



1.添加2轴回转变位机
进入编辑画面,如图4-46所示。

图4-46 设定机器人与变位机的关联
2.设定变位机的位置
1)可以通过设定在X方向的数值确定变位机的放置位置,例如设定变位机距离机器人1500mm,如图4-47所示。
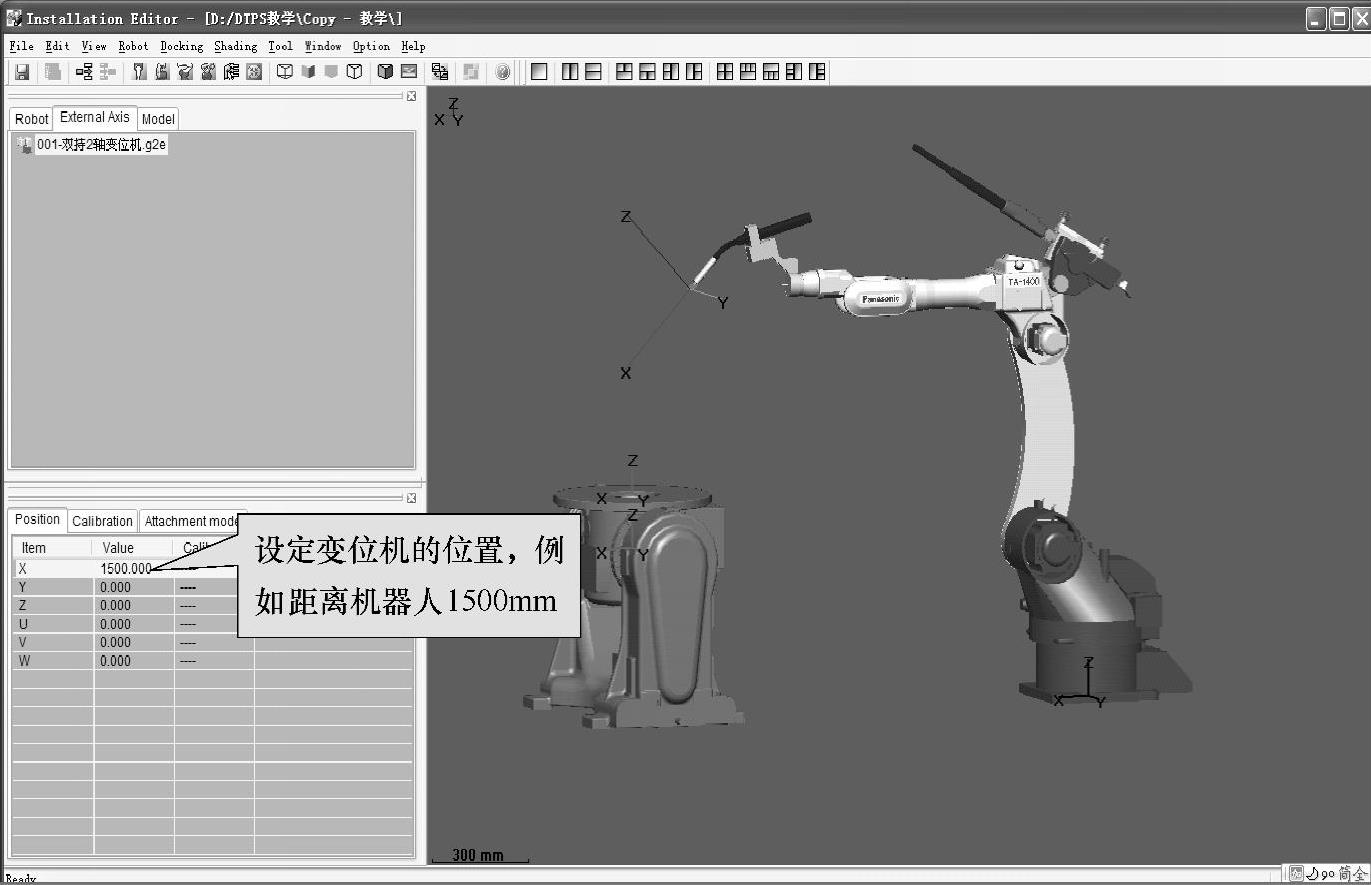
图4-47 设定机器人与变位机的相对位置
