



【摘要】:图4-104 在编辑程序窗口中设定机器人动作范围3)根据“Show Robot Work Space”中复选框的选择,编辑画面相应显示出机器人腕关节“O”点或“P”点的动作范围,如图4-105所示。在菜单项目栏中选择“Robot”目录下的“Work Space”→“SidePT-O”子目录,即可显示出机器人腕关节“O”点的球形动作范围,如图4-106所示。
1)在编辑程序窗口中显示机器人动作范围的设定。TA1400机器人“O”点和“P”点在横向截面及纵向截面的动作范围如图4-103所示。
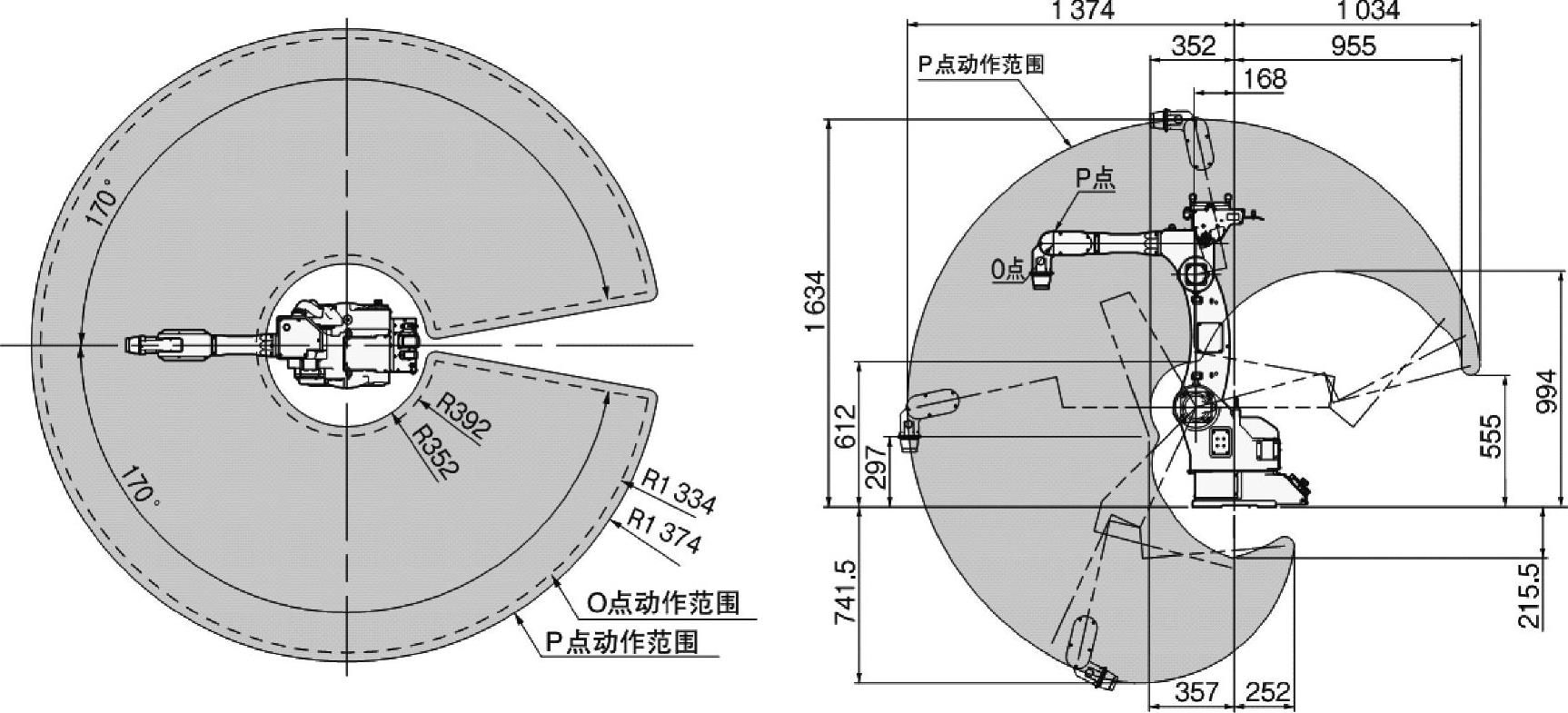
图4-103 TA1400机器人“O”和“P”点动作范围
2)动作范围显示的设定过程如下:
选择菜单项目栏中“View”(视图)的“Model Setting”(模型设置)子项目;或者右键双击右侧窗口任意位置,从弹出框的菜单中选择“Model Setting”(模型设置),然后,再从弹出的对话框中选中“Work Space”(工作范围),单击“OK”后又出现一个“ShowRo-bot Work