



机器人是受程序控制的机械、电子装置,通过编程定义其作业内容。目前,机器人的编程类型主要有示教编程、机器人语言编程与离线编程三种方式。其中,以示教编程最为普遍。
1.示教编程的种类
示教编程通常有两种方式,即手把手示教(用手移动机器人,属于早期示教形式)和示教盒示教(用示教盒移动机器人,目前多属于此类形式)。机器人示教盒的外形及各部位的标识如图2-4所示。
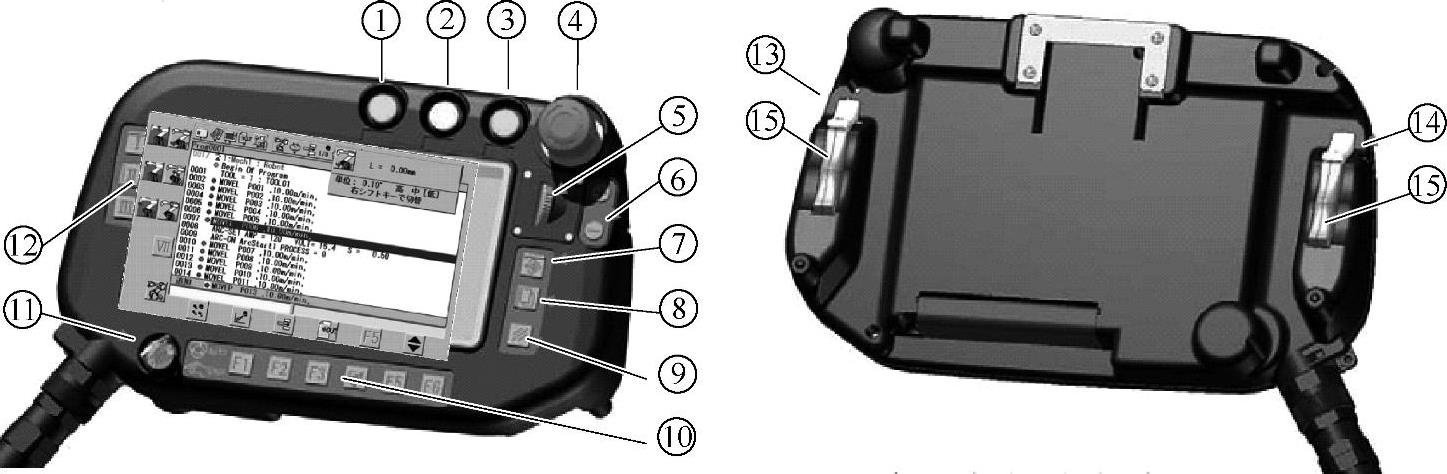
图2-4 松下GⅢ机器人示教盒(示教器)正面和背面外形图
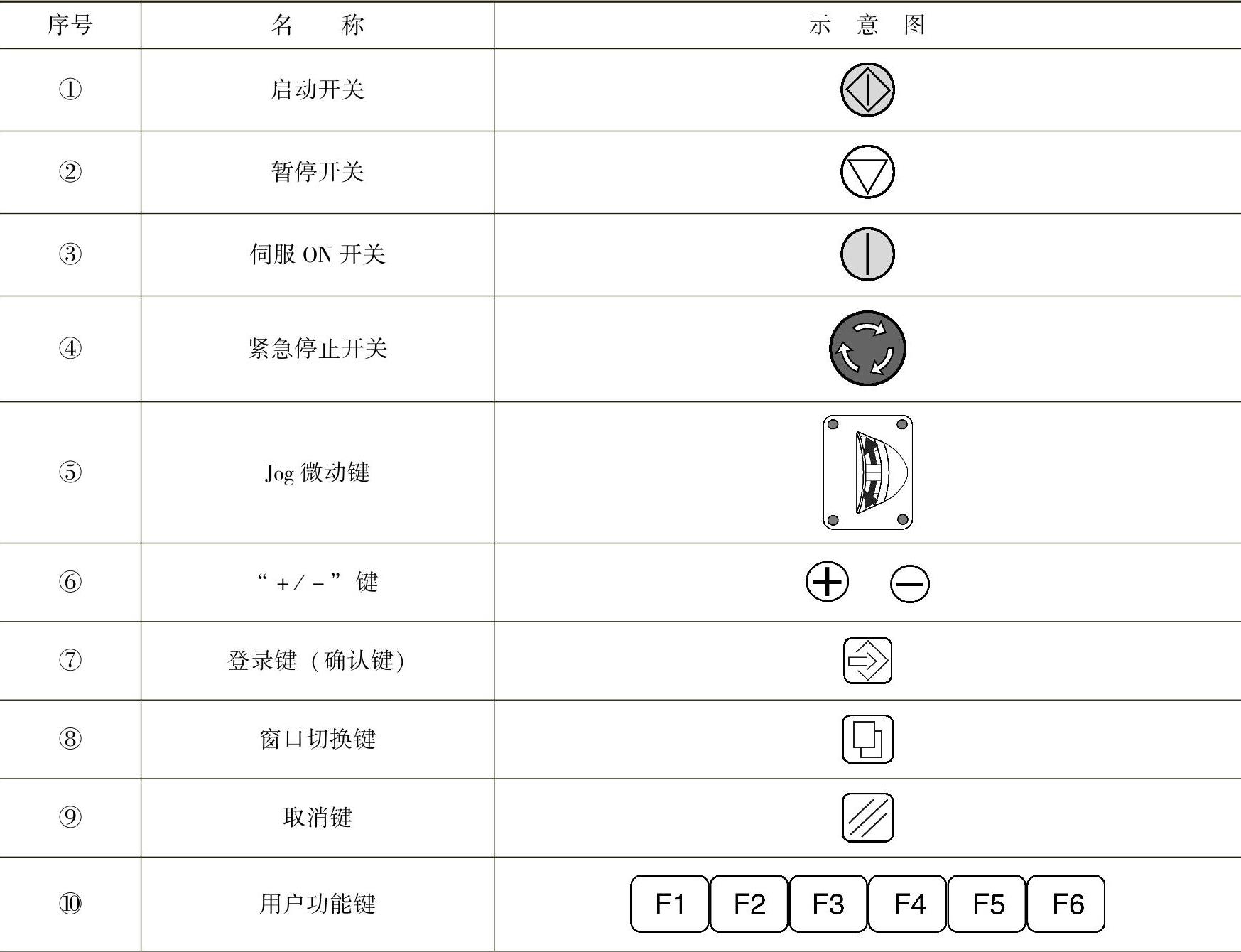
机器人示教盒各部位名称及示意图见表2-2。
表2-2 机器人示教盒各部位名称及示意图
(续)

示教编程是工业机器人广泛使用的编程方法,编程人员根据任务的需要,将机器人末端工具移动到所需的位置及姿态,然后把每一个位姿连同运行速度、焊接参数等记录并存储下来,机器人便可以按照示教的位姿再现,如图2-5所示。

图2-5 示教编程示意图
2.示教编程的优、缺点
(1)示教编程的优点 不需要预备知识和掌握复杂的计算机装置,方法简单、易于学习。在机器人所要完成的任务不很复杂以及编程时间相对于工作时间比较短的情况下,示教编程是有效可行的。
(2)示教编程的缺点
1)机器人的在线示教编程过程繁琐、效率低。在许多复杂的作业以及频繁更换工件的场合,机器人的生产效率较低。由于示教编程工作必须在现场完成,编程人员主要通过眼、脑、手的配合进行示教,因此,对编程人员眼睛的观测精度和观测方法有较高要求。下面列举机器人焊接培训基地学员在取证考试现场对指定工件进行示教的场景,如图2-6所示(参见配套光盘资料⑥考证试件离线程序仿真视频)。