2)右键单击“External Axis”(外部轴)的空白处,选择“AddExternal Axis”(添加外部轴),在弹出的对话框里单击“Group”(群组),选择建立的行走变位机,如图4-48所示。
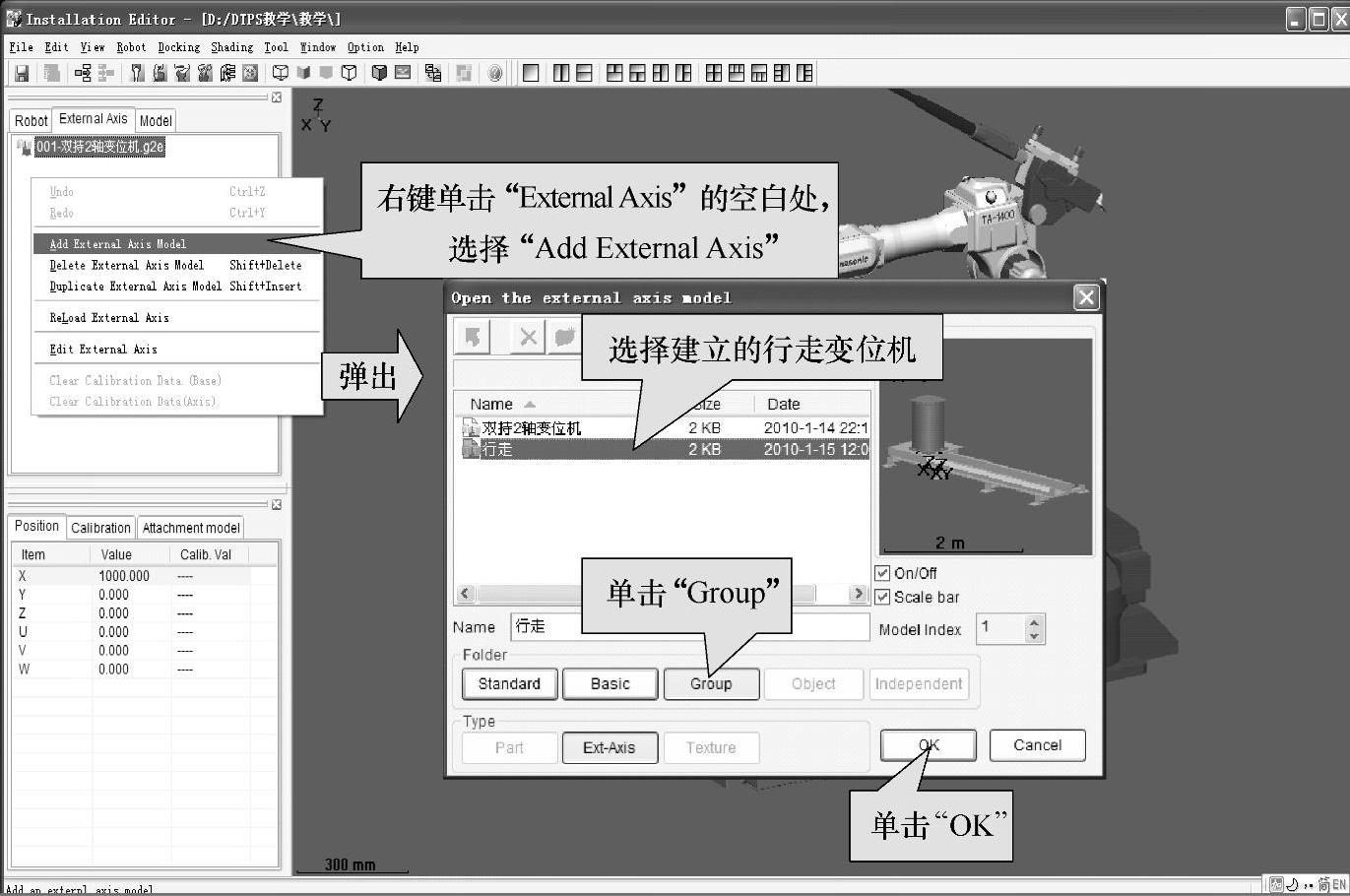
图4-48 进入添加设备界面单击“Group”
3.添加行走变位机
1)进入机器人行走机构编辑画面,如图4-49所示。
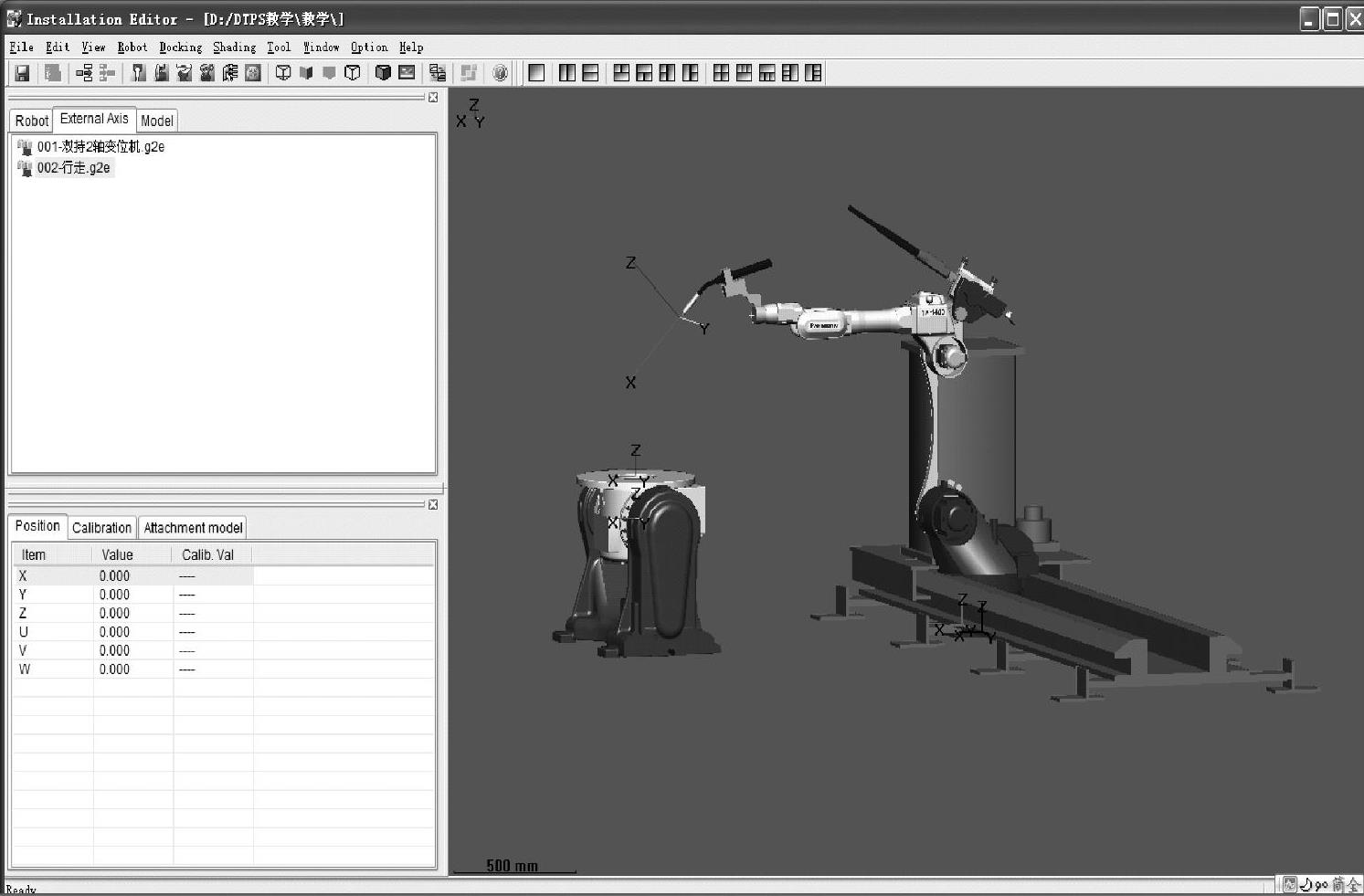
