



(1)外部轴添加 设定机器人外部轴处于“Use”(即使用状态,具体内容详见4.3.4节),如图4-17所示。
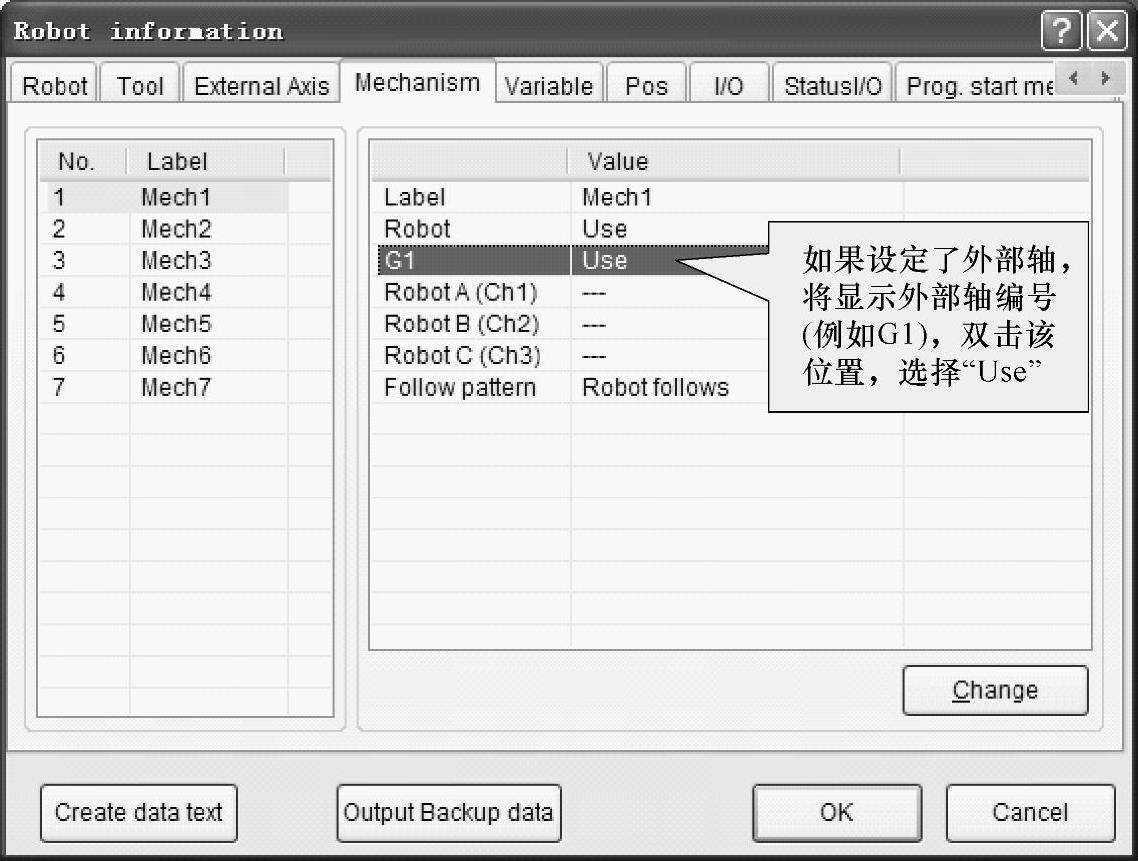
图4-17 机器人系统机构(外部轴)的设定
(2)工具模型(焊枪)的添加
1)选择“Tool”工具标签,双击“File”,弹出“Open the tool model”(打开工具模型)对话框,从“Standard”部品库中选择焊枪(例如“Torch 