



参考文献(Liu et al.,2009)提出了两种局部地理多速率组播协议:最大速率组播(Maximum Rate Multicast,MRM)和最优速率成本组播(Optimal Rate Cost Multicast,ORCM)。这两种协议与PBM和GMR类似(第5.1节已描述过),它们都是将GFG原理(见参考文献(Bose et al.,1999)或第4.5节)扩展到组播环境中,并将无线组播优势考虑在内。主要区别在于在决策时,它们考虑了不同速率,目标是为了实现前一段中所描述的基于速率的度量最小化。假设方面,协议采用了一种没有损耗的理想MAC层,每个节点都能单独以最大速率向目标节点转发数据。通过查找与目标位置相关的局部邻居位置,每个节点可以独立地选择路由。既不存在路由表,也不需要构建全局覆盖结构。最后,在两个连续路由任务之间,网络拓扑可以发生变化。如果拓扑发生变化,除了更新目标节点或源节点的新位置的成本之外,不存在其他成本。
两种协议的区别在于它们的贪婪模式。贪婪模式如下:在每一跳上,当前节点选择下一个转发节点集。每个节点被赋予向一个或部分目标节点发送数据的职责,且在后期不断重复相同的选择过程,直至到达目标节点。提出的两种协议唯一区别在于它们在每一跳上选择恰当邻居的方法。第一种协议MRM,通过赋予那些要求紧急的目标节点高优先级来实现线性选择,而第二种协议ORCM通过将距离进程与速率行期进行组合,来评估各种不同可能的路由选择,从而实现了更一般的最佳成本进度比概念(见参考文献(Kuruvila et al.,2005)或第4.3节)。
需要注意的是,为了采用这些路由方案,除了节点自身位置信息外,消息报头必须包含目标节点的速率要求。
1.最大速率组播(MRM)协议
MRM的基本思路是优先考虑那些速率要求最高的目标节点。更准确地说,在每一跳上,当前节点考虑那些速率要求最高的目标节点,来确定哪个邻居能够提供指向该目标节点的最快进度。选择邻居之后,将它提供进度的所有目标节点分配给该邻居。然后,不断针对剩余目标节点重复该过程,直至将所有目标节点分配给邻居。最后,消息被发送。图5-12给出了该过程的一个简单应用场景。
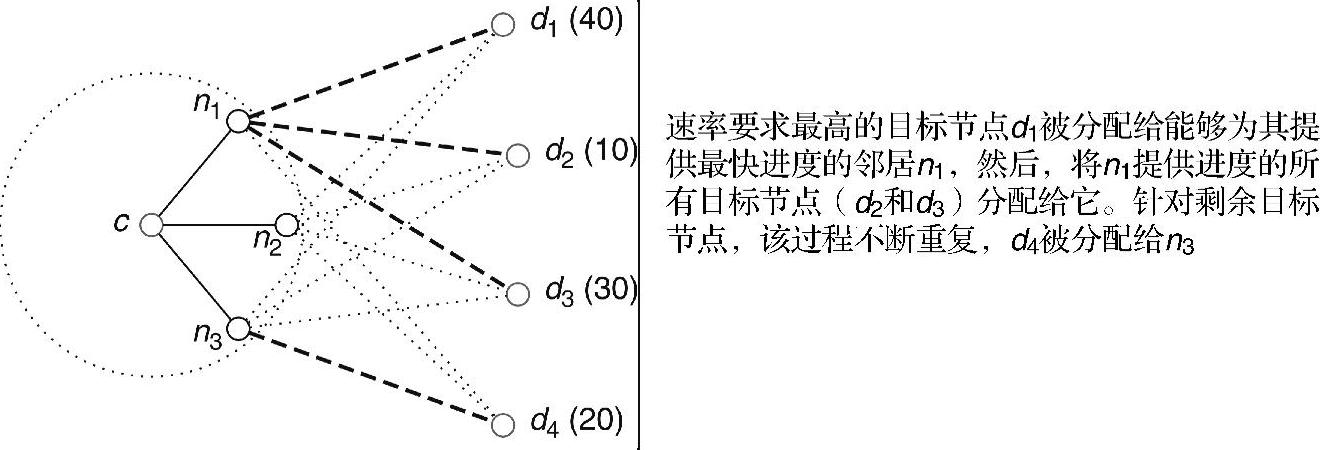
图5-12 MRM的应用场景实例
2.最优速率成本组播
根据PBM和GMR(两种协议在上面的第5.12节中进行了讨论)的实例,OR-CM的思路是评估不同路由选择,然后选择评价最好的。为了保持计算复杂性适中,ORCM根据目标节点数来调整策略。如果目标节点数低于某个给定阈值,则ORCM通过生成和评估所有可能的组合(即目标子集或划分的所有可能配置,以使得每个子集的目标节点分配给同一邻居),采用与PBM相同的策略。如果目标节点数高于某个给定阈值,则它采用GMR的策略,即计算一个初始默认划分(根据能够为目标节点提供服务的最佳邻居,来对目标节点进行分组),然后以迭代方式启动一个合并进程,来对其进行优化。
我们考虑图5-13中给出简单的场景。当前节点c要选择指向d1、d2、d3和d4(每个目标节点可能具有不同的速率要求)的下一跳转发节点,且针对不同目标节点,可以选择仅使用n1、仅使用n2或同时使用n1和n2。这里,我们描述两种高级策略,选择哪种策略取决于目标节点数(4)是低于阈值,还是高于阈值。
