



在任意播问题中,源节点希望将信息发送到属于给定目标集的任意节点。在IP网络环境中,RFC 1546最先对该问题描述如下:“主机向任意播地址传输数据报,互联网负责为至少一个目标提供数据报的尽力而为传送,且最好只有一个目标”(后来,RFC 2373针对IPv6环境,对该描述进行了修订)。但是,许多论文在解决不同问题时,涉及任意播问题。例如,在参考文献(Chen et al.,2004;Jeon and Kesidis,2007)中,术语任意播对应于某些地域群播的第一阶段(见第5.2节),它支持数据到达给定地理区域内的任意节点。
当传感器准备将数据报告给执行器,但不关注哪个执行器会有效接收该报告,即可采用任意播。在本节中,我们主要讨论这种情况。任意播协议应当能够到达距离报告事件最近的执行器,以实现由报告引发的能耗最小化。最后,任意播协议必须考虑执行器可能散布于整个网络中的情况。
许多任意播协议是为有线网络设计的(Wu et al.,2007),只有几种协议是针对无线网络设计的,且大多数是针对有线网络的任意播路由协议的修正版(Awer-buch et al.,2003),这些协议依赖于洪泛技术。在其他针对无线传感器网络的任意播协议中,参考文献(Hu et al.,2005)针对每个事件源构建了一棵最短路径任意播树,树根为每个源节点。汇聚节点只是树叶,且能够动态地加入/离开树,树会相应地进行更新。数据被传送到树上最近的汇聚节点。这样,算法可以同步维护指向汇聚节点的路径,且需要记忆路由步骤。基于洪泛的算法在大型网络中成本变得非常高,而那些基于全局结构(如树)的算法,当网络规模变大或成为动态时,其构建和维护成本会非常高。正是由于这些原因,在传感器与执行器环境中,比较适合采用基于位置(地理)的局部协议,虽然它们要求传感器节点知道执行器的位置信息。
这里,我们引入几个符号。下面几段将会用到这些符号。给定两个节点u和v,我们用|uv|表示两个节点之间的距离。给定距离d,我们用power(d)表示在该距离上传输一条消息需要消耗的功率。该功率大致与dα+c成正比,其中α代表信号强度衰减因子,c是一个常数,代表传输导致的最小能耗(更多能量模型见第1章)。最后,给定传感器节点s,我们用A(s)表示最靠近s的执行器。
第一个基于位置的任意播协议是由参考文献(Melodia et al.,2005)提出的。该协议试图实现能耗最小化,其工作原理如下:在启动阶段,每个传感器节点s选择它的一个邻居充当指向某个执行器的下一跳节点。通过选择能够实现power(|sn|)+power(|nA(n)|)最小化的邻居n,可以完成该过程。无论作者如何宣称,这种局部任意播算法无法实现真正意义上的功耗优化,因为邻居选择是基于长边|nA(n)|的,这无法实现功率最优。同时,该协议无法确保空穴区的数据传输。
参考文献(Mitton et al.,2009)提出了3种基于位置的局部协议。这些协议是针对任意播环境中GFG原理的3种不同修正版,因而能够保证指向目标节点(即任意执行器)的数据传输。第一个协议GFGA试图实现跳数最小化,第二个协议COPA和第三个EEGDA主要关注能耗最小化问题。下一段我们将简要描述这3种选择方法。
(1)GFGA选择能够实现|nA(n)|最小化(|sA(s)|-|nA(n)|最大化)的邻居n。换句话说,它选择能够提供指向任意执行器最快进度的邻居。需要注意的是,在这个公式中,A(s)和A(n)可能是不同的,这反映了任意播的核心概念。(https://www.xing528.com)
(2)COPA依赖于成本进度比(见参考文献(Kuruvila et al.,2005),或第4.3节),成本为下一跳的能耗估计值,进度为指向任意执行器的距离进度。更准确地说,对于传感器s来说,选择能够实现power(sn)/sA(s)-nA(n)最小化的邻居n(人们还提出了两种更为复杂的变形,但性能非常类似)。
(3)EEGA是COPA的增强版,其灵感来自于EtE协议(Elhafsi et al.,2008)。这种解决方案比COPA更节能,但计算复杂性比较高。它的基本思路是选择邻居n为下一跳节点(根据任意能量相关成本公式),有时使用一个或多个额外邻居到达n(尤其是当信号强度衰减因子α比较高时),可能会更加节能。这可以通过计算从当前节点到每个邻居的能量加权最短路径(Energy-weighted Shortest Path,ESP)来实现(它能够在本地完成,因为节点知道其邻居的位置),然后将消息转发给指向n的ESP上的第一个节点。
关于任意播问题,所有这些解决方案的本质是在路由过程中,目标节点可以发生变化,如果条件允许,可以选择另一个执行器。这种场景如图5-14所示,其中传感器节点S准备启动一次报告过程。根据与执行器的相对距离S选择A1作为目标节点,然后启动针对该目标的贪婪进度。一旦到达B,不存在与任意执行器的距离比B与A1的距离近的邻居。这样,协议切换到恢复模式(此处启动了一次右手面遍历过程)。如果此处采用GFG的单播版,则恢复模式将继续进行,直至到达节点D,指向A1的贪婪进度继续进行。但是,此时节点C注意到执行器A2与C之间的距离要比A1与B之间的距离近。于是,A2被选为新的目标节点,指向它的贪婪模式继续进行。最后,当接收到消息后,节点E在不中断贪婪进程的前提下,执行最后一次修改,将目标节点切换到A3,因为它比A2更近。
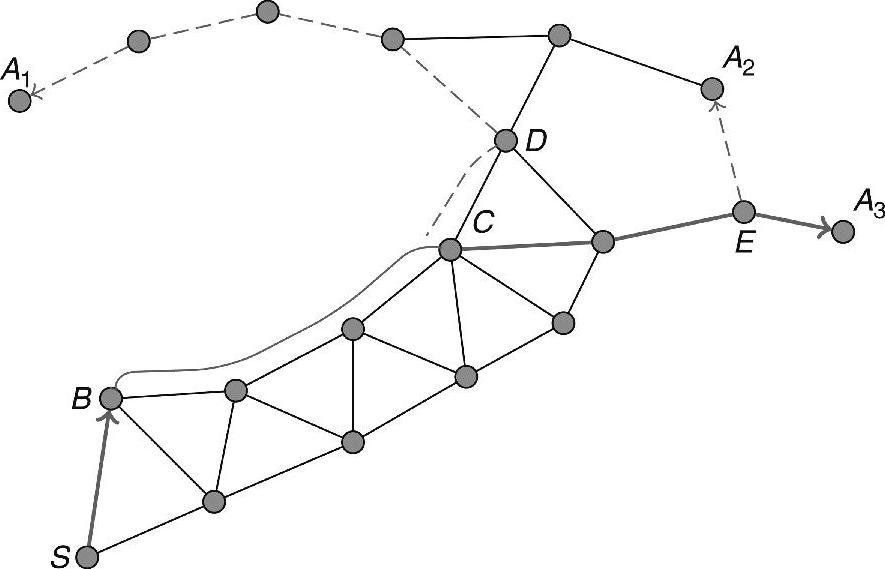
图5-14 基于GFG修正版的地理任意播
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。