需要对每个传感器的邻居进行一次访问。直觉是为了从传感器处获取数据,汇聚节点只要位于传感器的通信范围(模型为圆盘)就足够了。图6-3a将TSP访问(粗虚线)和TSPN访问(粗线)进行了对比,包含1个移动汇聚节点和4个传感器。

图6-3 TSPN
a)使用邻居的TSP b)点集计算
在参考文献(Nesamony et al.,2007)中,作者提出了一种寻找汇聚节点最佳可能访问路线的算法。该算法要求所有传感器的位置是已知的。它首先确定圆盘的访问次序。在这个过程中,可能会用到一些排序限制条件。例如,必须首先访问那些电池能量即将耗尽的对应传感器,以防止数据丢失。如果不存在限制条件,则最直观的方法是基于代表点的TSP顺序来对圆盘进行排序。可以使用不同方式来选择圆盘的代表点。例如,它可能是一个随机点、中心点或距离起点最近的周边点。
一旦确定了访问次序,即可计算最优点集。初始集是由起点a0和第i个圆盘Ci的代表点a0i构成。然后, 更新为与a0,
更新为与a0, 和圆盘Ci有关的
和圆盘Ci有关的 的过程如下:如果直线
的过程如下:如果直线 与圆C1相交,则
与圆C1相交,则 是交线上的任意点。否则,
是交线上的任意点。否则, 是圆C1周边上的点,满足
是圆C1周边上的点,满足 最小。在后一种情况下,搜索空间是整个C1周边减去a0到C1圆心、
最小。在后一种情况下,搜索空间是整个C1周边减去a0到C1圆心、 到C1圆心两条线段之间的弧,且二分搜索主要用于发现
到C1圆心两条线段之间的弧,且二分搜索主要用于发现 。当计算出
。当计算出 后,
后, 被更新为与
被更新为与 ,
, 有关的
有关的 ,等。最后,
,等。最后, 被更新为与
被更新为与 ,a0,Cn有关的
,a0,Cn有关的 。由新点集定义的汇聚节点访问路线长度要比原来短一些。重复进行采取新点集作为输入的迭代更新过程,直至访问路线长度稳定下来。图6-3b说明了这一过程。
。由新点集定义的汇聚节点访问路线长度要比原来短一些。重复进行采取新点集作为输入的迭代更新过程,直至访问路线长度稳定下来。图6-3b说明了这一过程。
传感器存储空间非常有限。它们只能缓冲有限的数据量。假定传感器有不同的数据生成率λ,某些传感器要比其他传感器访问得更为经常些(与其缓冲溢出时间 有关,其中b是缓冲区大小),以避免数据丢失。参考文献(Gu et al.,2005)研究了缓冲限制条件对于汇聚节点移动性TSP的影响,提出了一种针对汇聚节点移动性的分区调度(Partitioning-based Scheduling,PBS)算法。在PBS中,所有传感器的位置信息都是先验的。传感器被划分为若干组(称为箱子),这样同一箱子Bi内的传感器拥有的缓冲溢出时间变化范围相同,且Bi+1的缓冲溢出时间范围是Bi的两倍。每个箱子又可以根据传感器位置划分为若干个子箱,这样同一子箱内的传感器相互之间的位置靠得非常近。参考文献(Bentley,1975)使用k维数算法实现了这种分区方案。
有关,其中b是缓冲区大小),以避免数据丢失。参考文献(Gu et al.,2005)研究了缓冲限制条件对于汇聚节点移动性TSP的影响,提出了一种针对汇聚节点移动性的分区调度(Partitioning-based Scheduling,PBS)算法。在PBS中,所有传感器的位置信息都是先验的。传感器被划分为若干组(称为箱子),这样同一箱子Bi内的传感器拥有的缓冲溢出时间变化范围相同,且Bi+1的缓冲溢出时间范围是Bi的两倍。每个箱子又可以根据传感器位置划分为若干个子箱,这样同一子箱内的传感器相互之间的位置靠得非常近。参考文献(Bentley,1975)使用k维数算法实现了这种分区方案。
