



(1)进入示教的操作界面 右键单击编程主窗口的任意位置,从菜单中选择“Add Pose with move command”(添加带移动指令的示教点),弹出对话框后,右键单击“Home”,选择“New”(或重命名“HOME”),确定起始点位置,如图4-80所示【参见配套光盘资料②-(9)编程示范之一】。
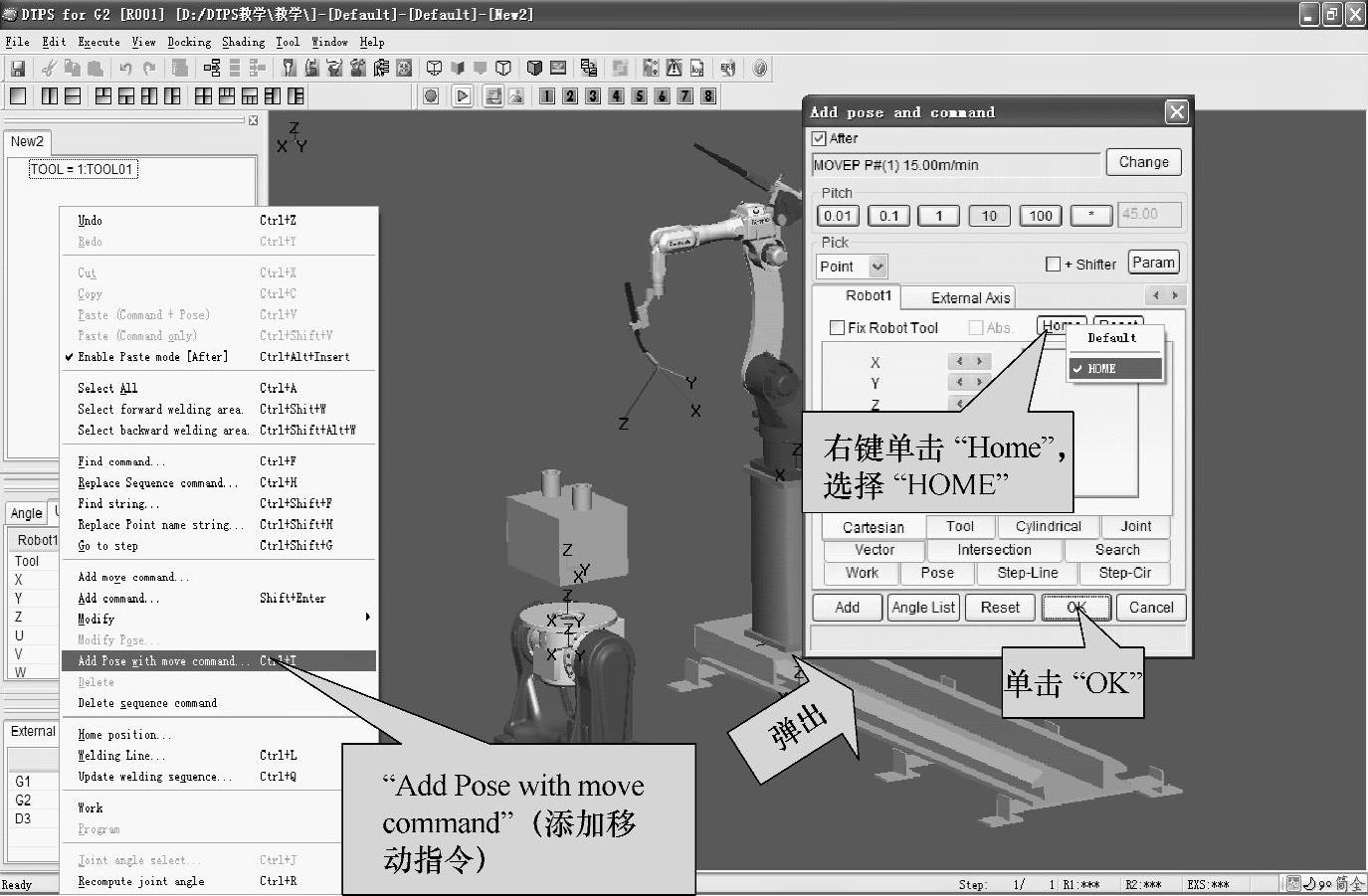
图4-80 进入机器人模拟示教的操作