350A standard”),如图4-18所示。
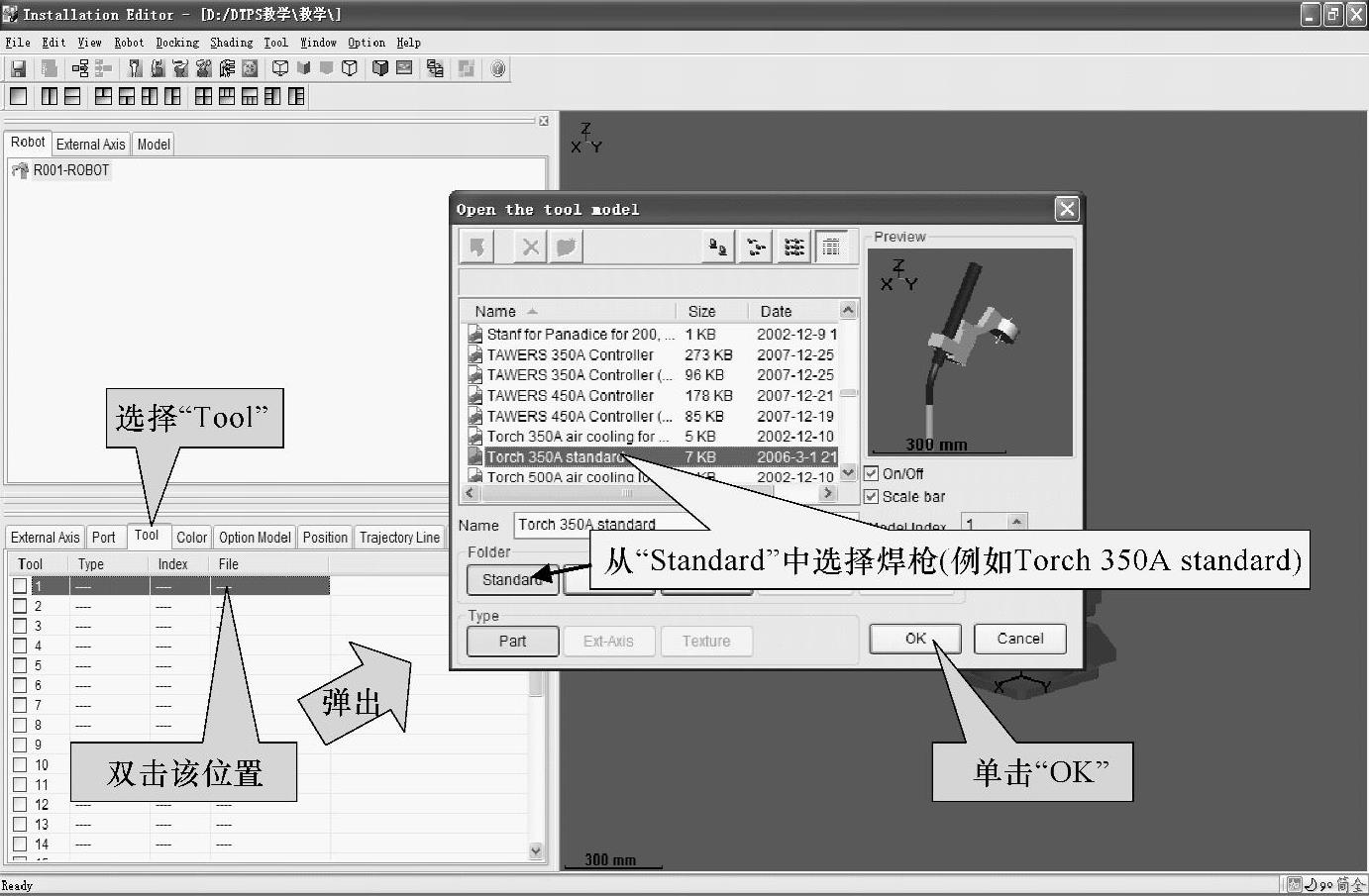
图4-18 工具模型(焊枪)的添加界面
2)单击“OK”后,“File”处显示“Torch 350A standard”,焊枪模型已改变为所选型号,如图4-19所示。
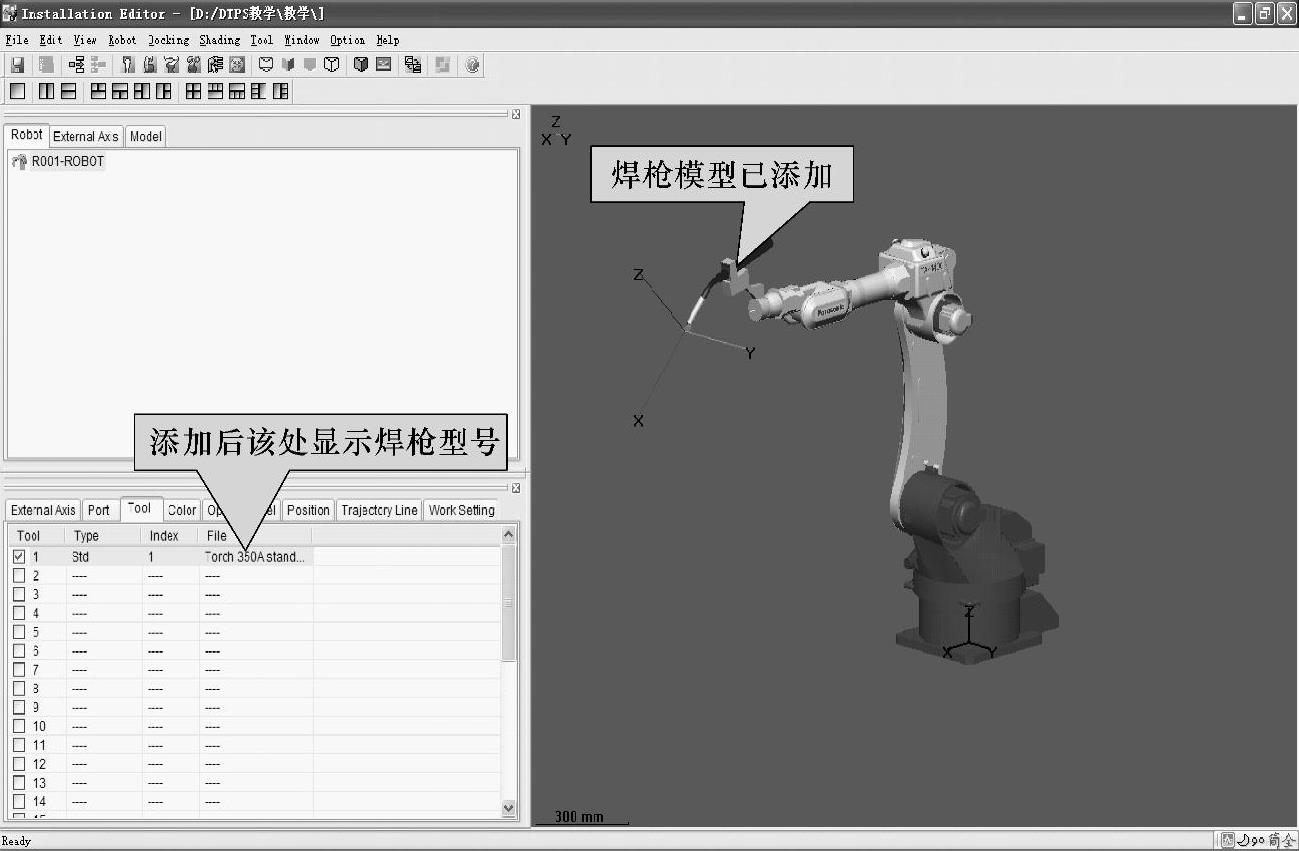
图4-19 工具模型(焊枪)的添加
