



近年来,机器人离线编程技术发展迅速,逐渐向自动编程方向发展,出现了任务级离线编程(Task Leve lOLP)概念,它采用更高级的指令系统,用户只需要输入简单的命令,即可完成编程工作,例如:用户发出“焊接零件A”的指令,系统便会自动生成零件A上的焊缝轨迹,根据零件的材料及结构形式,自动给出焊接工艺参数等,并自动转换成机器人控制程序。
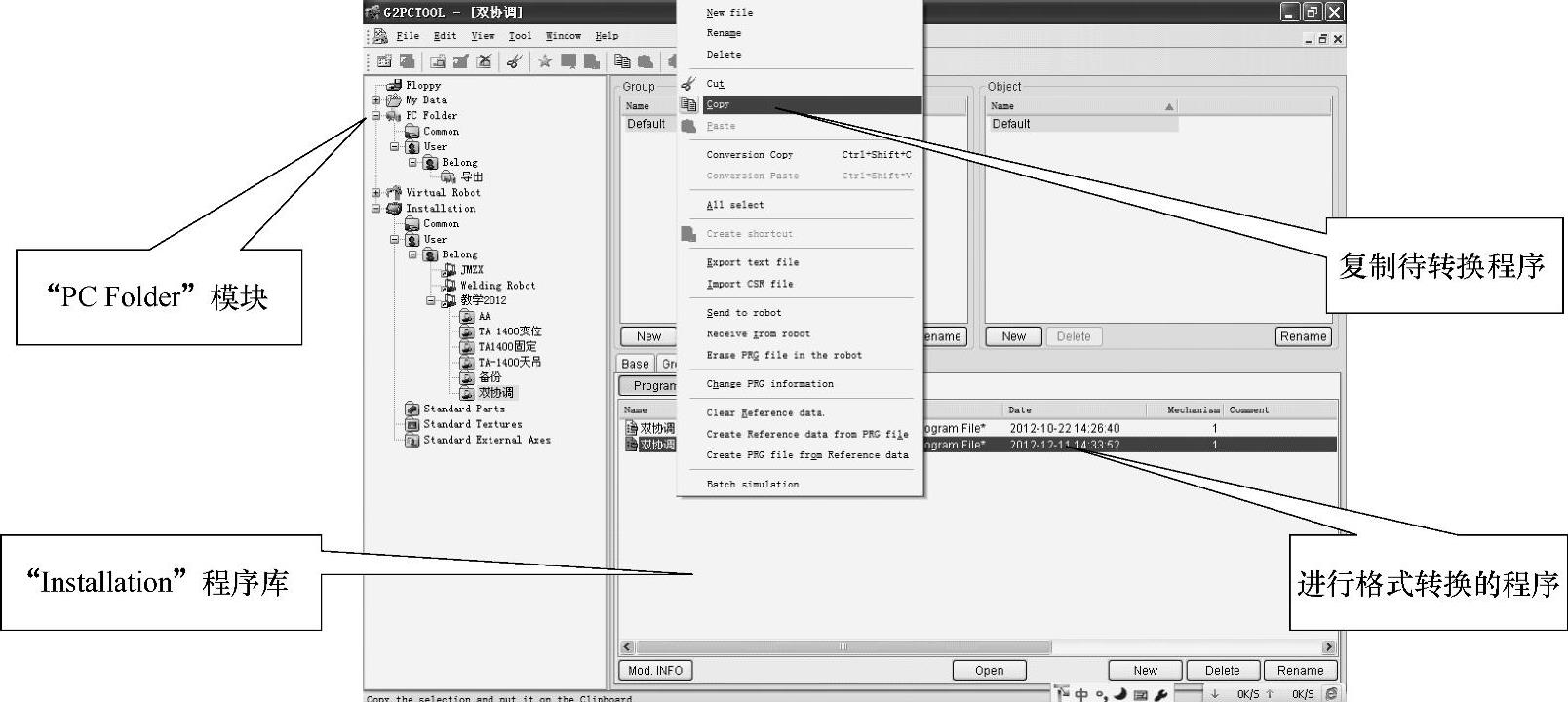
图2-23 程序转换器界面
与执行级离线编程相比,任务级离线编程要用更抽象的编程命令编程。为了使抽象的任务级编程命令能够解释成具体的执行级编程命令,不但需要被焊工件的各种信息,而且需要根据这些信息规划合适的焊接工艺参数和机器人运动路径。因此,机器人焊接任务级离线编程需要如下支撑技术:①焊接工件特征建模技术;②焊接参数规划技术;③焊接机器人路径规划技术。
1.任务级焊接工件特征建模技术
