



【摘要】:图8-3 普通圆柱蜗杆传动的几何尺寸表8-3 普通圆柱蜗杆传动的主要几何尺寸计算公式表8-4 蜗杆螺纹部分长度b1、蜗轮外径de2及蜗轮宽度B的计算公式2.蜗杆传动的变位简介变位蜗杆传动主要用于配凑中心距或改变传动比,使之符合推荐值。蜗轮变位系数常用范围为-0.5≤x2≤+0.5。
1.几何尺寸计算
普通圆柱蜗杆传动的几何尺寸见图8-3,主要几何尺寸计算公式见表8-3及表8-4。
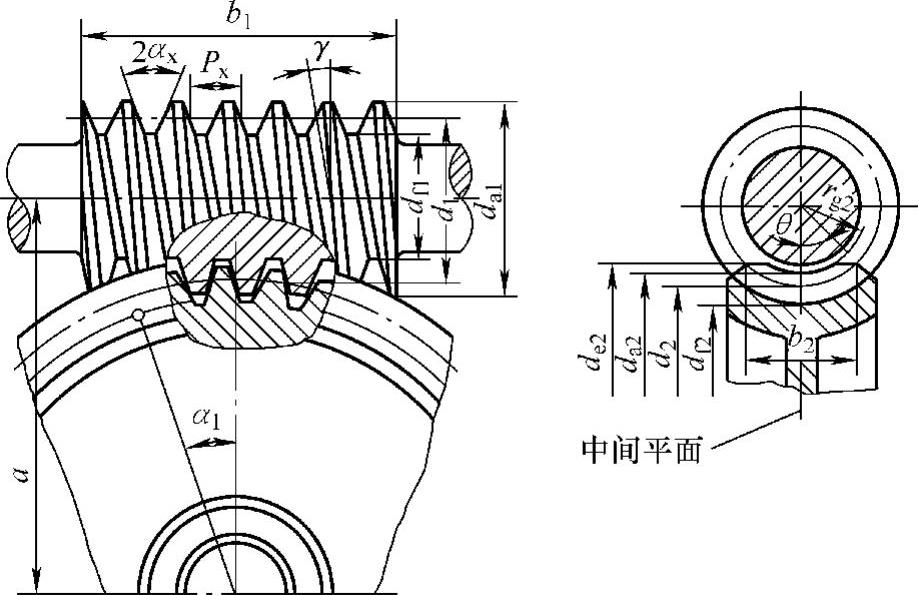
图8-3 普通圆柱蜗杆传动的几何尺寸
表8-3 普通圆柱蜗杆传动的主要几何尺寸计算公式
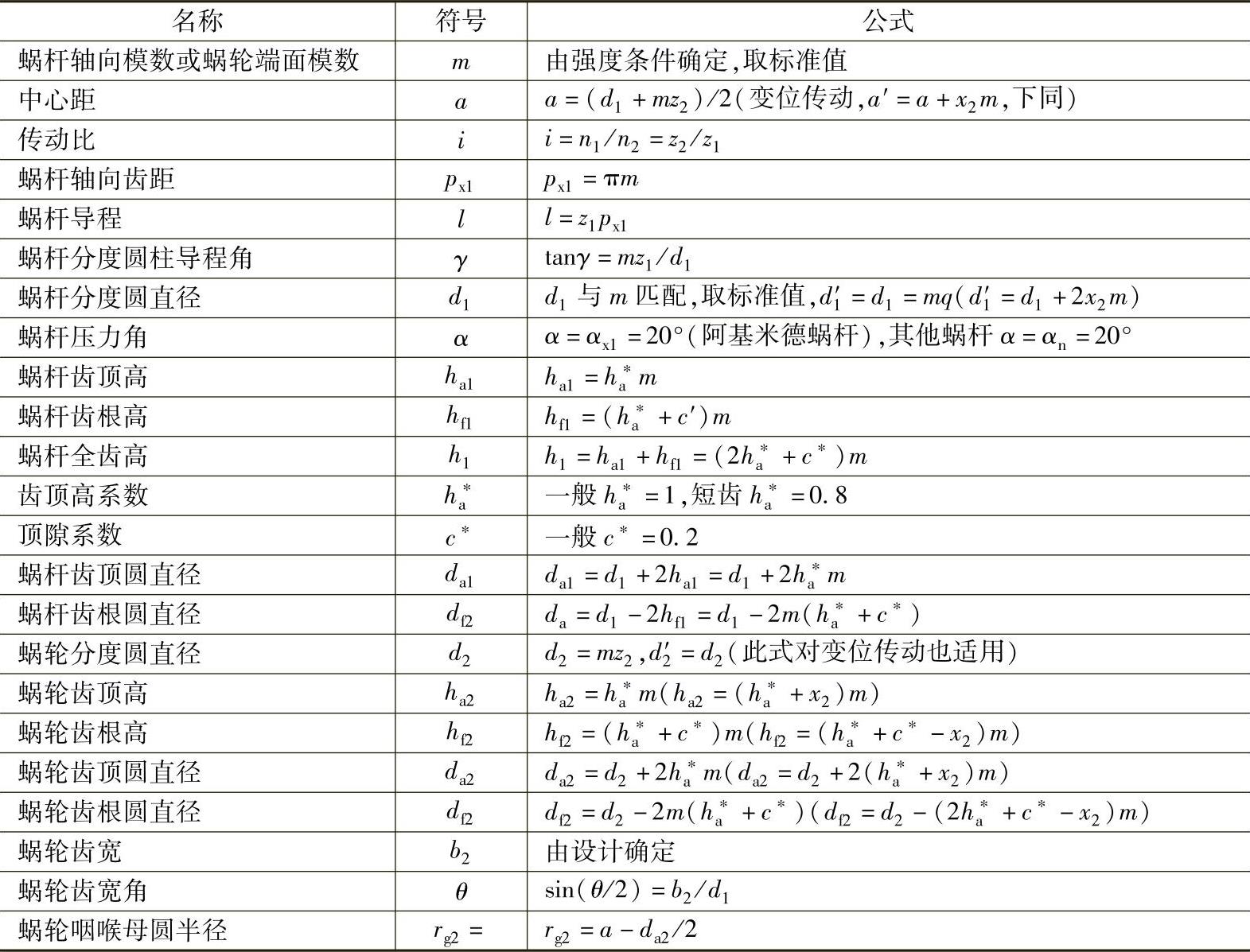
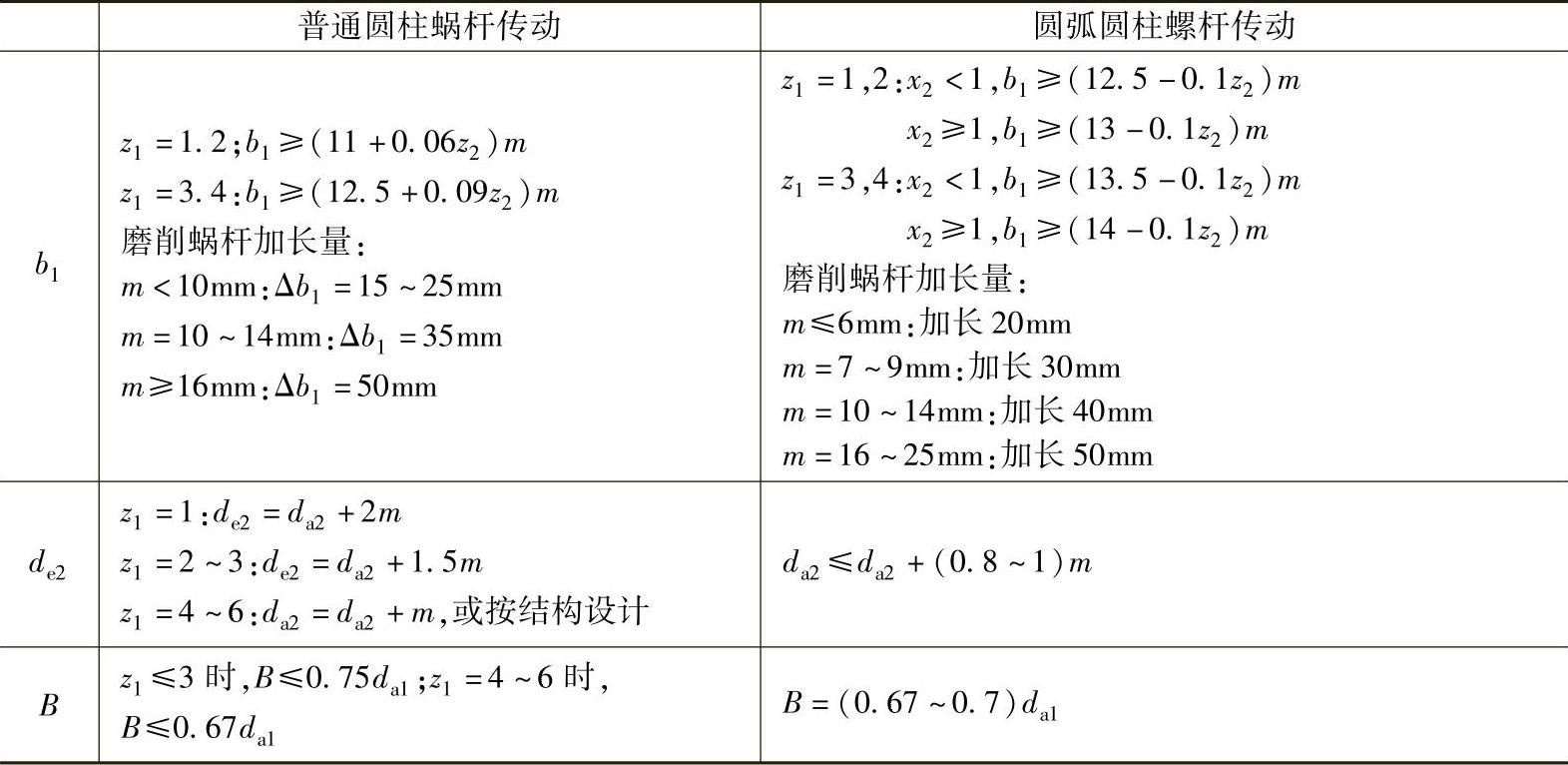