(3)送丝机构的添加(https://www.xing528.com)
1)在“Robot”编辑菜单下,选择“Option Model”(模型选项)标签,由于送丝机安装在FA轴,鼠标双击该行,在弹出的对话框中,选择“Standard”部品库中某种型号的送丝机,如图4-20所示。
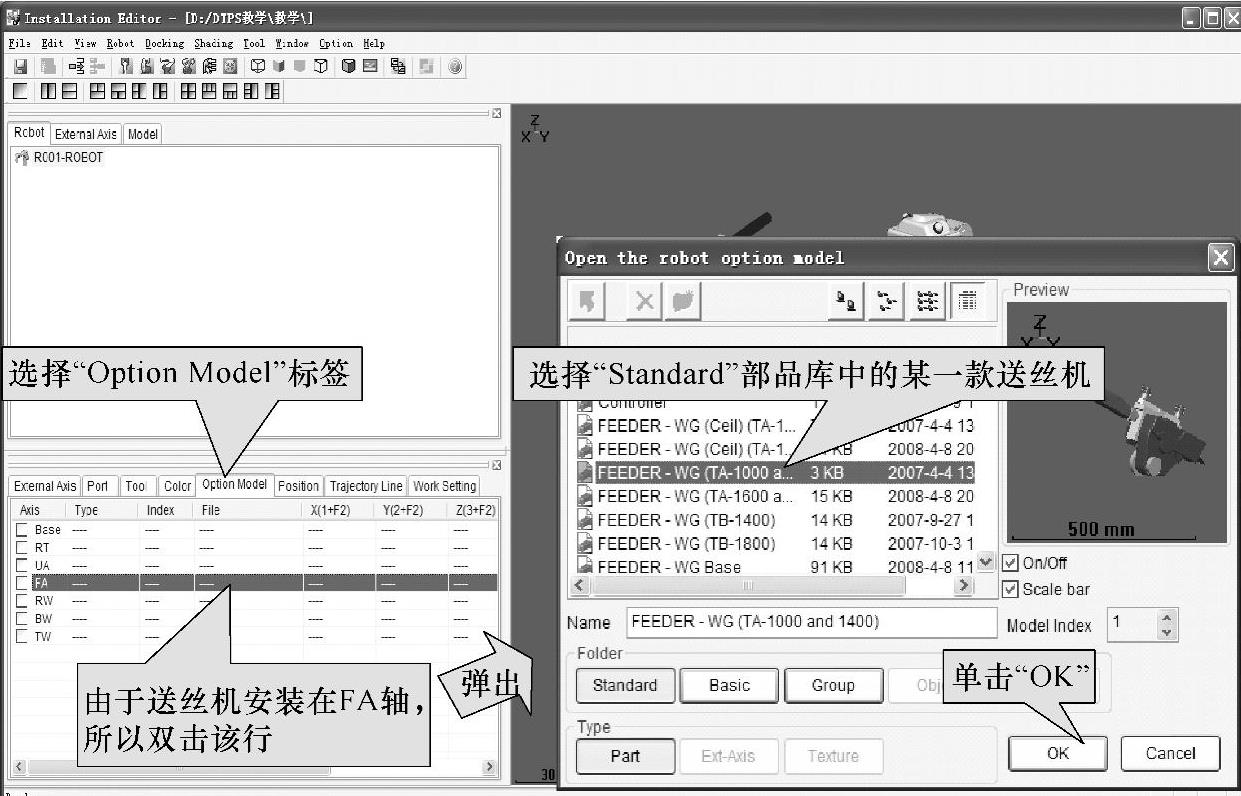
图4-20 送丝机构的添加界面