图2-6 编程人员在练习示教工件
对于焊缝较为复杂的工件,例如马鞍形(相贯线)焊缝工件的焊缝路径及焊枪角度变化关系,焊枪角度需要跟随焊缝位置变化相应作出焊枪姿态的改变,现场示教难度较大,耗时较长,如图2-7所示。

图2-7 马鞍形焊缝工件与焊枪角度变化示意
为了保证轨迹的精度,通常在100mm的焊缝上,需要示教50个点,以保证焊接机器人运行平滑及收弧点位置的一致。在每段的在线示教与编程中,约需要2h的时间。因此,如何提高编程的效率及精度,缩短产品总的焊接时间,提高焊接质量成为机器人生产需要迫切解决的问题。
2)视觉误差。视觉误差主要反映在视距误差和视角误差。误差是指测量结果偏离真值的程度。对任何一个物理量进行的测量都不可能得出一个绝对准确的数值,即用测量技术所能达到的最完善的方法,测出的数值也和真实值存在差异,这种测量值和真实值的差异称为误差。而视觉误差是指人和动物通过视觉感知外界物体的大小、明暗、颜色、动静所获得的信息与被感知外界物体真实的大小、明暗、颜色、动静之间的差别。结合机器人示教编程工作,对于焊接机器人设备而言,系统的重复定位精度一般小于±0.1mm,对于薄板焊接,焊丝的示教偏离程度不能大于±0.5mm,否则可能导致焊接失败。由于焊接机器人的编程示教过程是通过“眼”→“脑”→“手(动作)”的配合,所以,示教的精度完全取决于示教者的经验和目测结果,对于复杂路径难以取得令人满意的示教效果。示教过程的眼、脑、手配合示意图如图2-8所示。(https://www.xing528.com)
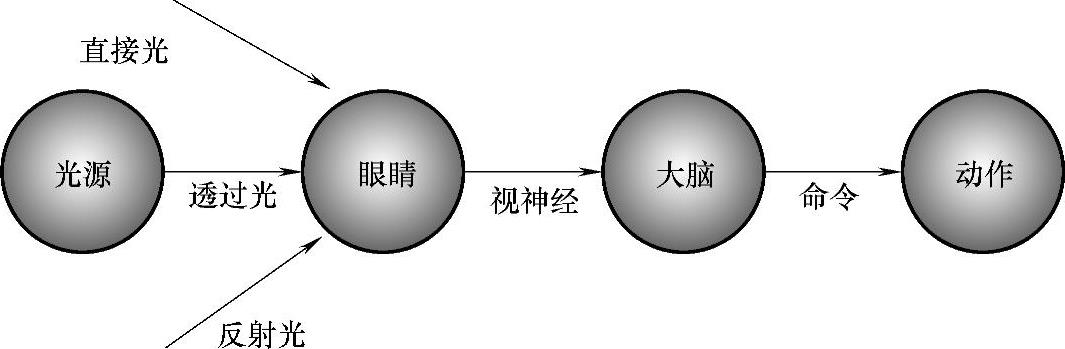