汇聚节点从B1子箱中具有最小缓冲溢出时间的传感器开始访问。它沿着所谓的超循环前进。超循环是由许多箱子的访问循环构成的。按照次序,每个访问循环仅包含一个来自于每个Bi箱子的子箱。在每个访问循环中,Bi的子箱后面是位置最近的Bi+1中的子箱。由于Bi+1中的子箱数比Bi多一倍,因而在超循环中,每个Bi的子箱后面会有两个来自于Bi+1的子箱。图6-4给出了包含四个访问循环的超级循环,其中 是Bi的一个子箱,每个
是Bi的一个子箱,每个 仅包含一个节点。(https://www.xing528.com)
仅包含一个节点。(https://www.xing528.com)
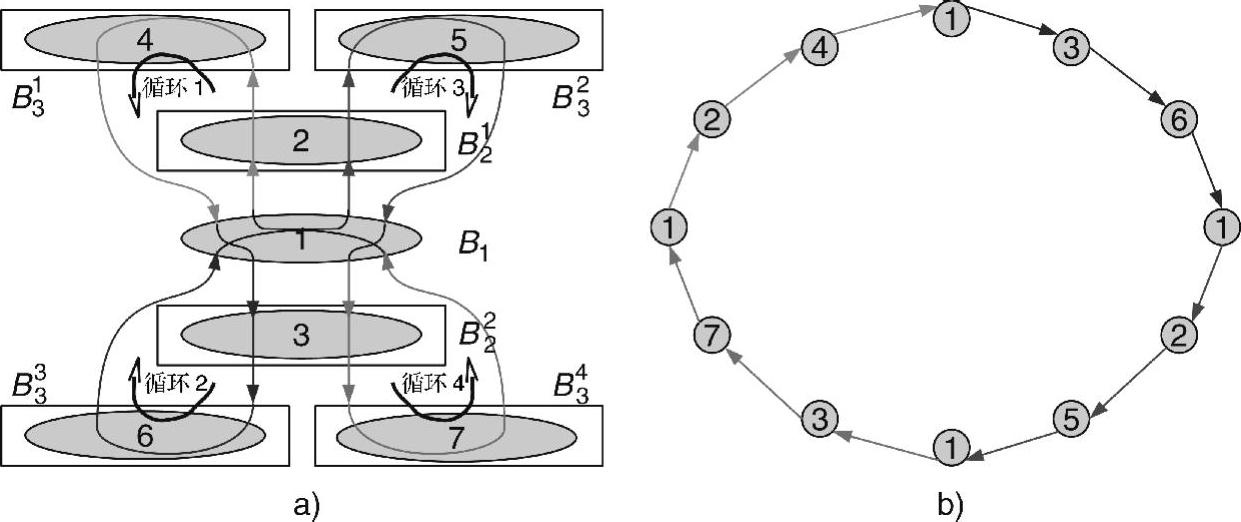
图6-4 四个访问循环组成一个超级循环
a)箱子视图 b)节点视图
在每个子箱中,汇聚节点访问问题可简化为TSP。Prim算法(Prim,1957)可用于计算子箱的最小生成树(MST),且访问次序由预先安排好的树径确定。需要注意的是,在访问完最后一个子箱后,汇聚节点移向下一个子箱中最近的传感器,而不是返回当前子箱第一个受访传感器。一旦构建完路径,无丢失数据采集所需的汇聚节点最低速率可根据 来确定,其中Lmax是针对传感器的两次连续访问之间的最长路径长度,而omin是最短缓冲溢出时间。
来确定,其中Lmax是针对传感器的两次连续访问之间的最长路径长度,而omin是最短缓冲溢出时间。
参考文献(Gu et a1.,2006)研究了区分消息传送问题中的汇聚节点移动性调度。在这种场景下,传输周期性生成的常规消息时,不会出现传感器缓冲溢出的情况,且不定期生成的紧急消息在期限内发送。PBS算法(Gu et al.,2005)提出了一种调度方案,汇聚节点到每个传感器ni的两次访问之间的间隔不大于有效溢出时问eot(oi),该参数与传感器的缓冲溢出时间oi有关,即传感器ni所在箱子的最短溢出时间。但是,如果 ,则PBS解决方案无法保证紧急消息及时传送。参考文献(Gu et al.,2006)建议故意缩短一些传感器的eot,并支持多跳消息中继来处理这种情况。它通过一种新算法来实现,将采用PBS(Gu et al.,2005)的多跳路由到移动单元(Multihop Route to Mobile Element,MRME)作为子程序。
,则PBS解决方案无法保证紧急消息及时传送。参考文献(Gu et al.,2006)建议故意缩短一些传感器的eot,并支持多跳消息中继来处理这种情况。它通过一种新算法来实现,将采用PBS(Gu et al.,2005)的多跳路由到移动单元(Multihop Route to Mobile Element,MRME)作为子程序。
在覆盖传感器处,可以满足紧急消息传输期限,即eot≤△处的传感器。在MRME中,未覆盖传感器处生成的紧急消息,不需要等待现场提取。可以将它们中继到dmax(预定值)跳(从发起方起算)内的附近传感器,汇聚节点多次访问过这些传感器。假定ttr表示每跳传输延迟。如果将传感器nj处生成的紧急消息发送到 跳邻居ni,然后针对无损调度,汇聚节点到ni的两次访问之间的间隔最多应当是