(2)进入示教菜单 右键单击编程主窗口的任意位置,从菜单中选择“Add Pose with move command”(添加移动指令),如图4-81所示【参见配套光盘资料②-(10)编程示范之二】。
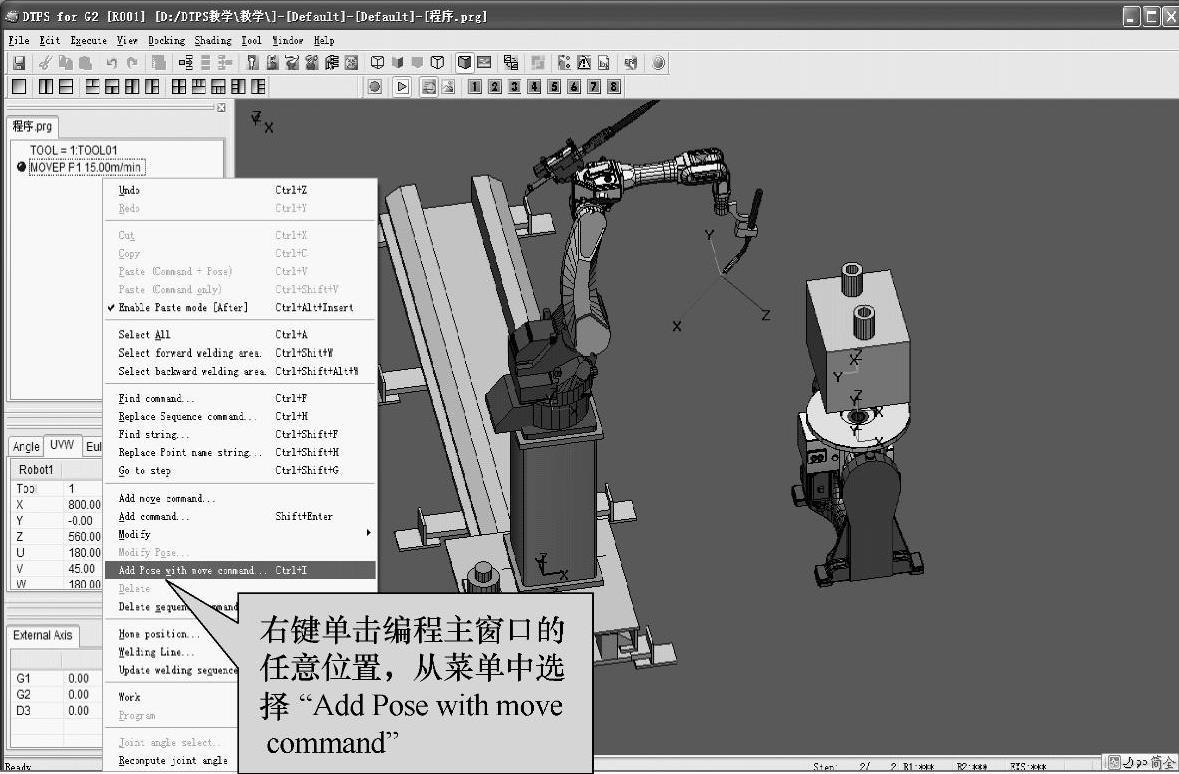
图4-81 进入示教菜单路径
(3)模拟示教界面项目栏的内容 其内容如图4-82所示。
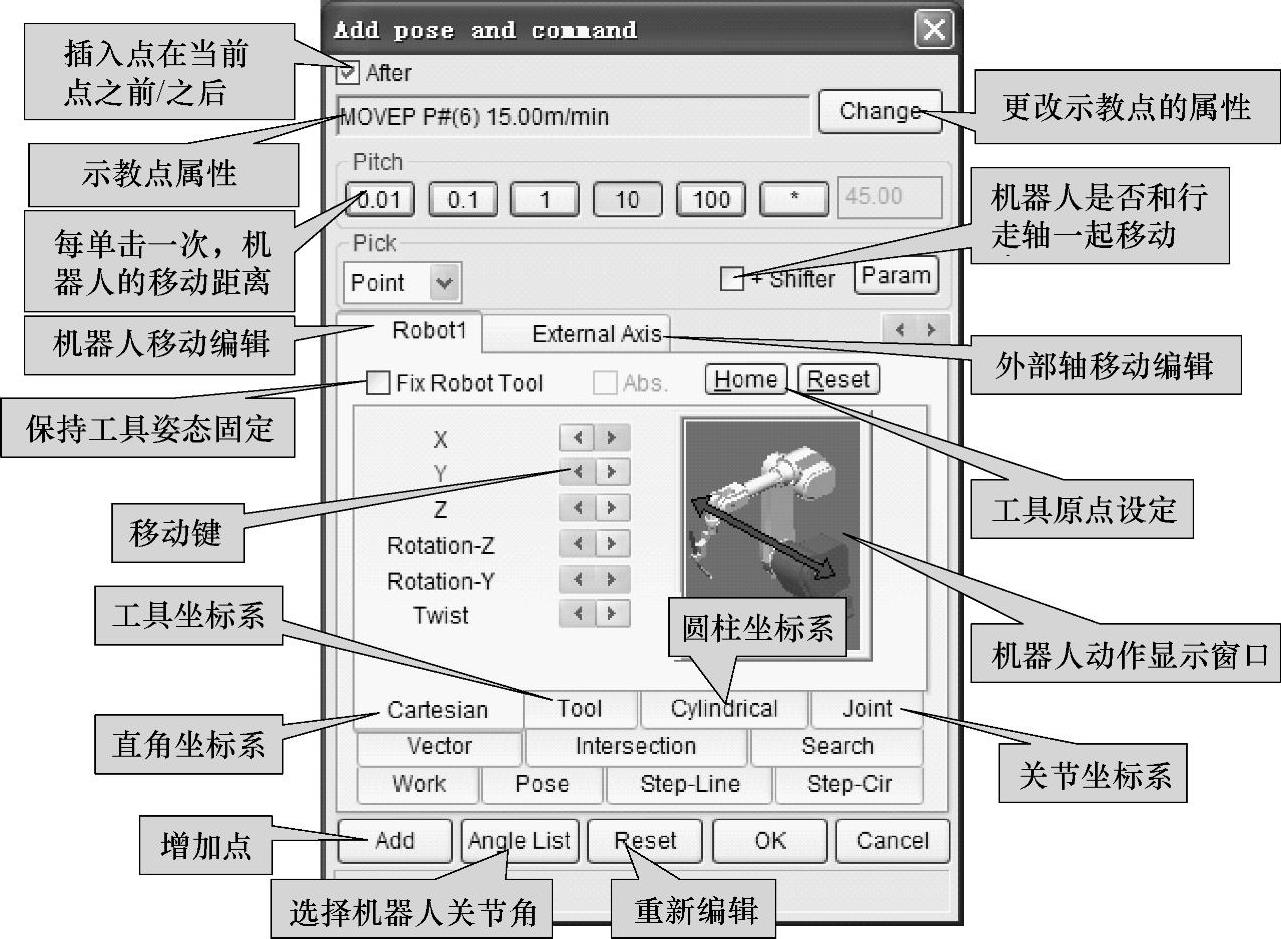