图2-8 示教过程的眼、脑、手配合示意图
下面,我们从眼睛的视觉原理解释视觉误差产生的原因。眼睛的视觉原理简述如下:
人眼的结构相当于一个凸透镜,外界物体在视网膜上所成的像是倒立的实像。涉及大脑皮层的调整作用以及生活经验的影响,倒立的像通过视网膜上的视神经传输到大脑,大脑将其转换成正立的像。眼睛之所以能看见周围的各种物体,一是必须有光,二是眼球内具有可以成像的构造。当我们睁开眼睛,从周围物体发射或反射而来的光,穿过瞳孔和晶状体,聚集在眼睛后面的视网膜上,形成这些物体的图像,连接视网膜的视神经立即把这些信息传送到大脑,所以,我们就能看到外界物体。眼睛的观测景物的原理如图2-9所示。
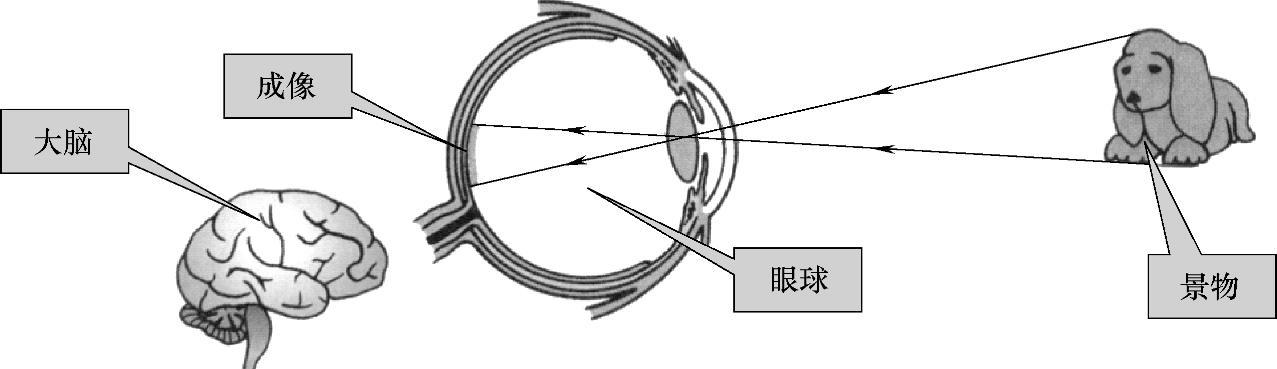
图2-9 眼睛的视觉原理
眼睛在观测远、近物体时是通过晶状体的调节作用实现的,当睫状肌放松时,晶状体变薄,远处来的光线恰好会汇聚在视网膜上,眼球可以看清远处的物体。当睫状体收缩时,晶状体变厚,近处来的光线恰好会聚在视网膜上,眼球可以看清近处的物体。
①视觉疲劳误差。眼睛在看近处物体时,屈折力就要增加,以使近物能汇聚在视网膜上,形成清晰的物像。眼睛的这种调节功能是通过睫状肌的收缩和晶状体固有的弹性两个因素完成的。看近处物体时晶状体变凸,看远时晶状体则扁平。所以,要维持眼睛的正常调节作用,必须要有健全的睫状肌功能及晶状体的可塑性,二者缺一不可。
如果晶状体的肌肉总是处于紧张状态,时间长了,肌肉就会疲劳,失去调节能力,看到的景物就会模糊。眼睛晶状体的调节作用如图2-10所示。
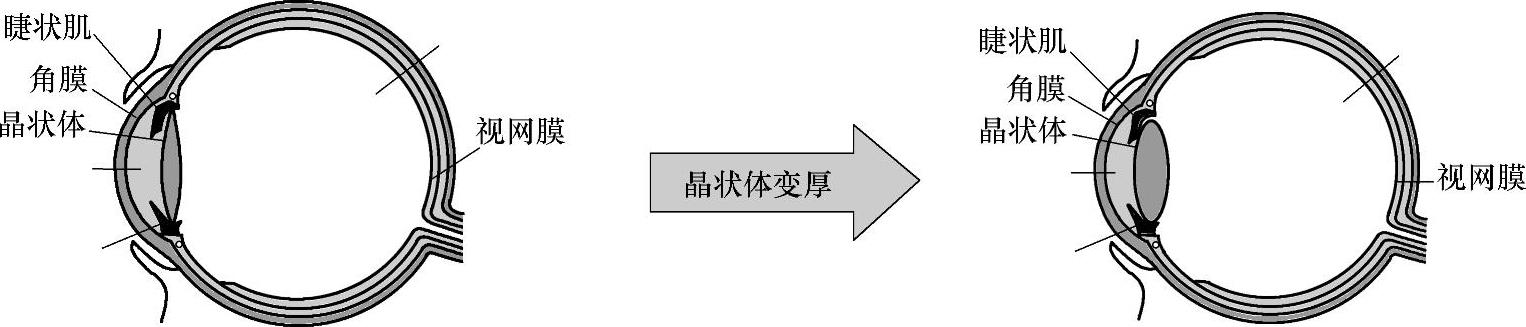