表8-4 蜗杆螺纹部分长度b1、蜗轮外径de2及蜗轮宽度B的计算公式
2.蜗杆传动的变位简介
变位蜗杆传动主要用于配凑中心距或改变传动比,使之符合推荐值。变位方法即不改变刀具尺寸,利用刀具相对蜗轮毛坯的径向位移来实现变位。但是在蜗杆传动中,由于蜗杆的齿廓形状和尺寸要与加工蜗轮的滚刀形状和尺寸相同,所以为了保持刀具尺寸不变,蜗杆尺寸是不能变动的,因而只能对蜗轮进行变位。其变位特点是蜗杆变位前后顶圆、根圆、分度圆、齿厚的尺寸不变,变位后分度圆与节圆不重合;蜗轮变位前后节圆与分度圆始终重合,其他尺寸有变化。
(1)调整中心距而不改变传动比的变位 这种变位前后蜗轮齿数保持不变,即z2′=z2,而传动的中心距发生变化,即a′≠a,变位后蜗杆与蜗轮的节圆直径分别为
d1′=d1+2mx2(https://www.xing528.com)
d2′=d2=mz2变位后的中心距a′为

据此可求出变位系数x2为

式中 a′、z2′——变位后的中心距和蜗轮齿数;
x2——蜗轮变位系数。
蜗轮变位系数常用范围为-0.5≤x2≤+0.5。
(2)调整传动比而不改变中心距的变位 这种变位前后传动的中心距保持不变,即a′=a,而蜗轮齿数发生变化,即z′2≠z2,通常将蜗轮齿数增加或减小一两个齿,这时,传动的啮合节点发生了改变,中心距可表示为

故z2′=z2-2x2,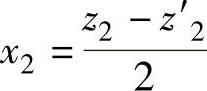 。
。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。