



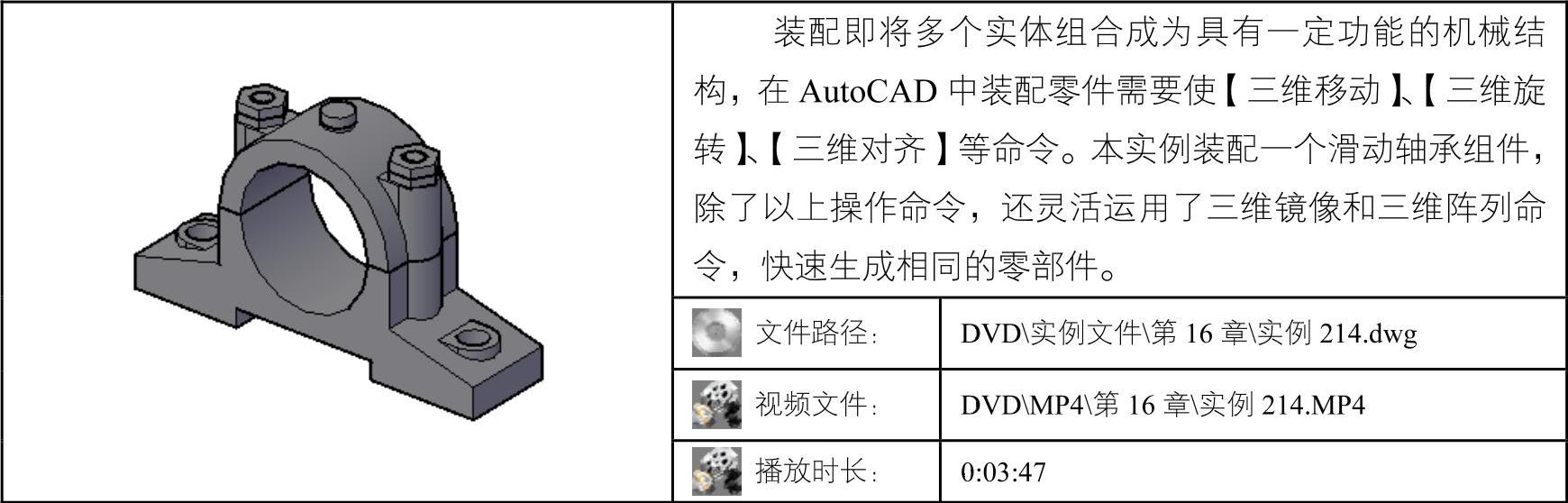
01 打开素材文件“\素材文件\第16章\实例214”,模型空间包含滑动轴承的5零部件,如图16-12所示。
02 选择菜单【修改】│【三维操作】│【三维对齐】命令,选择轴承盖为对齐的对象,然后依次选择三个基准点a、b、c,如图16-13所示,接着选择三个对齐点a'、b'、c',对齐的结果如图16-14所示。
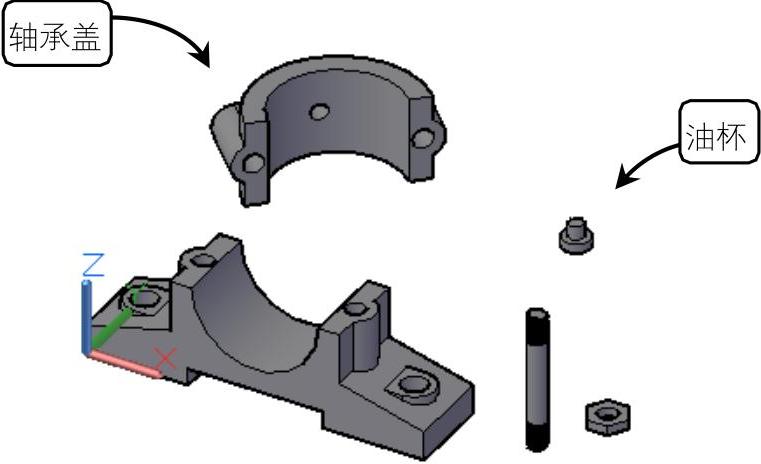
图16-12 轴承零件
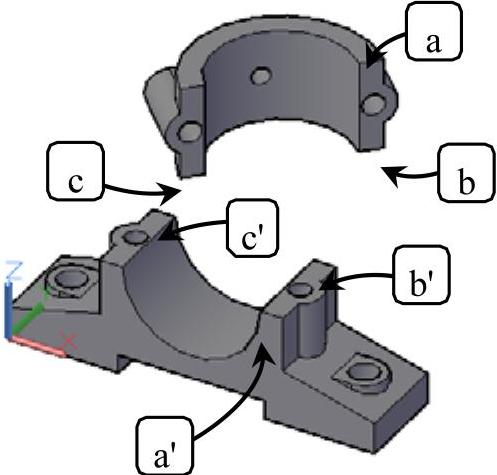
图16-13 选择对齐点和目标点
03 选择菜单【修改】│【三维操作】│【三维旋转】命令,选择油杯为旋转的对象,捕捉到如图16-15所示的圆心为旋转基点,旋转控件移动到该点。然后选择控件上的X轴(红色)为旋转轴,输入旋转角度90°,旋转的结果如图16-16所示。
04 选择菜单【修改】│【三维操作】│【三维移动】命令,选择油杯为移动的对象,捕捉到如图16-16所示的圆心位置作为移动基点,注意不要捕捉到方向轴,然后捕捉到油杯孔圆心作为目标点,移动的结果如图16-18所示。
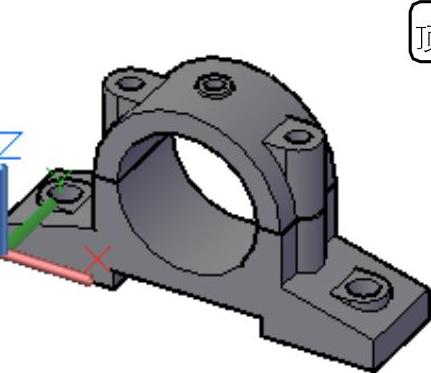