图4-82 模拟示教界面项目栏的内容
(4)编辑焊接示教点 单击“External Axis”(外部轴),拖动或点动G1轴的移动标尺,将G1轴转动45°,如图4-83所示。
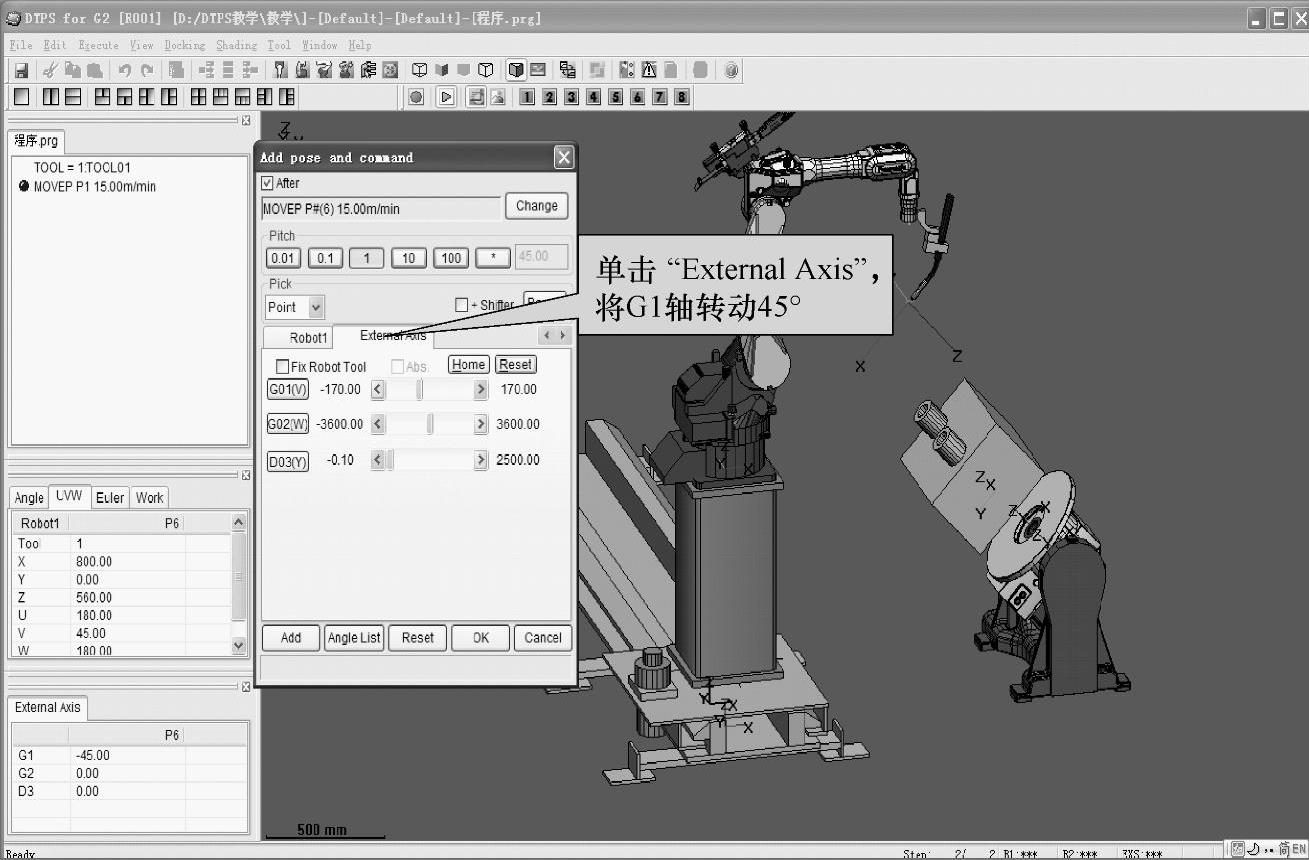
图4-83 编辑焊接示教点
(5)模拟机器人示教的操作(编辑焊接点) 单击“Robot1”,在弹出的对话框中单击“Change”(更改),选择插补方式(直线或圆弧)以及焊接点(或空走点),左手按住