图4-49 添加行走变位机
2)选择“Robot”(机器人)标签,单击“External Axis”(外部轴)标签,按住键盘“Ctrl”键,单击各个轴,设定G1、G2、G3三个外部轴,G1和G2轴为回转轴,G3为行走轴。双击“Link”(链接)后,选择“Robot”,建立机器人和行走轴的关联,将机器人放到行走轴上,如图4-50所示。
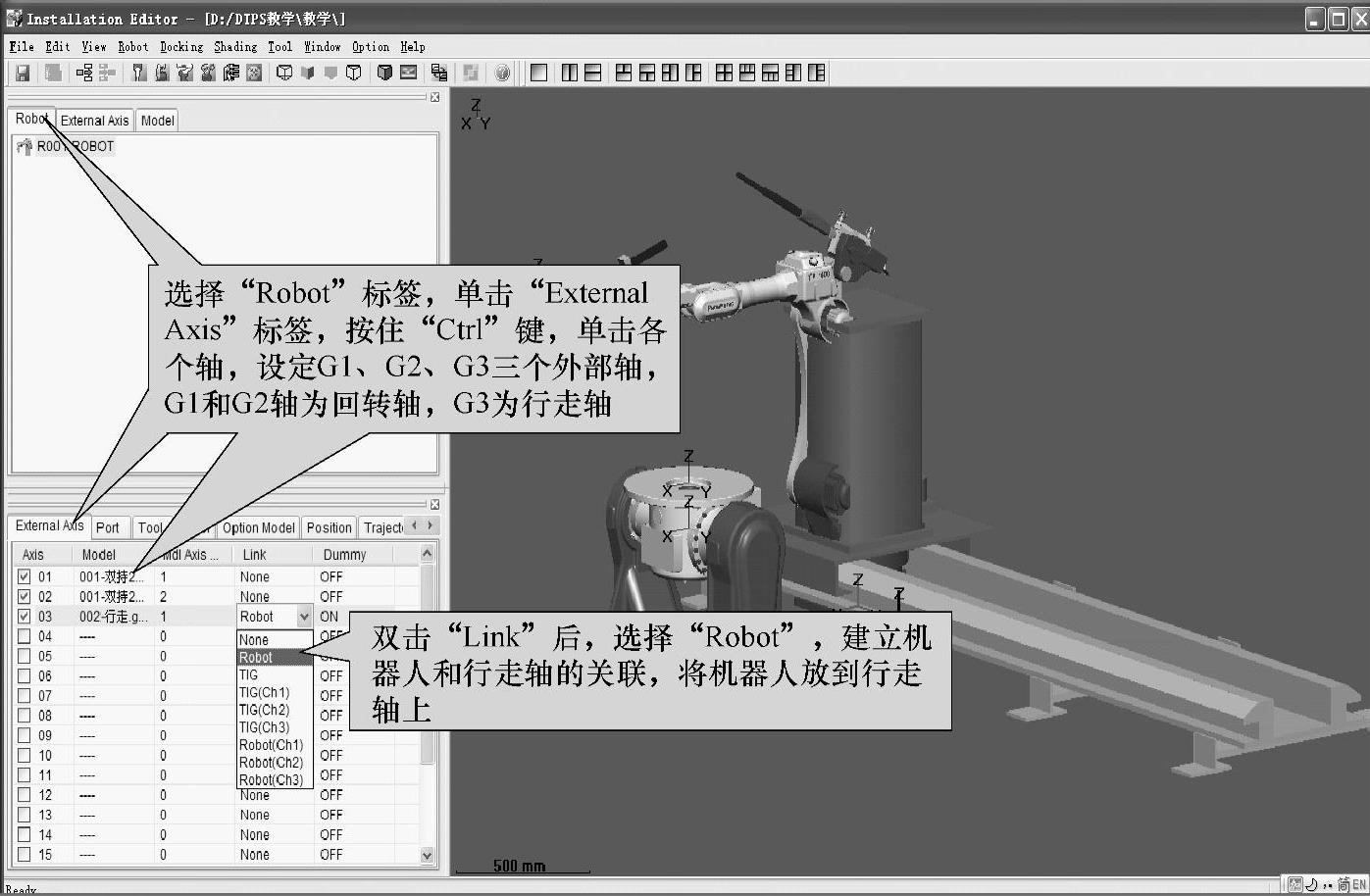
图4-50 建立系统间的关联
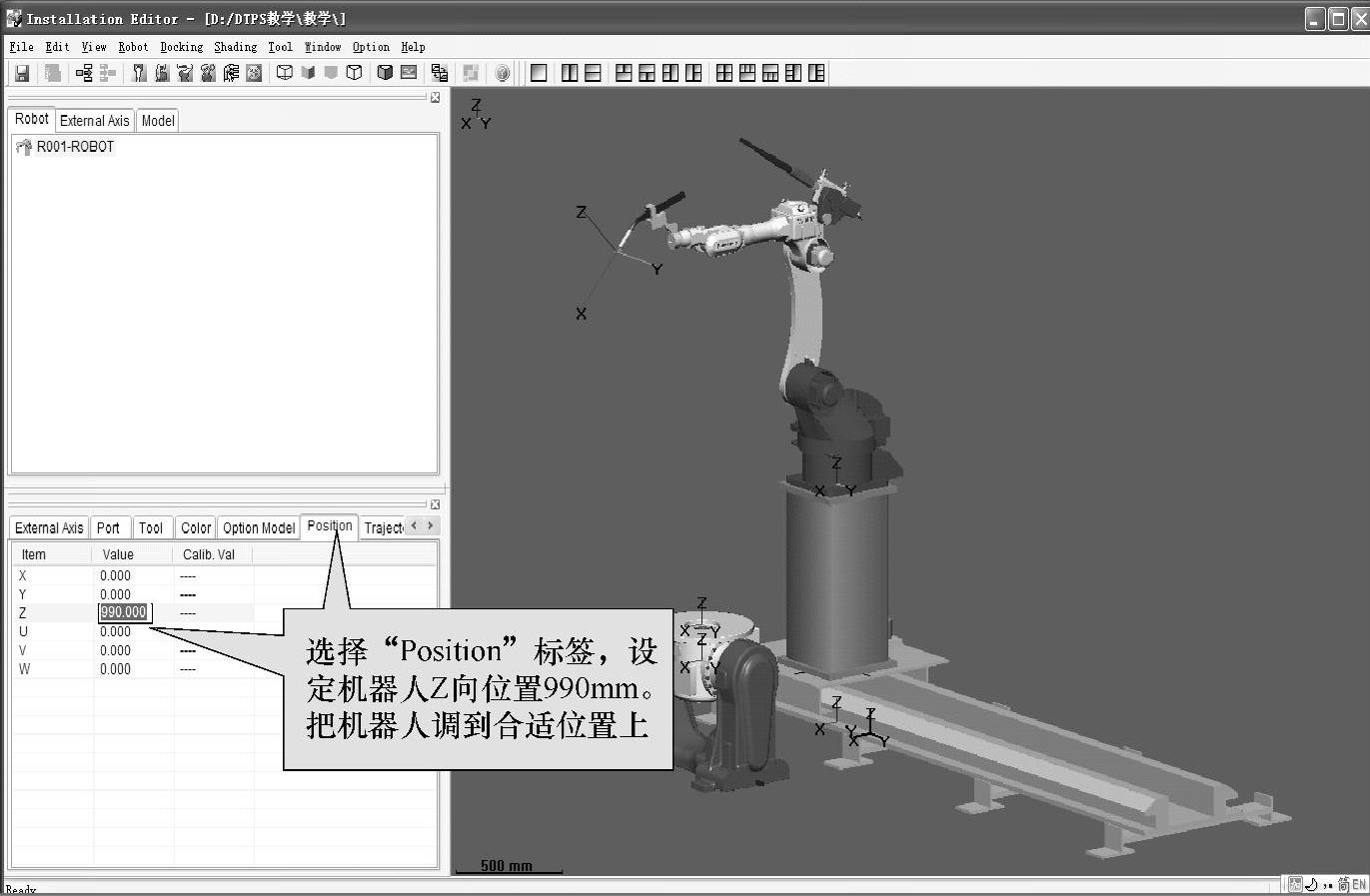
3)选择“Position”(位置)标签,设定机器人Z向位置990mm,把机器人调到合适位置上,如图4-51所示。
 (https://www.xing528.com)
(https://www.xing528.com)