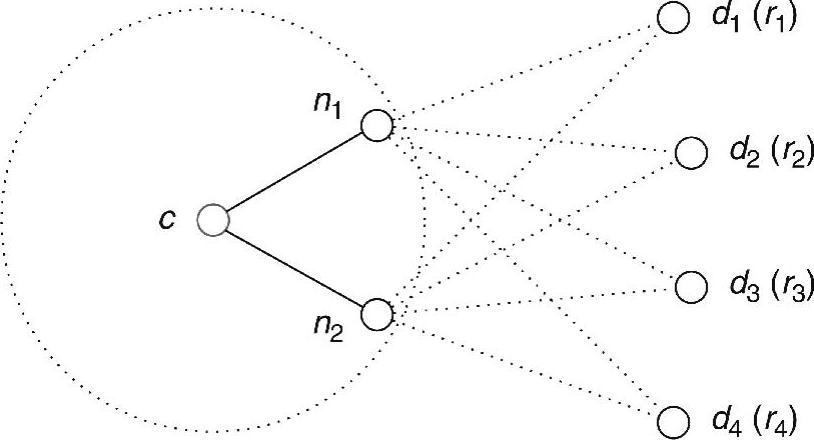
图5-13 ORCM应用场景实例
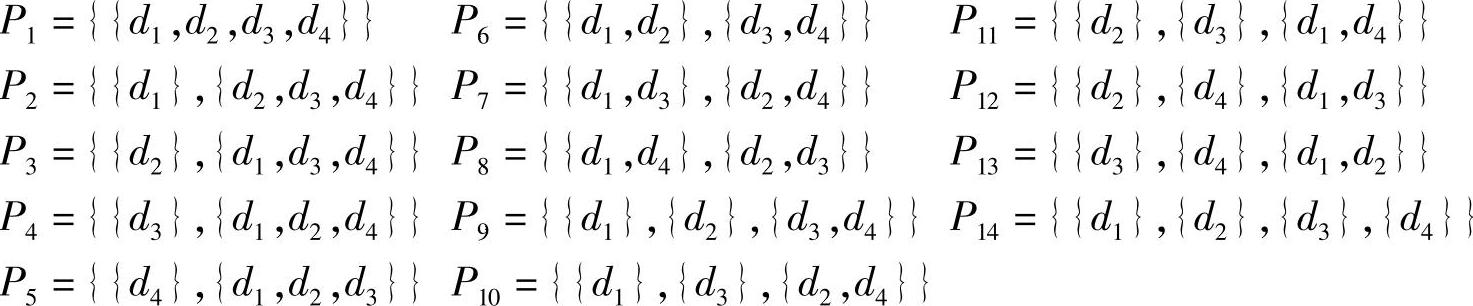
策略1:对所有目标节点集划分进行评价。目标节点有14种划分方法:
 (https://www.xing528.com)
(https://www.xing528.com)
由于这边仅考虑了两个邻居,从P9到P14的划分是不可行的,因而将其丢弃。然后,ORCM对从P1到P8的每个划分进行评估,然后选择评价最好的。基于这种最佳划分,将每个子集分配给指定邻居(该邻居能够实现指向对应目标节点的剩余距离最小化)。
策略2:初始划分与合并过程
当采用GMR协议时,生成一个初始划分,每个子集代表最佳邻居相同的目标节点,从而有P′={{d1,d2},{d3,d4}},其中n1为{d1,d2}提供服务,n2为{d3,d4}提供服务。然后,合并过程形成P″={d1,d2,d3,d4},因为它比P′评价好。这样,所有目标节点都被分配给同一邻居(该邻居能够实现指向这些目标节点的剩余距离最小化)。
针对给定划分的评价问题,与GMR一样,ORCM实现了成本进度比概念。但是,此处给出的成本进度比公式目标是实现基于速率的新度量最小化。参考文献(Liu et al.,2009)给出了给定划分的成本进度比计算方法,但其中一种方法总比其他两种方法好。因此,我们主要介绍这种方法。为了简化公式,我们引入如下符号:
(1)给定目标节点集D={d1,d2,…,dD},符号rate(D)=max(rate(d):d∈D)代表这些目标节点中的最高速率。
(2)给定当前节点c,它的一个邻居n和目标节点d,符号progress(c,n,d)=dist(c,d)-dist(n,d)表示n提供从c到d的进度。
(3)给定当前节点c,它的一个邻居n和目标节点集D={d1,d2,…,dD},符号progress(c,n,D)= progress(c,n,di)代表n提供从c到这些目标节点的累积进度。
progress(c,n,di)代表n提供从c到这些目标节点的累积进度。
(4)最后,N(c)代表节点c的邻居集。
给定划分P={M1,M2,…,MD},其中每个Mi是一个子集,定义为所有子集速率之和除以所有最大子集距离进度之和。这种方法的直观思路是为每个独立子集,选择最适合整个目标节点集的转发邻居:

需要注意的是,对于任意子集来说,如果progress(c,n,Mi)∶n∈N(c)为负数,则丢弃相应划分。
在基于速率的新指标中,当考虑的目标节点数较小(即当ORCM计算所有可能的组合)时,仿真结果表明,ORCM比MRM具有微弱优势,而在其他情况下,MRM具有较大优势。MRM还具有较低计算成本的优势,即使当ORCM不考虑所有目标节点集划分时。关于这些协议的绝对效率,将它们与一系列单播协议进行对比的仿真已经开始进行,且表明在总体成本方面,这些协议比单播之和具有较大优势。需要注意的是,随着速率分布变化加剧,单播之和比不是基于速率的组播协议(这些协议采用最高速率向所有节点发送消息)效率更高。一个有意思的问题是这些协议是如何与最优解决方案进行比较的。回答这个问题需要现在就为这个NP完全问题设计较好的近似算法。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。