键盘“Ctrl”键,右手用鼠标左键单击第一点位置,焊枪会自动移至该点位置上,最后,单击“OK”确认,如图4-84所示。(https://www.xing528.com)
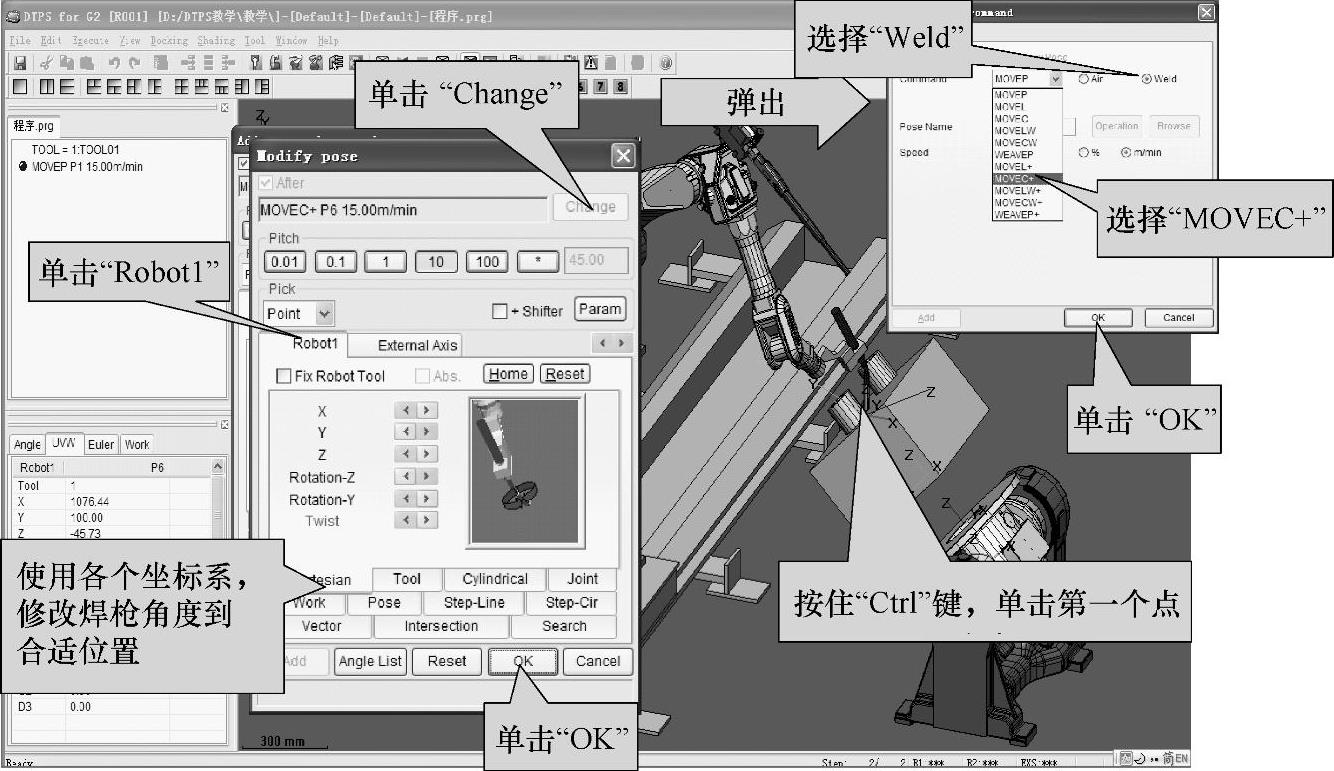
图4-84 模拟机器人示教的操作
(6)编辑接近点 选择工具坐标系,单击“Change”(修改),由于接近点是在焊接点的前一点,所以,这里不要选择“After”(之后),点动移动图标,使焊枪沿着