图4-51 将机器人放置到底座的位置
4)双击“R001-ROBOT”,在弹出的对话框中选择“External Axis”(外部轴)标签,设定G1、G2轴为回转轴。“Type”(类型)选择“Rotation/Tilt”(旋转/倾斜),如图4-52所示。
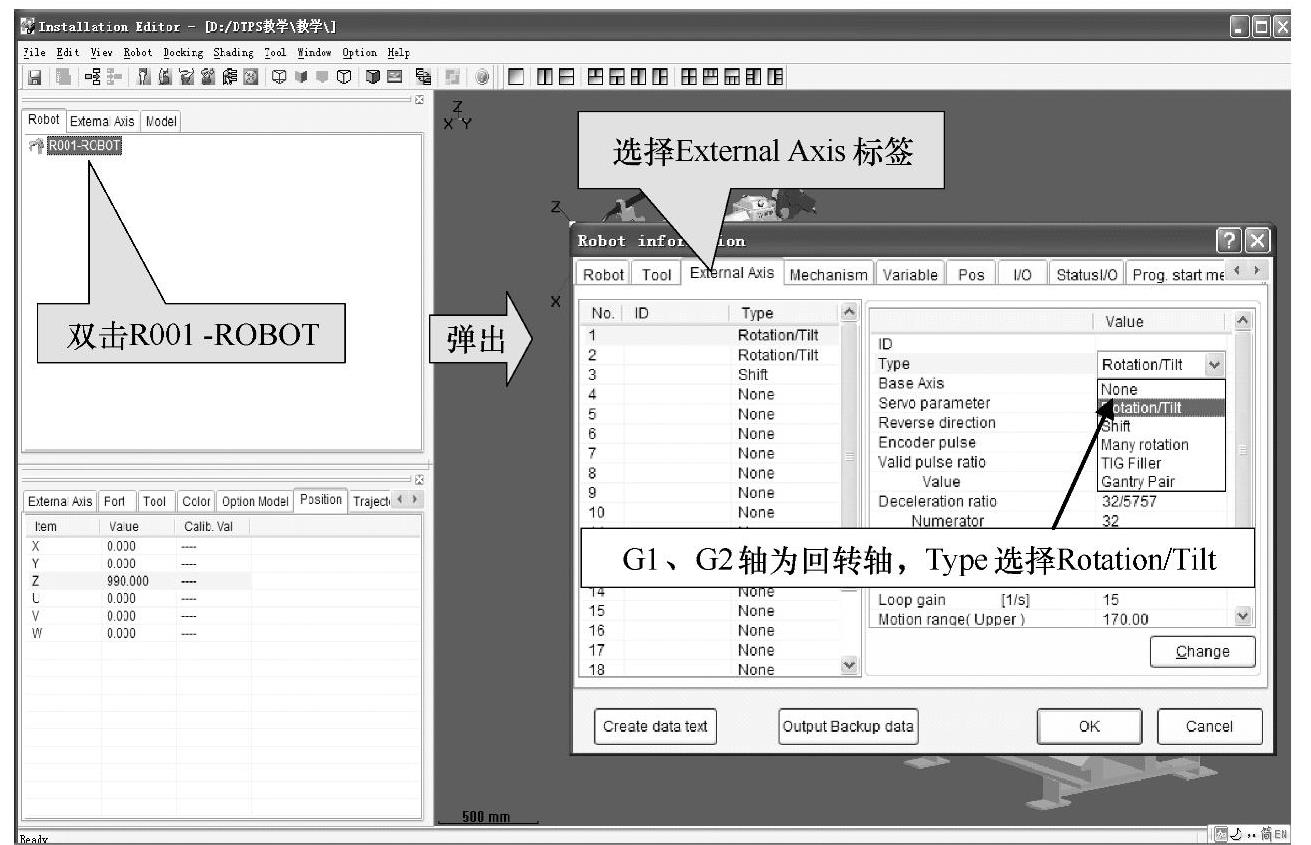
图4-52 定义外部轴的类型
4.设定外部轴参数