图16-14 对齐的结果
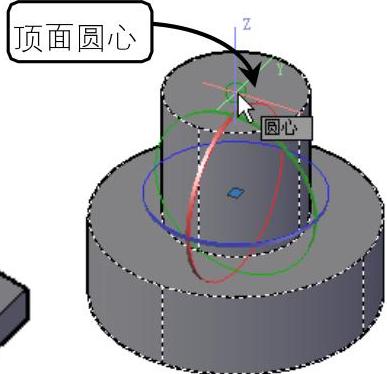
图16-15 选择旋转基点
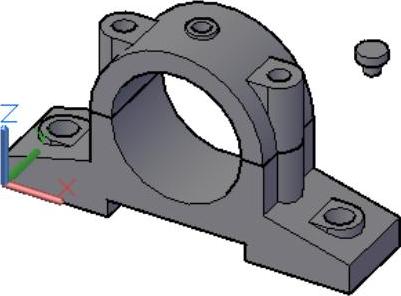
图16-16 旋转油杯的结果
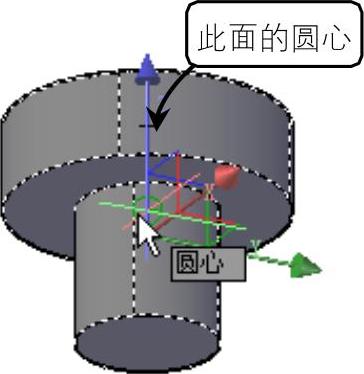
图16-17 选择移动的基点
05 将模型的视觉样式修改为“二维线框”样式,选择菜单【修改】│【三维操作】│【三维移动】命令,选择螺柱为移动的对象,捕捉到螺柱底面圆心为移动基点,然后捕捉到圆柱孔的底面圆心,作为移动目标,如图16-18所示。移动的结果如图16-19所示。
06 再次使用【三维移动】命令,选择六角螺母为移动的对象,捕捉到螺母底面圆心为移动基点,然后捕捉到螺柱顶面圆心为目标点,移动的结果如图16-20所示。
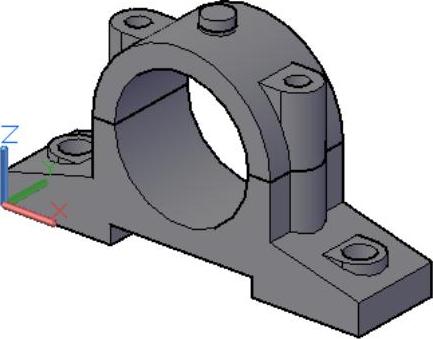
图16-18 移动油杯的结果(https://www.xing528.com)
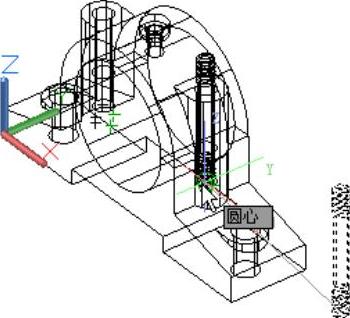
图16-19 捕捉移动目标点
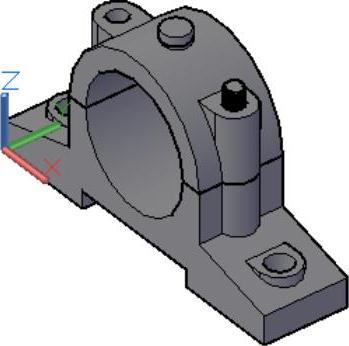
图16-20 移动螺柱的结果