跳邻居ni,然后针对无损调度,汇聚节点到ni的两次访问之间的间隔最多应当是 。对于覆盖其nj的ni来说,汇聚节点访问它的频率至少应当是
。对于覆盖其nj的ni来说,汇聚节点访问它的频率至少应当是 。
。
对于传感器nj来说,缓冲溢出时间缩短将导致汇聚节点访问频率 增加。将相对增加量定义为
增加。将相对增加量定义为 。用C(ni,d)表示ni的未覆盖d跳邻居。在ni的d跳区域Ni,d内,由溢出时间减小带来的ni增益可定义为
。用C(ni,d)表示ni的未覆盖d跳邻居。在ni的d跳区域Ni,d内,由溢出时间减小带来的ni增益可定义为 ,其中β是一个用于调节算法特性的系统参数。在最坏情况下,nj处生成的紧急消息延迟Di可表示为
,其中β是一个用于调节算法特性的系统参数。在最坏情况下,nj处生成的紧急消息延迟Di可表示为
 。使用上述符号,算法MRME的精髓可以描述如下。
。使用上述符号,算法MRME的精髓可以描述如下。
算法MRME的实现分三个阶段。在第一阶段,与PBS一样,传感器被划分为多个子箱,通过检查不等式Di>△是否满足来识别未覆盖节点ni。在第二阶段,一些节点的缓冲溢出时间迭代缩短,直至没有未覆盖传感器存在。在第三阶段,使用修改后的溢出时间来运行PBS,生成一个汇聚节点移动性调度。在第二阶段的每次迭代中,会找到n≤dmax时的Gain(i,d0),且ni的缓冲溢出时间缩短为Δ-d0ttr。然后,重新计算未覆盖节点集,更新网络中的最短溢出时间omin。
3.标签覆盖访问的数据采集
参考文献(Sugihara and Gupta,2007;Sugihara and Gupta,2008)研究了针对数据采集延迟最小化的汇聚节点路径选择问题。作者摒弃了从汇聚节点到每个传感器区域只能访问一次的要求。如果相交路径的长度很短,且每个传感器的通信范围很小,则直觉上我们认为汇聚节点的访问时间会长,因为在这种情况下,汇聚节点必须减速以采集所有数据。只访问一次的要求并不总是制胜策略。多次访问与合理的速率控制也可以得到较好的解决方案。
作者通过将搜索空间缩小为一个完全地理图,来简化路径选择问题。在该图中,顶点位于传感器位置和汇聚节点初始位置。假定汇聚节点沿着图中从顶点到顶点的边移动。每条边与一项成本和一个标签集相关联。成本定义为边的欧氏长度,标签集代表一组通信范围与该边相交的传感器,即当汇聚节点沿着边进行访问时,能够从中采集数据的传感器。图6-5给出了这样一个完全地理图,它是由网络中6个传感器构建的。在该图中,传感器的通信范围用虚线表示,同时还给出了入射到节点5上、与链路有关的标签集。
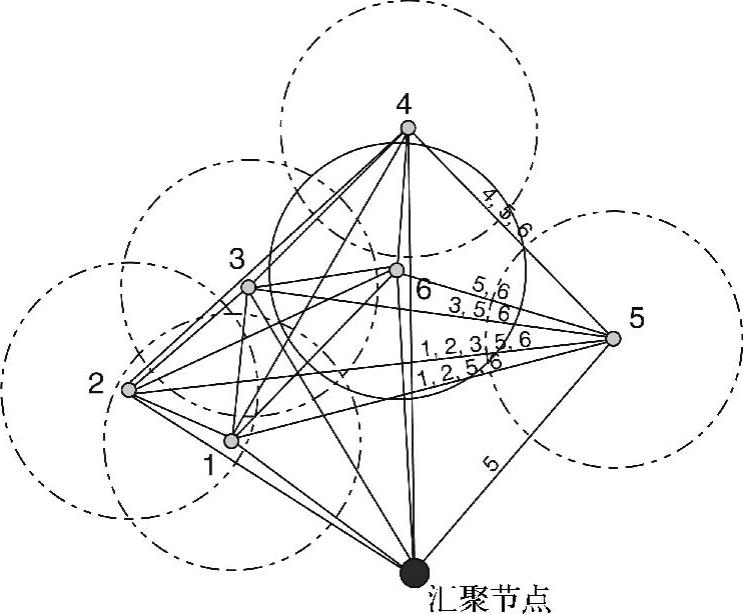
图6-5 传感器与汇聚节点的完全图
目标是找到最低成本访问路径,沿着该路径,汇聚节点可以采集到所有传感器的数据。换句话说,一条最短的访问路径,其相关标签集能够覆盖所有传感器。在这种环境下,汇聚节点不一定访问所有顶点。作者证明最短标签覆盖路径问题是NP难问题,并提出了一种近似算法来解决该问题。算法首先使用任意TSP解决方案,找到了一条TSP访问路线。然后,通过动态编程,通过使用指向T的捷径,得到了最短的标签覆盖路径。采用参考文献(Sugihara and Gupta,2007)中的速率控制算法和作业调度算法,作者用实验验证了算法的有效性,并证明当传感器通信范围较大时,它比类似TSP的算法具有更优的性能。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。