外部轴参数的内容包括:轴的类型(回转/行走);该轴的基轴是哪个轴?(图例中G2轴的基轴是G1轴);伺服电动机的功率电动机是否反转?编码器的脉冲数;减速比及其分子、分母;最大速度;最大加速度;正方向最大转动角度;反方向最大转动角度;环路增益,设定好所有参数后,单击“OK”,如图4-53所示。
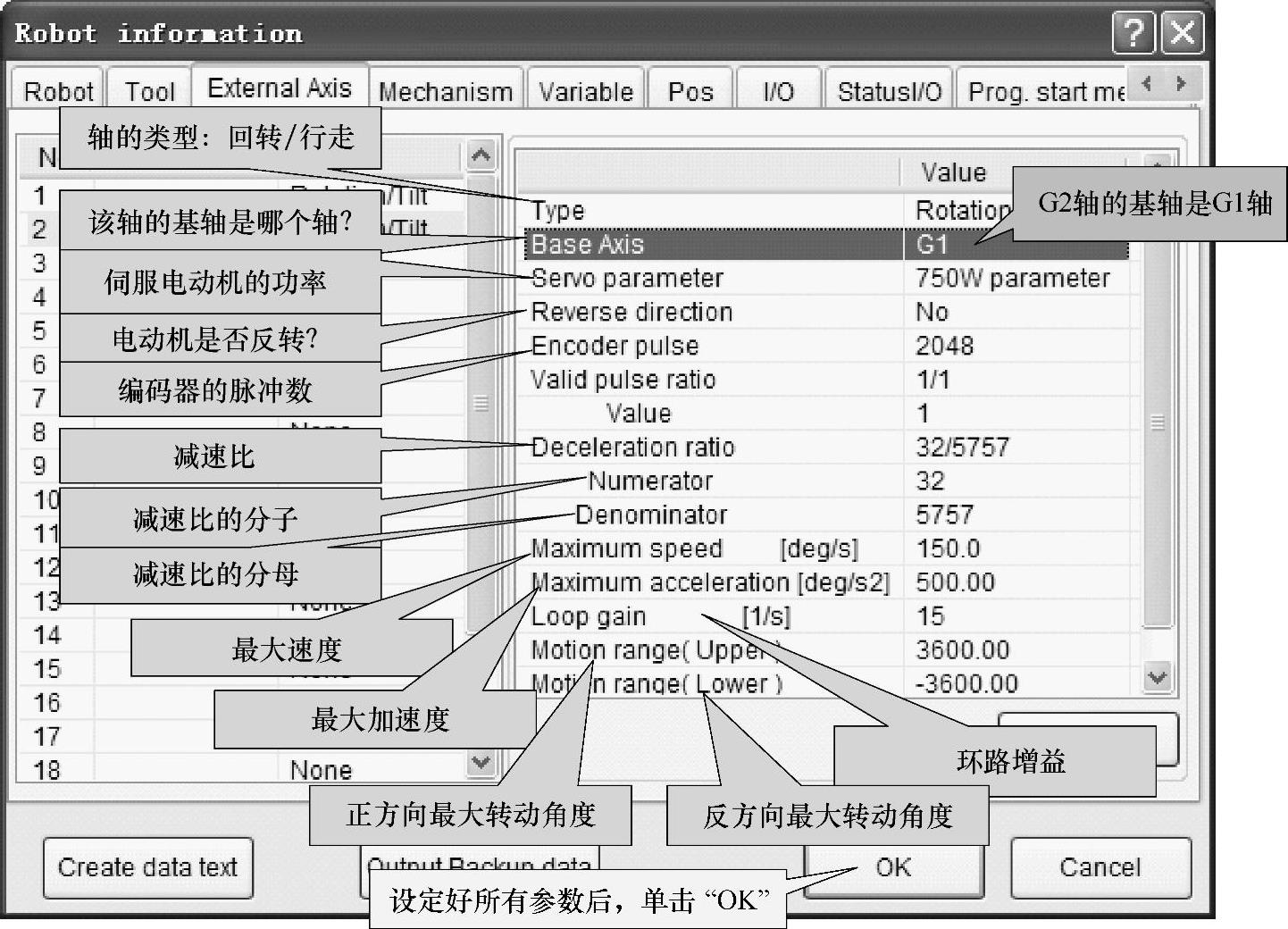
图4-53 设定外部轴参数
5.设定机构