2)单击“OK”后,机器人的FA轴处出现送丝机模型,“Option Model”(模型选项)标签也显示“FEEDER-WG(TA-1000 and 1400)”,如图4-21所示。
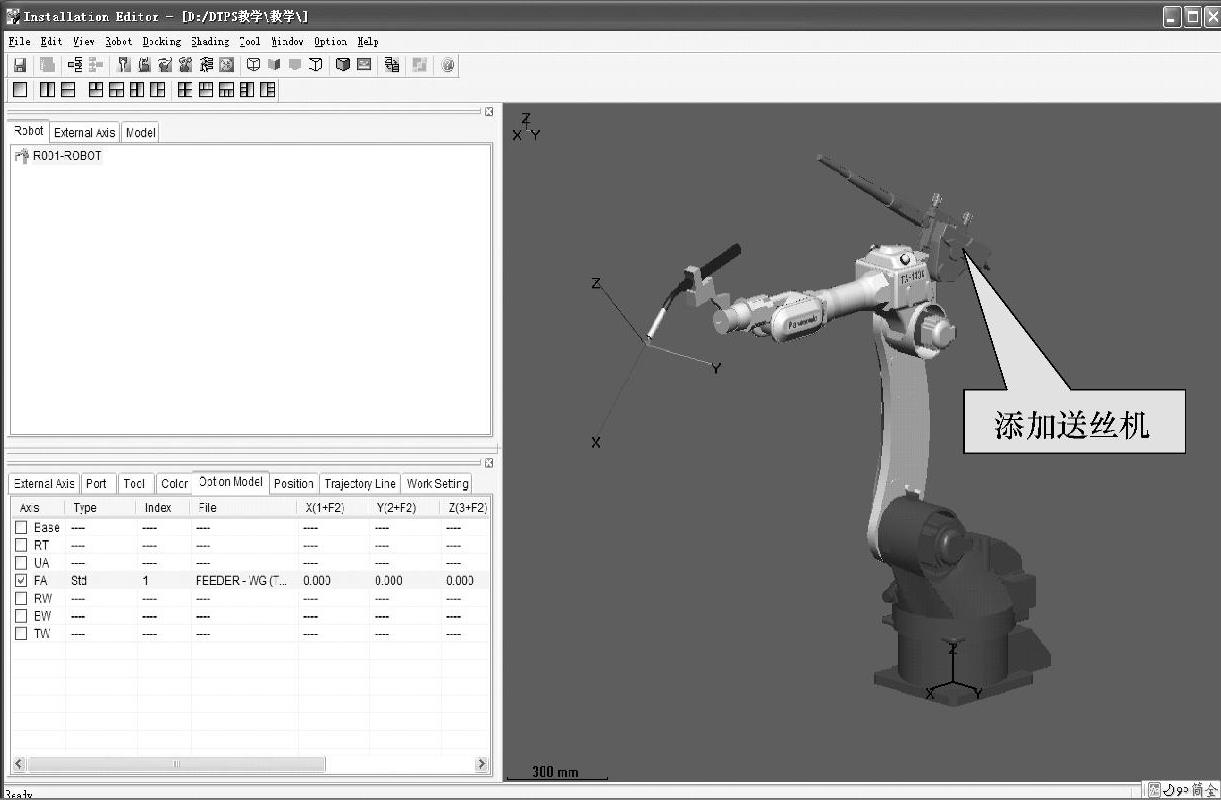
图4-21 送丝机构(送丝机)的添加
(4)其他标签的说明 选择机构中的“External Axis”(外部轴)、选择机器人间通信端口“Port”、设定设备颜色“Color”、设定机器人位置“Position”、设定机器人运行轨迹的属性“Trajectory