对于任务级的离线编程系统,不仅要得到工件几何模型,还要得到工件的加工信息(如焊缝位姿、板厚、材料和坡口等)。通过实体模型只能得到工件的几何要素,不能得到上述加工信息,而从实体几何信息中往往不能正确或根本无法提取上述加工信息,因此,无法实现任务级离线编程对焊接工艺和焊接机器人路径的推理和求解。这同其他CAD/CAM系统面临的问题是一样的,因此,必须进行焊接工件的特征建模。
特征是用来生成设计、分析设计或评价设计的元素。由于在焊接机器人离线编程系统中,焊接工件的特征模型需要为后续的焊接参数规划、机器人路径规划模块提供充分的设计数据和加工信息,所以特征是否全面准确地得到定义与划分,就成了直接影响后继程序使用的一个重要问题。焊接工件的特征建模内容如下:
1)焊接工件特征的分类和组织:①焊接工件特征;②板特征材料;③形状。
2)接头特征形式:焊缝。`
3)坡口特征形状:尺寸。
4)板特征包括:形状、材料、尺寸等和板相关的特征。
5)接头特征包括:形式特征、焊缝特征和装配特征等。
6)焊缝特征包括:焊缝的形状(圆弧或直线)、关键焊缝点的位置姿态及其他信息(如和其他特征之间的关系等等)。
7)装配特征是指:记录焊板之间相对位置和拓扑关系的一组特征(如板号、板之间的面和边,对应的关键点等)。
8)坡口特征是指:坡口形状、尺寸等信息。焊接工件的特征建模工具如图2-24所示。
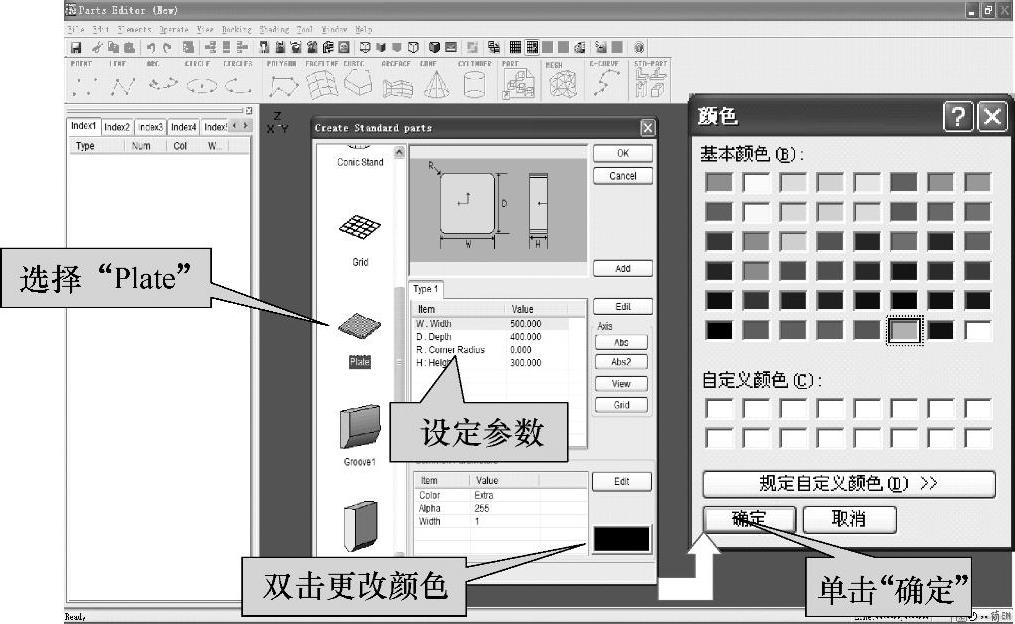
图2-24 焊接工件的特征建模工具
2.焊接工件数据模型
在实际焊接结构中,焊接结构件由焊接接头以一定顺序相连接,并且由于不同形式的焊接接头(如对接、角接等)都有其固定的分类和描述位置形状的参数,这使得焊接与装配有相似之处。因此,焊接工件特征建模可以看做是一种装配,例如钢板的焊接,板相当于零件,而接头相当于装配关系。