Space”(显示机器人动作范围)对话框,选中这些复选框后,可显示机器人腕关节“O”点或“P”点的平面或球形动作范围,单击“OK”,如图4-104所示。
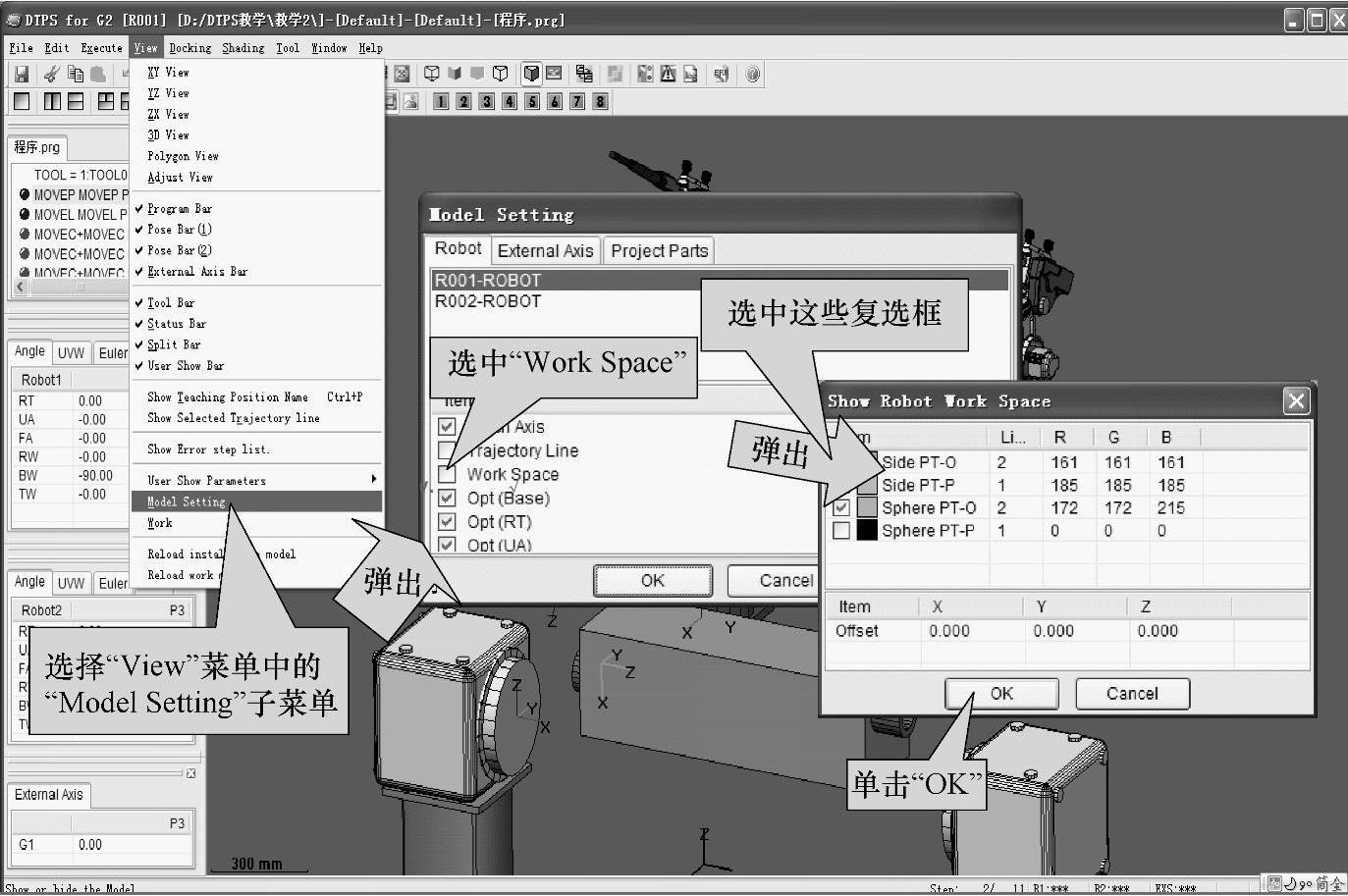
图4-104 在编辑程序窗口中设定机器人动作范围(https://www.xing528.com)
3)根据“Show Robot Work Space”(显示机器人动作范围)中复选框的选择,编辑画面相应显示出机器人腕关节“O”点或“P”点的动作范围,如图4-105所示。
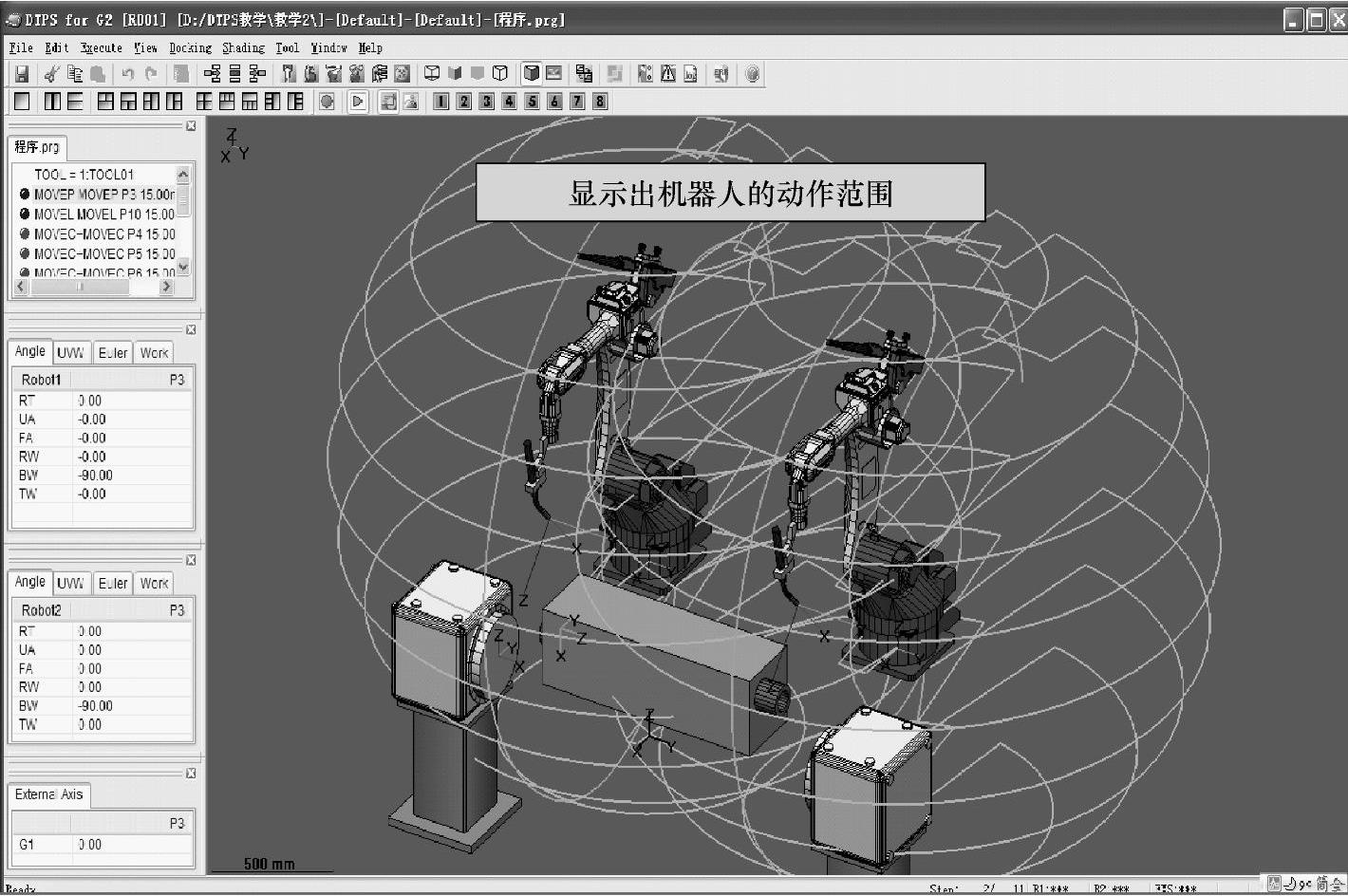