Line”(轨迹线)、设定工件的位置“Work Setting”(工件设置),当所有设定完成之后,单击保存图标,保存设定内容,如图4-22所示。
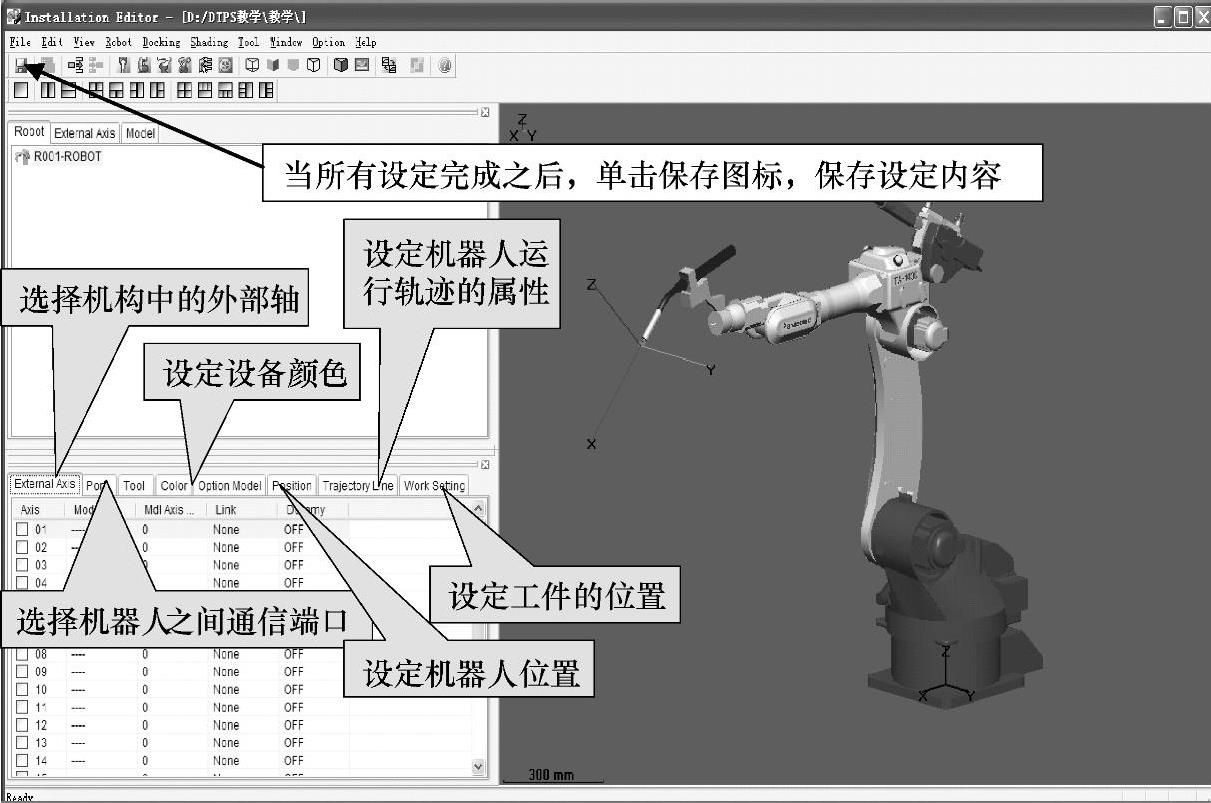
图4-22 其他设定内容及保存
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。