这里假定一个接头由两个板相连,而一个板上则可以连接多个接头。依据这种原理建立焊接工件的数据模型,如图2-25所示。
3.特征建模系统
特征建模系统如图2-26所示。
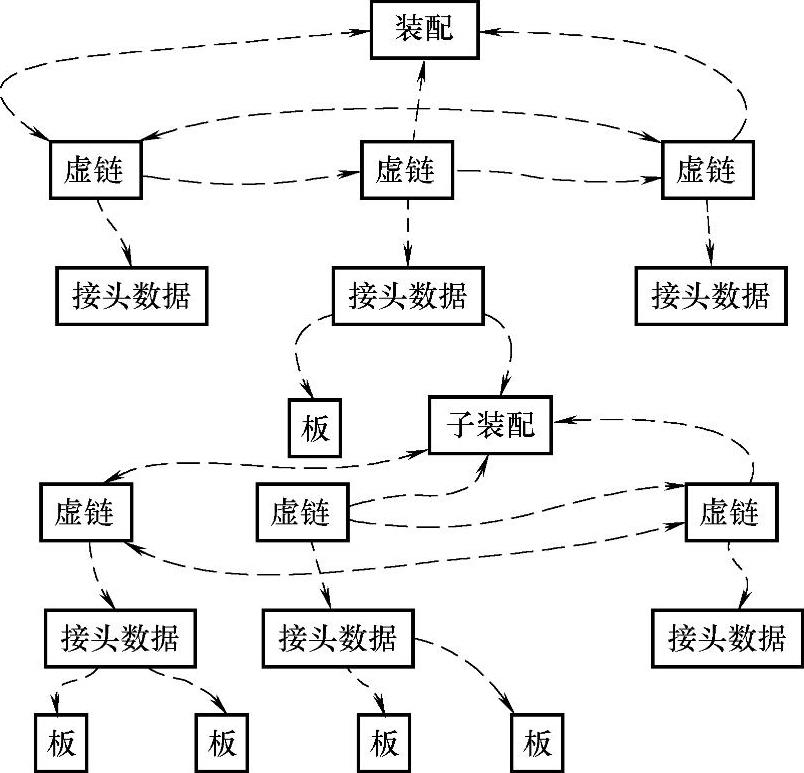
图2-25 焊接工件数据模型思维导图
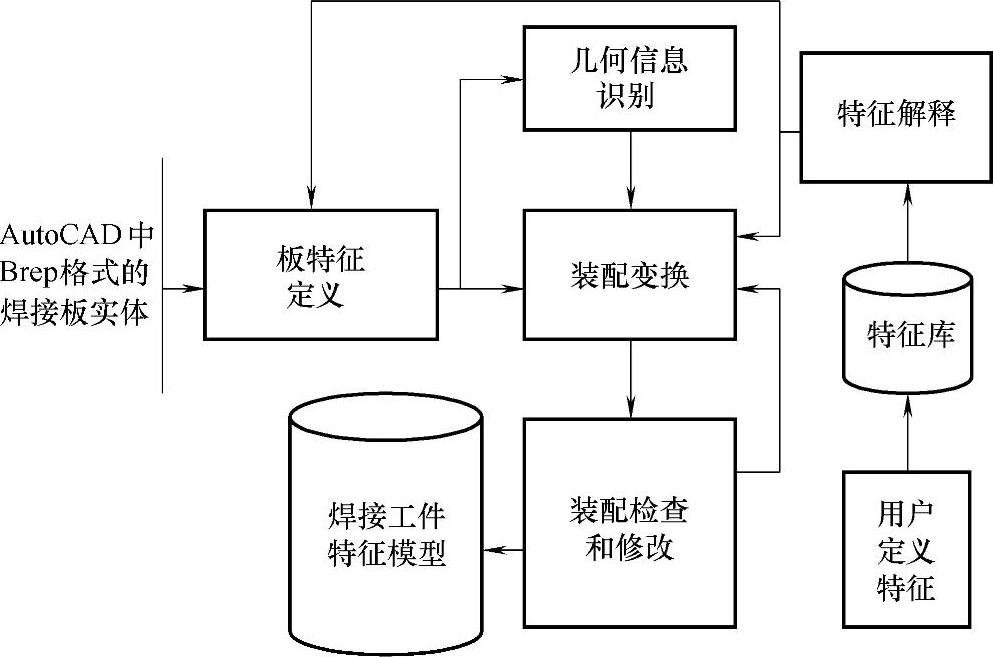
图2-26 特征建模系统
4.建模系统的界面及建模结果(https://www.xing528.com)
工件建模系统界面如图2-27所示。
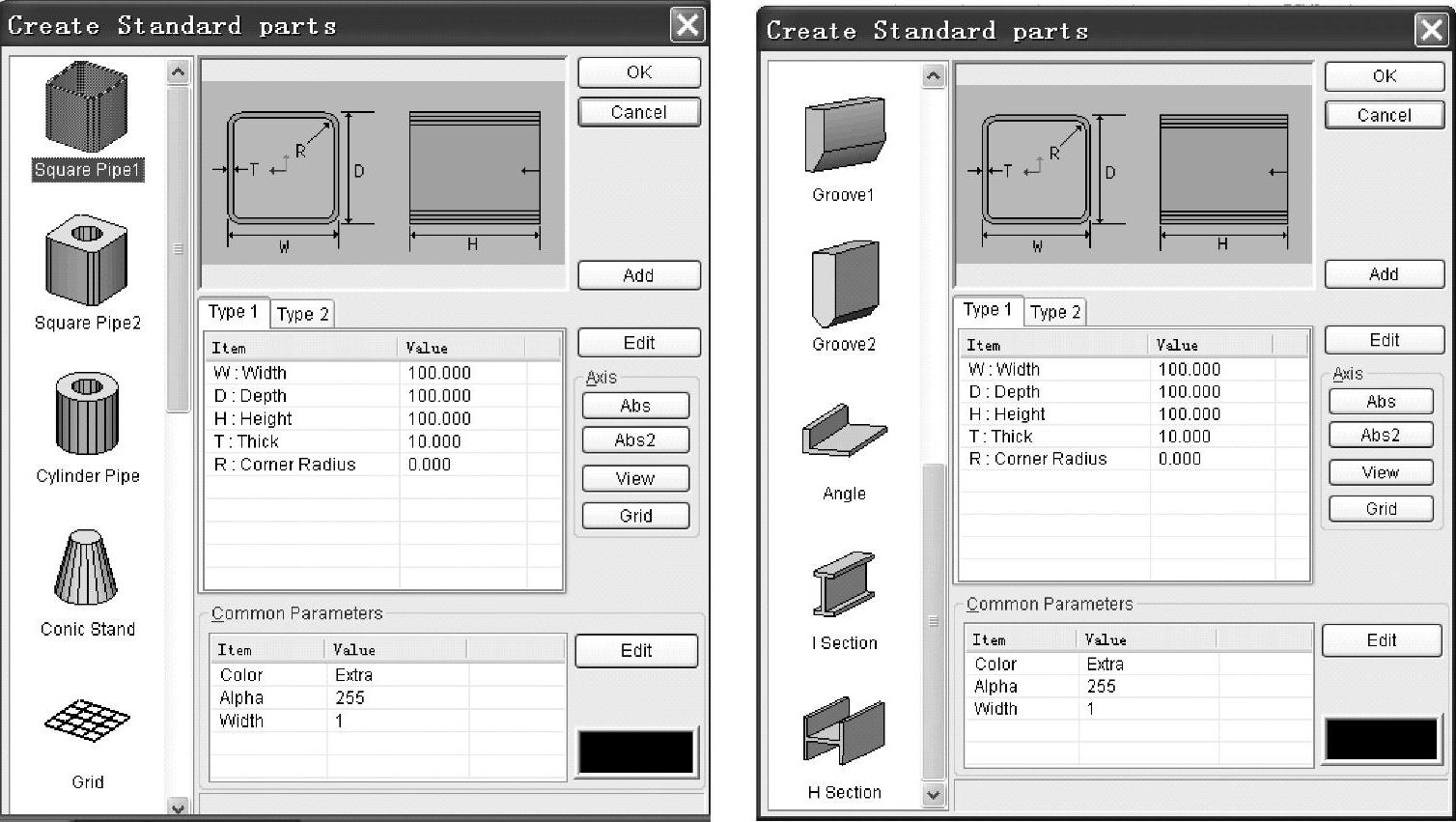
图2-27 工件建模系统界面
5.焊接参数规划技术
在某些商品化的离线编程软件(如WorkSpace、IGRIP等)中,机器人焊接所需的焊接参数都是由编程人员手工输入的,这样不仅使编程出错的几率增大,而且增加了编程的工作量。在任务级离线编程中,利用以人工智能技术为基础的焊接参数规划器自动确定焊接参数,将有效地提高机器人编程的效率和质量。