07 再次使用【三维移动】命令,选择六角螺母为移动的对象,捕捉到螺母底面一个顶点为移动基点,然后捕捉到如图16-21所示的圆弧中点作为目标点,移动的结果如图16-23所示。
08 选择菜单【工具】│【新建UCS】│【Z轴矢量】命令,在轴承座圆心位置新建UCS,使Z轴方向沿轴向,如图16-24所示.
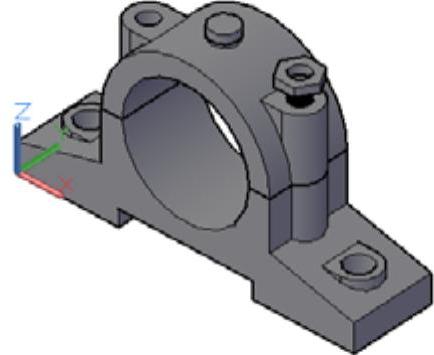
图16-21 移动螺母的结果
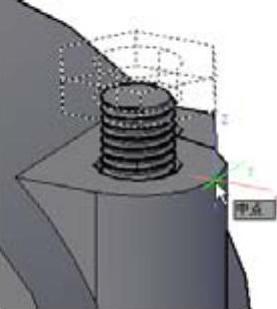
图16-22 捕捉移动目标点
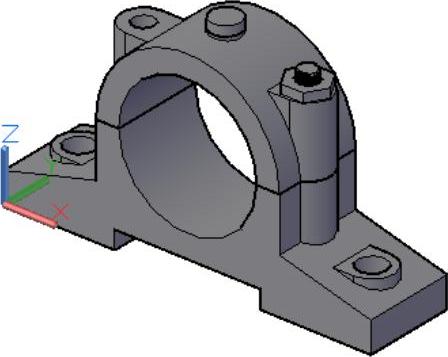
图16-23 再次移动螺母的结果
09 选择菜单【修改】│【三维操作】│【三维镜像】命令,选择螺柱为镜像对象,在命令行选择YZ平面为镜像平面,然后输入镜像平面上点的坐标为(0,0,0),镜像的结果如图16-25所示。
10 选择菜单【修改】│【阵列】│【矩形阵列】命令,选择六角螺母为阵列对象,将列数设置为2,列间距设置为-90,将行数设置为2,行间距为5,阵列的结果如图16-26所示。
图16-24 新建UCS
图16-25 镜像螺柱的结果
图16-26 阵列螺母的结果
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。