X方向向后移动一小段距离,存储该点位作为接近点(该点的属性为:移动方式选择“MOVEL”直线、点的类型选择“Air”空走点),如图4-85所示。

图4-85 模拟机器人示教编程
(7)设定速度 批量编辑点的属性或选择若干个点,右键单击选定的点,单击“Modify”(修改)→“Action & Speed Modify”(修改动作及速度),选中“Speed”(速度),分别设定“ALL/WELD/AIR”(全部速度/焊接速度/空走速度),单击“OK”,如图4-86所示。

图4-86 设定机器人移动速度
程序编辑完毕,图例中设定:AIR(空走速度)为120m/min,WELD(焊接速度)为0.8m/min,单击保存并给程序命名,如图4-87所示。
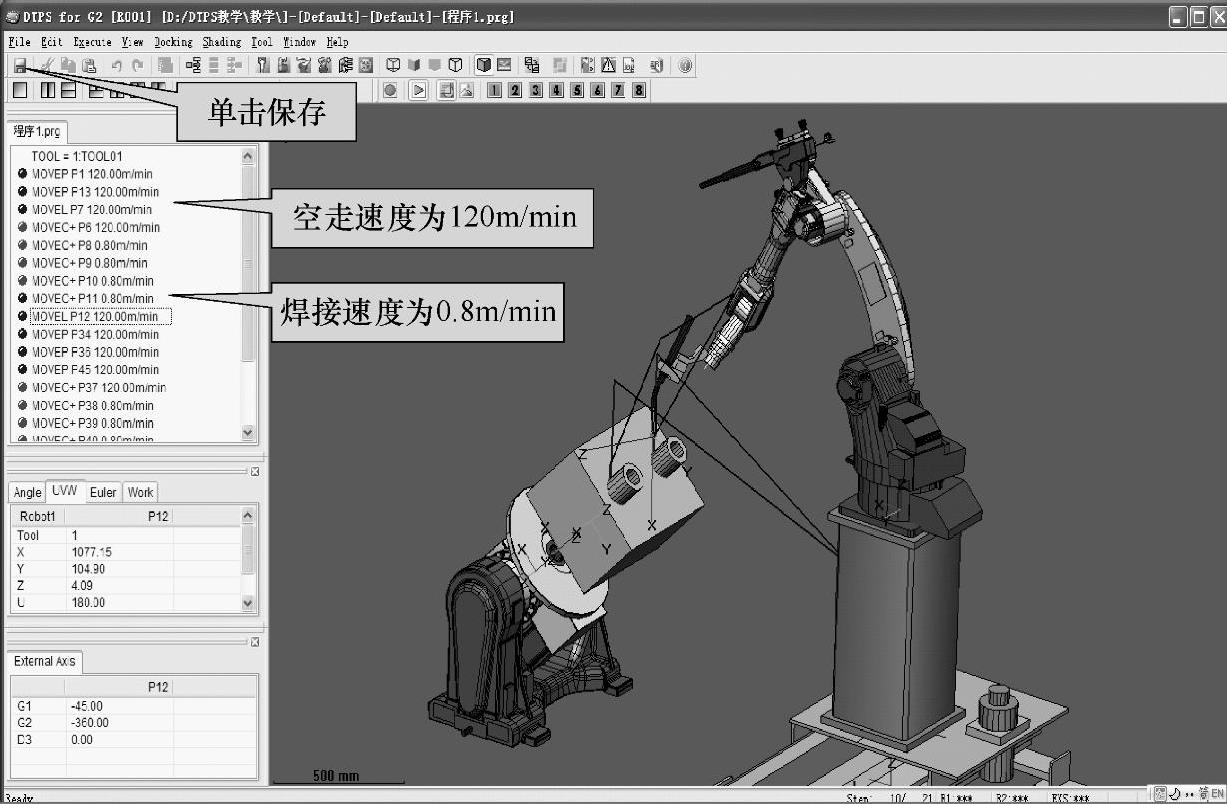
图4-87 机器人空走速度及焊接速度显示及保存
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。