用户首先是在特征建模模块进行焊接结构的设计,并确定了工件材质、板厚、接头类型、坡口类型等参数,焊接参数规划器是根据这些参数去检索事例库,如果事例库中存在匹配的事例,则直接提供;若事例库中没有匹配的事例,程序自动进行智能推理,以便给出满足要求的焊接参数。焊接参数规划如图2-28所示。

图2-28 焊接参数规划
6.焊接机器人路径规划技术
焊接路径规划是指在焊接过程中确定实现最佳焊接质量的焊接机器人系统各路径点处的各关节值。焊接路径规划存在如下约束:焊接机器人系统的运动学闭链约束、焊接机器人和工件或卡具之间不发生碰撞、各关节值在关节限制之内、机器人灵活度优于最差灵活度。焊接路径规划的目标是实现最佳焊接质量。直接影响焊接质量的因素有两方面:因焊枪避碰原因而导致实际焊枪姿态偏离理想姿态;焊接机器人系统运动的平稳性。
焊接路径规划可分成以下两步:
第一步:最小化焊枪姿态偏离理想姿态的程度(工具级规划)。
第二步:最优化焊接机器人系统各关节运动的平稳性(机器人级规划)。路径规划示意如图2-29所示。
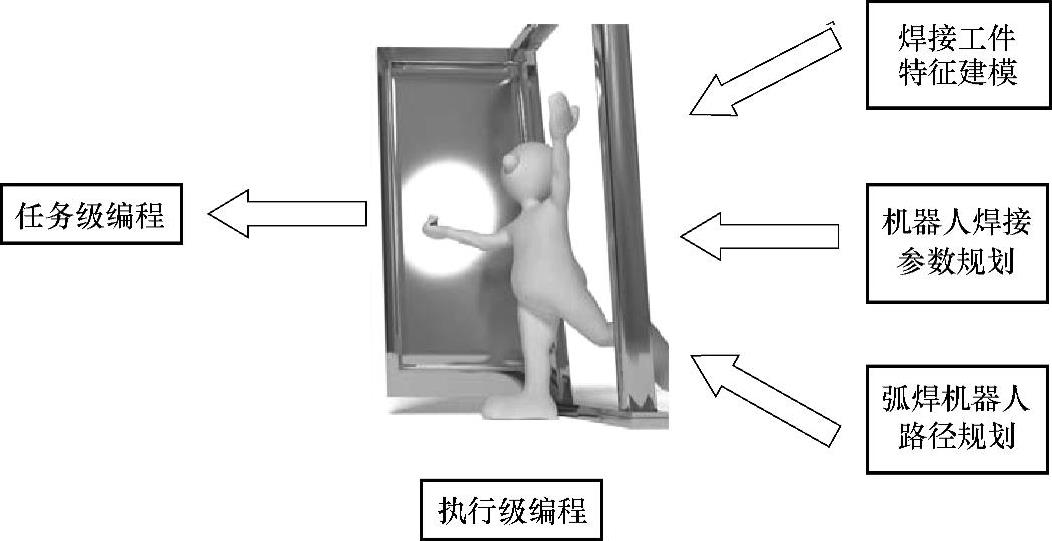
图2-29 路径规划示意
7.任务级离线编程器的结构
任务级离线编程器的结构如图2-30所示。
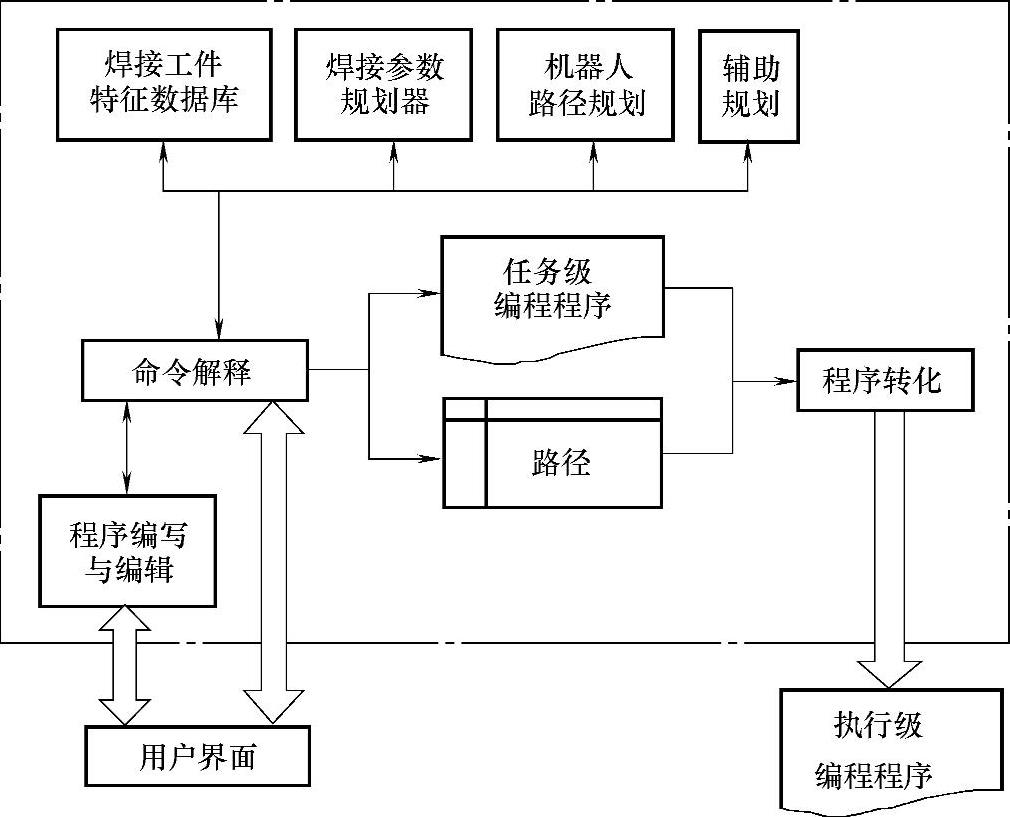
图2-30 任务级离线编程器的结构
思考题
1.机器人离线编程的概念和技术内容?
2.离线编程系统中的建模模块要完成哪几个方面的任务?
3.焊机器人离线编程系统的构成?
4.简述焊接工件的特征建模内容。
5.简述机器人任务级离线编程的概念。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。