图4-105 显示出机器人的球形动作范围
4)在编辑机器人属性窗口中显示机器人动作范围。在菜单项目栏中选择“Robot”目录下的“Work Space”(工作范围)→“SidePT-O”子目录,即可显示出机器人腕关节“O”点的球形动作范围,如图4-106所示。
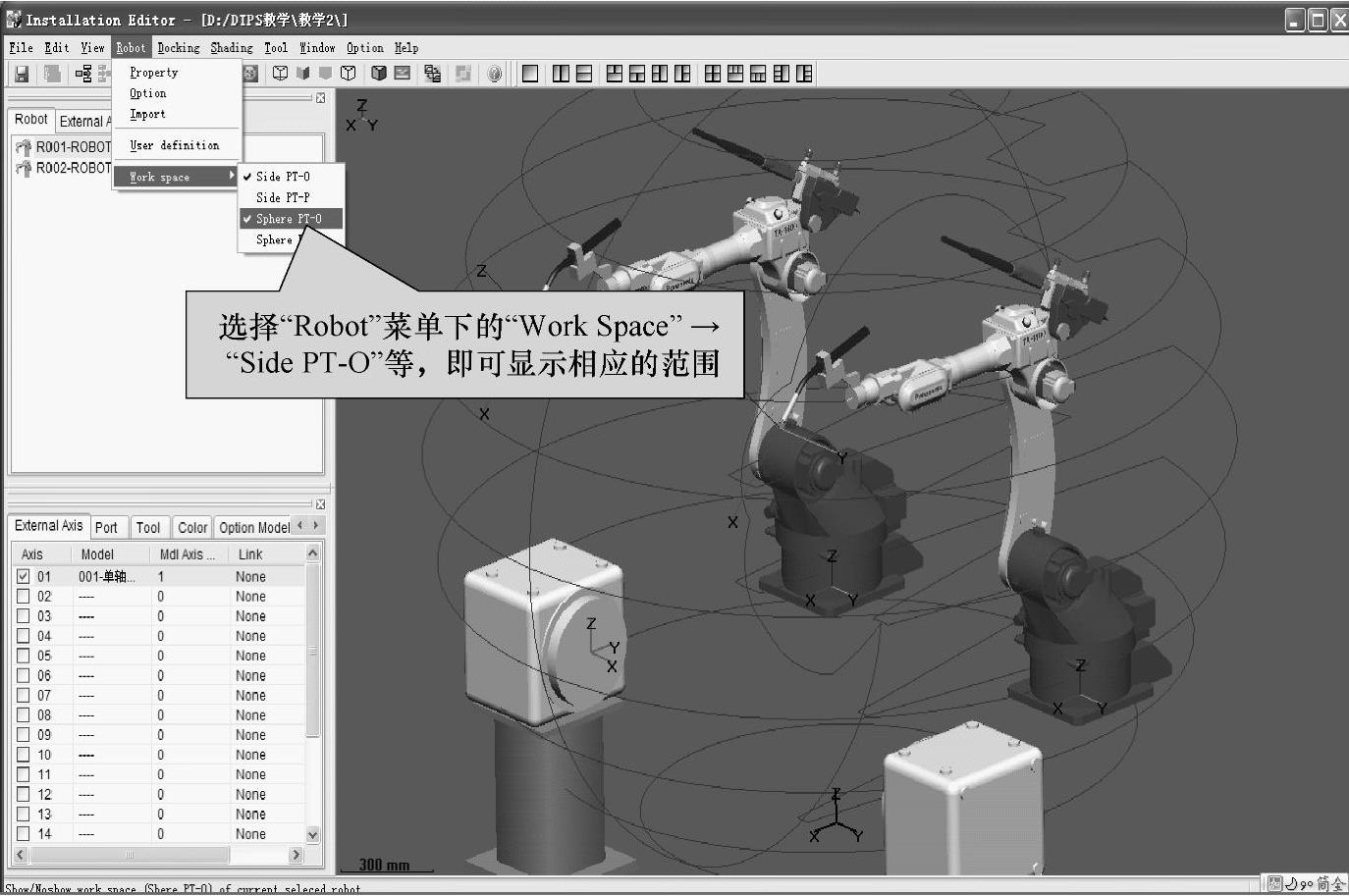
图4-106 编辑机器人属性窗口中显示机器人动作范围
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。