



参考文献(Sheu et al.,2007)提出了一种局部协议,主要用于在异构传感器网络中寻找一组连通传感器节点,来覆盖所需区域。传感器节点的SR和CR可能不相同。对于某个传感器来说,如果SR>CR,则它可能需要经过多跳才能到达其感知邻居。由于在实践中通常为CR>SR,这种情形仅具有理论研究价值。协议包括3个阶段:邻居发现、自修剪和主动感知邻居发现。
每个传感器通过使用“问候”消息,收集与其感知邻居有关的信息(邻居发现)。节点信息包括节点ID、感知范围、位置和优先级。优先级既可能是剩余能量、感知范围,又可能是通信程度,还可能是几种指标的组合(假定节点的优先级是不同的)。需要注意的是,如果SR>CR,则节点需要洪泛方案来学习其感知邻居。节点只有在该阶段需要进行消息交换。在其他两个阶段,每个节点在决策时,不需要与其他节点进行通信。
在自修剪阶段,每个节点决定是否处于激活状态。如果某个节点的感知区域未被其高优先级感知邻居的并集完全覆盖,则该节点决定处于激活状态。这一阶段之后,要求区域被主动感知节点完全覆盖。
在主动感知邻居发现阶段,每个感知节点A确定主动感知邻居。若干个感知邻居可能会覆盖节点A周长的同一部分。如果节点A的一部分周长被节点B所覆盖,且节点B在所有覆盖节点A周长的感知邻居中优先级最高,则节点A认为感知邻居B是激活的。
假定感知范围是优先级,且感知范围较大的节点具有较高的优先级值。在如图3-4所示的实例中,假定节点优先级次序为A<B<C<D<E<F<G。在自修剪阶段,由于节点A、B、D、E、F、G的感知区域未被高优先级邻居完全覆盖,因而这些节点决定处于激活状态。由于节点A的优先级比节点B低,因而节点B是主动的,而节点C是被动的,因为节点F和G的优先级都比节点C高。在主动感知邻居发现阶段,节点G的周边被其感知邻居分成若干个部分。由于S1、S4和S5片段分别仅被节点A、D和F所覆盖,因而节点G将节点F视为主动感知邻居。由于S2片段被节点A、B所覆盖,且节点B的优先级比节点A高,因而节点G将节点B视为主动感知邻居。同样,S3片段被节点B和D所覆盖,但它也被节点E所覆盖,节点E的优先级比节点B和D都高。因此,节点G将节点E也视为主动感知邻居。(https://www.xing528.com)
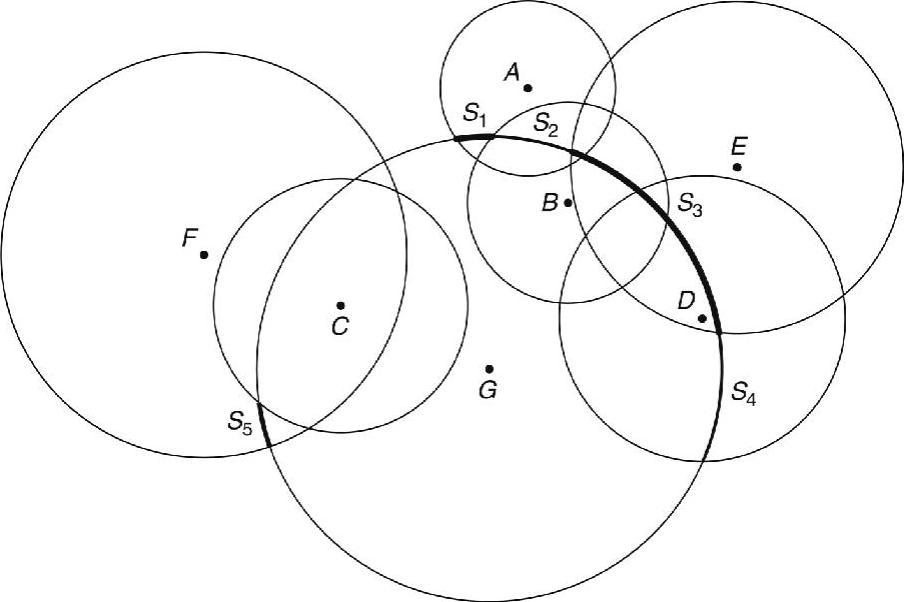
图3-4 基于区域支配集的覆盖
需要注意的是,某个节点根据高优先级感知邻居的覆盖情况,决定处于被动状态,且一些邻居也决定处于被动状态。但是,在完成此项任务时,这些邻居也被视为高优先级覆盖邻居。对于被覆盖的每个块区域,这会形成一个高优先级感知邻居链,且优先级最高的邻居必须是主动的。因此,主动邻居集确实覆盖了原始区域。连通性是根据通往每个感知邻居(包括那些被认为是主动的邻居)初始构建的路径得出的。所提出的协议既可以应用于同步网络,又可以用于异步网络,因为只有邻居发现阶段进行了消息交换。在同步模式中,最初决策是通过采用交换“问候”消息做出的。最后,当网络动态发生变化时,可以对此进行局部和异步处理。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。