



随着大批量工业化生产向单件小批量多品种生产方式转化,生产系统越来越趋向柔性制造系统(FMS)和计算机集成制造系统(CIMS),包括数控机床、机器人等自动化设备,结合CAD/CAM技术,由多层控制系统控制,具有很大的灵活性和很高的生产适应性。系统是一个连续协调工作的整体,其中任何一个生产要素停止工作都必将迫使整个系统的生产工序停止,占用了生产时间,所以,传统的机器人示教编程不适应于这种场合。另外,FMS和CIMS是一些大型的复杂系统,如果用机器人语言编程,编好的程序不经过离线仿真就直接用在生产系统中,很可能引起干涉、碰撞,有时甚至造成生产系统的损坏。所以,可以独立于机器人在计算机系统上实现的机器人离线编程方法就应运而生了。它是在计算机中建立设备、环境及工件的三维模型,在这样一个虚拟的环境中对机器人进行编程。
机器人离线编程系统是机器人语言编程的拓展,它充分利用了计算机图形学的成果,建立机器人及其工作环境的模型,再利用一些规划算法,通过对图形的控制和操作在离线的情况下进行编程。离线编程示意图如图2-14所示。
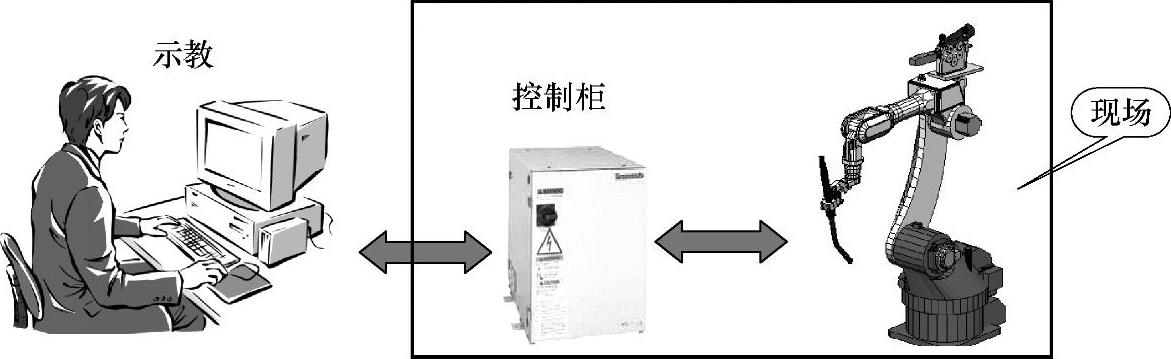
图2-14 离线编程示意图
1.机器人离线编程的概念和技术内容
机器人离线编程系统是利用计算机图形学的成果,建立起机器人及其工作环境的几何模型,再利用一些规划算法,通过对图形的控制和操作,在离线的情况下进行轨迹规划。通过对编程结果进行三维图形动画仿真,以检验编程的正确性,最后将生成的代码传到机器人控制柜,以控制机器人运动,完成给定任务。机器人离线编程系统已被证明是一个有力的工具,可以增加安全性,减少机器人不工作时间和降低成本。机器人离线编程系统是机器人编程语言的拓展,通过该系统可以建立机器人和CAD/CAM之间的联系。一个离线编程系统应涵盖以下技术内容:
1)所编程的工作过程的知识。
2)机器人和工作环境三维实体模型。
3)机器人几何学、运动学和动力学的知识。
4)基于图形显示的软件系统、可进行机器人运动的图形仿真。
5)轨迹规划和检查算法,如检查机器人关节角超限、检测碰撞以及规划机器人在工作空间的运动轨迹等。
6)传感器的接口和仿真,以利用传感器的信息进行决策和规划。
7)通信功能,以完成离线编程系统所生成的运动代码到各种机器人控制柜的通信。
8)用户接口,以提供有效的人机界面,便于人工干预和进行系统的操作。
此外,由于离线编程系统是基于机器人系统的图形模型来模拟机器人在实际环境中的工作进行编程的,因此为了使编程结果能很好地符合于实际情况,系统应能够计算仿真模型和实际模型之间的误差,并尽量减少二者间的误差。
2.机器人离线编程的组成(https://www.xing528.com)
机器人离线编程系统不仅要在计算机上建立起机器人系统的物理模型,而且要对其进行编程和动画仿真以及对编程结果后置处理。
机器人离线编程系统主要包括用户接口、机器人及环境的建模、运动学计算、轨迹规划、动力学仿真、并行操作、传感器仿真、通信接口、误差校正。机器人离线编程系统的构成如图2-15所示。