选择“Mechanism”(机械装置)标签双击“Value”(值),在弹出的对话框中选中“Use”(应用),单击“OK”,如图4-54所示。
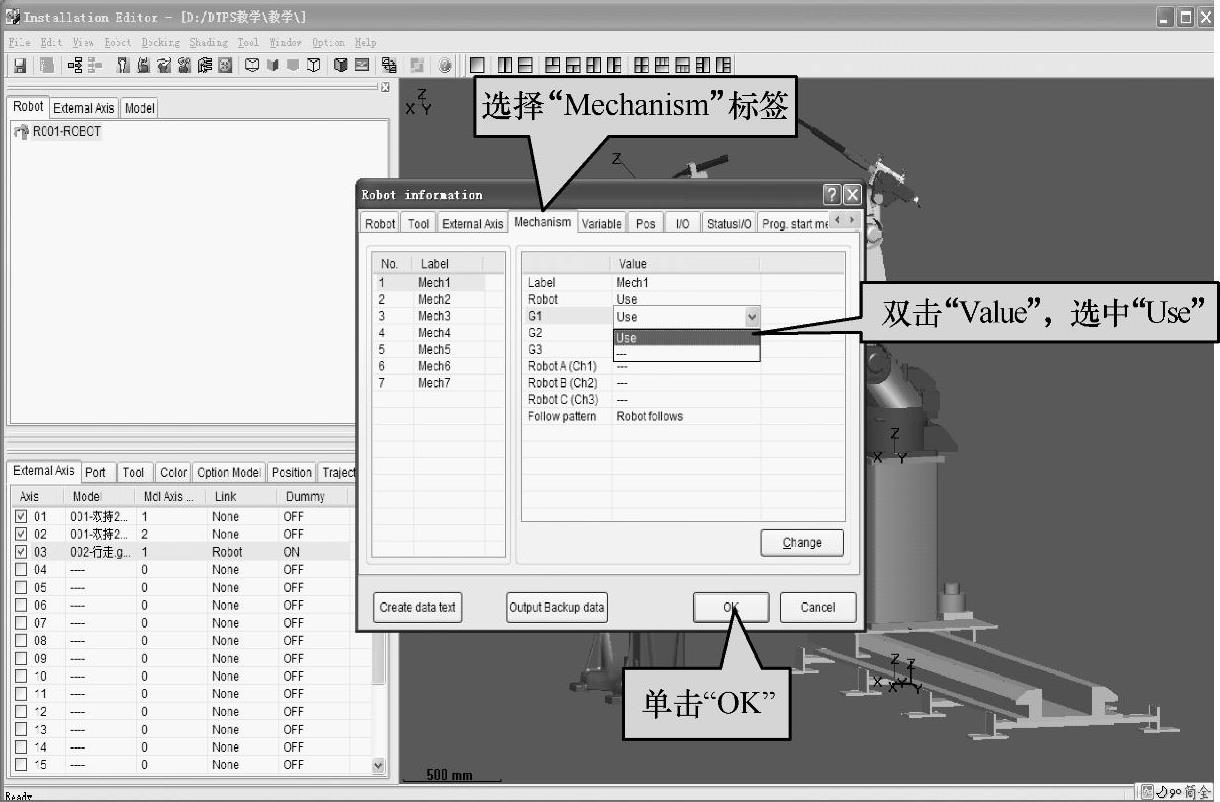
图4-54 设定外部轴的使用状态
6.设定机器人与外部轴的协调
1)单击“Robot”(机器人)菜单下的“Option”(选项),弹出对话框,勾选“Exter-nalAxis”,单击“OK”,如图4-55所示。
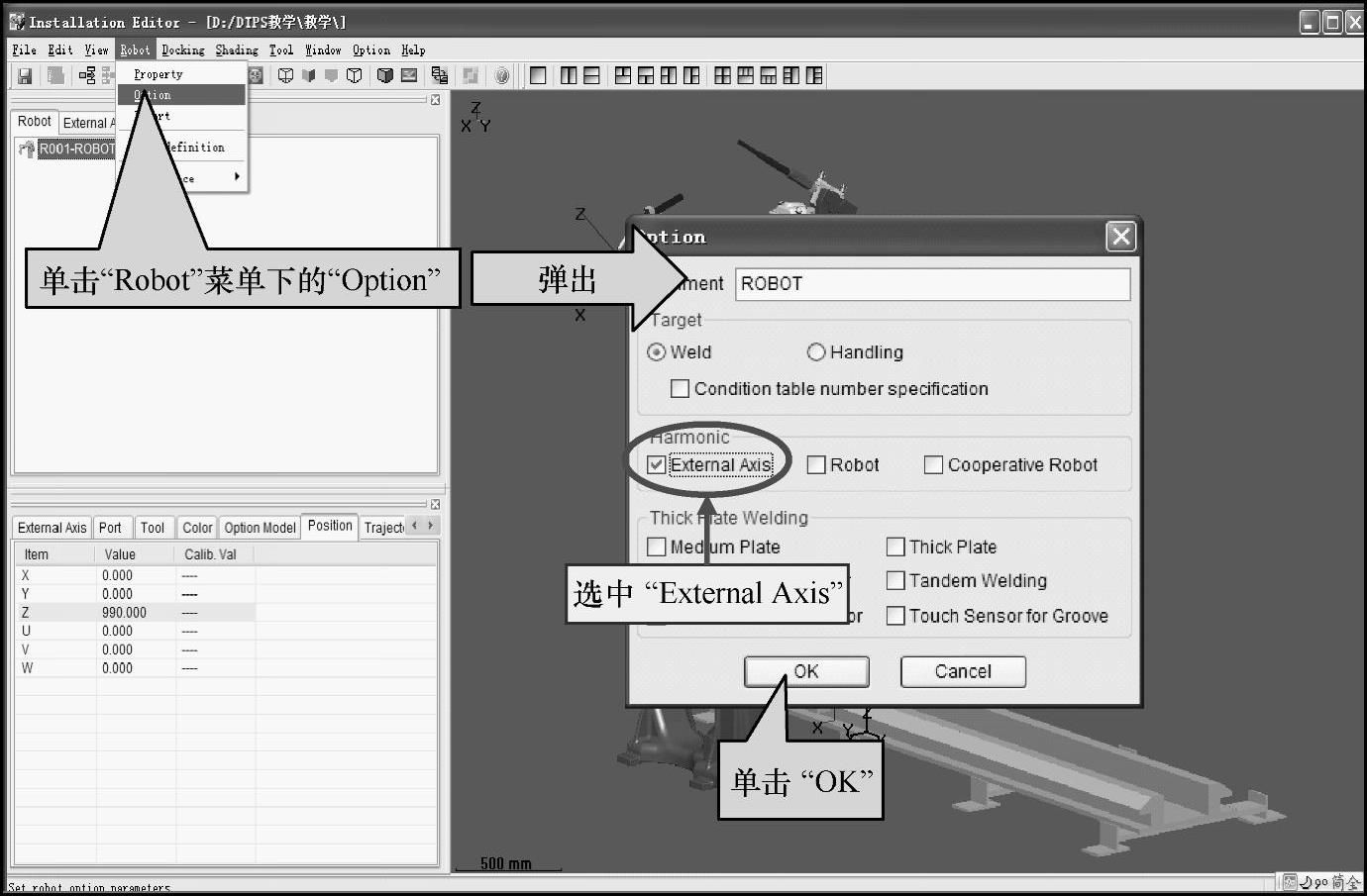
图4-55 设定机器人与外部轴的协调关系
2)外部轴设定完毕后,单击保存图标,如图4-56所示。
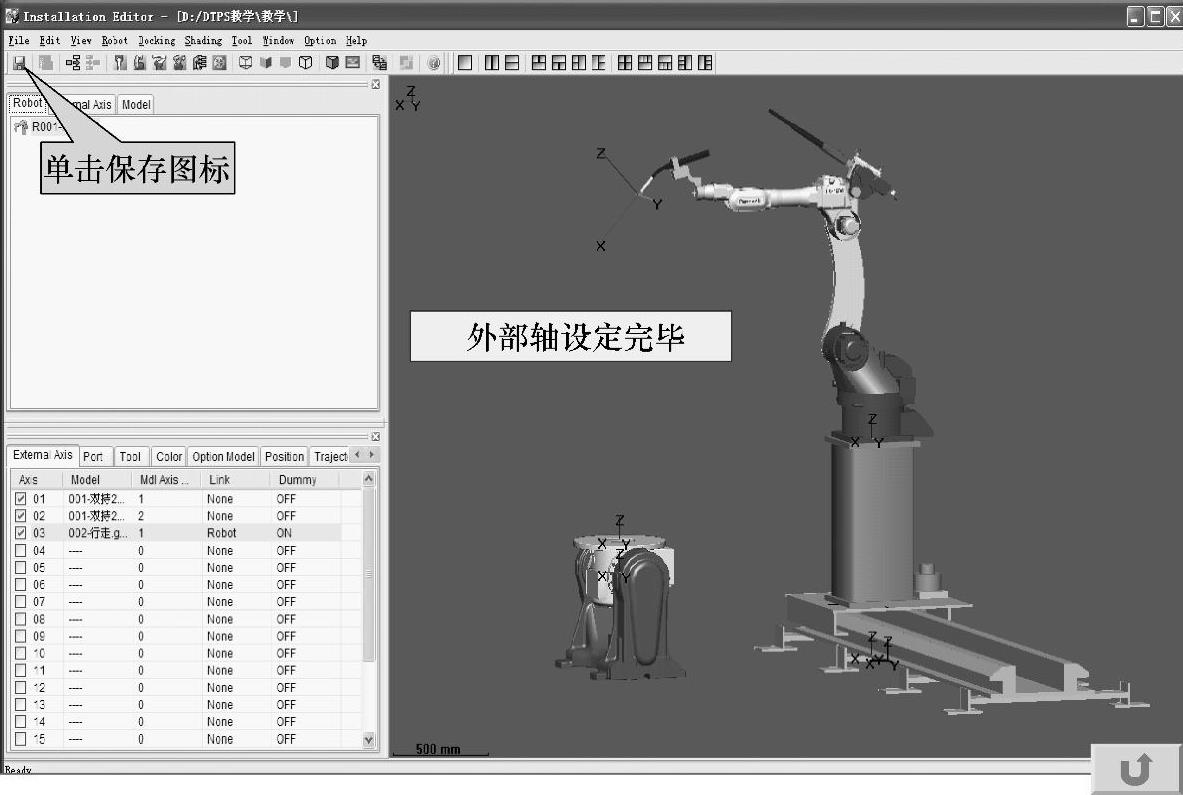
图4-56 保存设定好的数据
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。