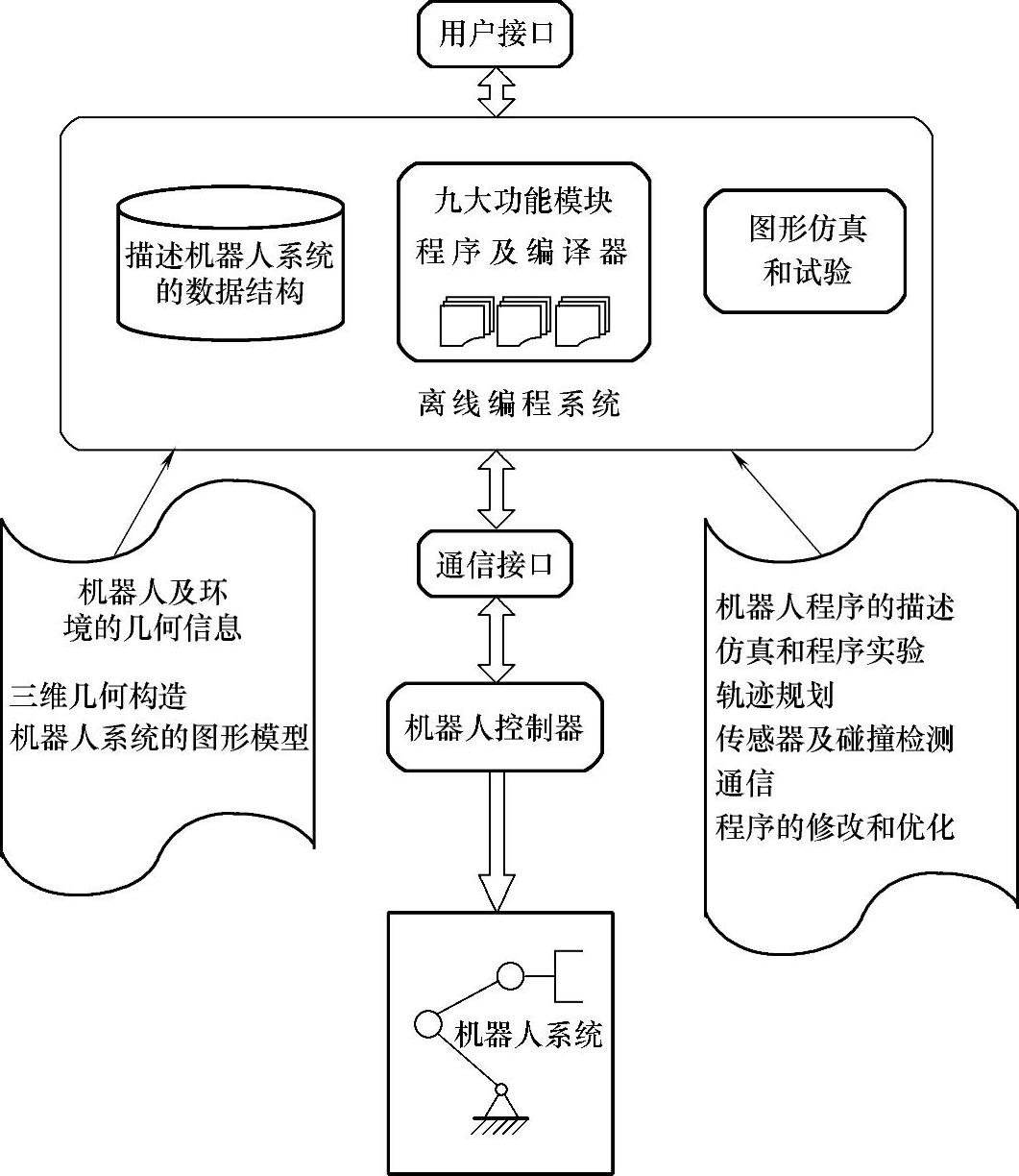
图2-15 机器人离线编程系统的构成
(1)用户接口 一般工业机器人提供两个用户接口,一个用于示教编程,另一个用于语言编程。作为机器人语言的拓展,离线编程系统把机器人语言作为用户接口的一部分。另外,用户接口的一个重要部分,是对机器人系统进行图形编辑,一般设计成交互式,可利用鼠标操作机器人的运动。
(2)机器人及环境的建模 这是离线编程的前提,必须构建机器人、夹具、零件和工具的三维几何模型,最好直接采用零件和工具的CAD模型。所以,离线编程系统应包括CAD建模子系统,可以集成到CAD平台上。若为独立系统,应具备与外部CAD文件的转换接口。
(3)运动学计算 离线编程系统需要进行图形仿真、碰撞检测等任务,需要进行运动学计算,包括正运动学及逆运动学计算。要求与机器人控制器采用一致的逆运动学算法,或直接提供直角坐标给机器人控制器,由控制器进行逆运动学计算。
(4)轨迹规划 离线编程系统除了对机器人静态位置进行运动学计算外,还应该对机器人在工作空间的运动轨迹进行仿真。由于不同机器人厂家所采用的轨迹规划算法差别很大,离线编程系统应对机器人控制器中所采用的算法进行仿真。轨迹规划模块根据起点、终点位置及约束条件,输出中间点位姿、速度、加速度的时间序列,还应该具备可达空间计算及碰撞检测等功能。
(5)动力学仿真 如果机器人工作在高速及重负载的情况下,必须考虑动力学特性,以防止产生比较大的误差。
(6)并行操作 有些场合常涉及两个或多个机器人同时完成一个作业,有时,既使一个机器人工作,也常需要和变位机、传送带等系统配合。因此,离线编程系统应能对多个设备进行同时仿真。可以采用多处理器技术,通常采用单处理器分时操作(多任务系统)。
(7)传感器仿真 在实际机器人系统中,可能装有各种传感器。在离线编程系统中,对这些传感器进行建模并仿真是很重要的。传感器主要分为局部的和全局的两类,局部传感器有力觉、触觉和接近觉传感器。触觉阵列的几何模型分解成一些小块,检查每个几何块与物体间的干涉,确定接触情况。
接近觉传感器也可利用几何模型件的干涉检查来仿真,将长方体分成许多小块,与物体相交的块数可以表示接近的程度,利用相交部分的体积可以仿真力觉传感器。
(8)通信接口 连接离线编程系统与机器人控制器。利用通信接口可以把仿真系统所生成的机器人运动程序转换成机器人控制器可以接受的代码。由于不同厂家生产的机器人所用的语言系统不同,使离线编程系统的通信接口的通用性受到限制。
(9)误差的校正 离线编程系统中的仿真模型与实际机器人模型存在误差,需要对这些误差进行校正。误差来源:机器人连杆制造误差、传动间隙、机器人刚度不足、相同型号机器人的不一致性、控制器的数字精度、温度等外部环境的影响可增加标定模块及传感器补偿。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。