图2-10 眼睛晶状体的调节作用示意图
②视距误差。眼睛可以观测较远和较近的物体,当物体与眼睛的晶状体(凸透镜)的距离大于透镜的焦距时,眼睛从较远处向物体靠近时,成像会逐渐变大,如图2-11所示。

图2-11 眼睛成像放大的原理
图2-11a为人眼观测物体的图示,图2-11b为凸透镜(类似眼睛的晶状体)成像画法,图中L代表凸透镜,F为透镜焦距,P代表视网膜、AB代表物体、A′B′代表视网膜上的成像。结合编程示教工作,眼睛离工件位置越近、成像越大,焊缝看得越清楚。焊缝离眼睛越远,成像越小,越不利于观察。实际工作中,编程示教人员容易出现在较远的距离观察示教点位置,造成视距误差的产生,致使焊丝偏离焊缝的情况发生。编程示教人员眼睛与示教点的最佳观测距离为100~500mm。
③视角误差。人以左右眼看同样的对象,两眼所观测的角度不同,在视网膜上形成的像并不完全相同,这两个像经过大脑综合分析以后就能区分物体的前后、远近,从而产生立体视觉。还有一种情况:如果示教编程人员处于高位向斜下目测焊丝端部与焊缝位置来确定位置点,这时,便容易产生视角误差。眼睛的视角误差如图2-12所示。
假设图中左右眼在高处观察景物位置,此时,近处景物为前点(实际位置点),远处景物为后点(眼睛观测到的位置点),这时就产生了视角误差。
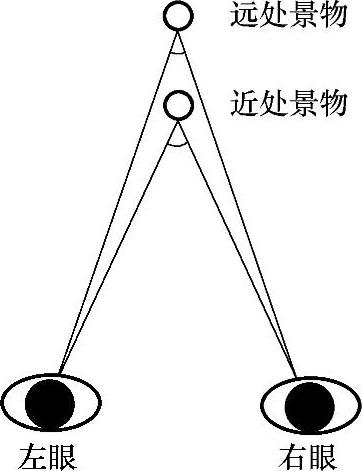
图2-12 眼睛的视角误差
所以,对一个示教点的确定,一是要近距离观察,另外,需要前后、左右、上下观察并修正焊枪位置,以消除从一个角度观察所产生的视角误差。
④光线对视觉的影响。在较暗的光线下,瞳孔会变大,使更多的光线进入眼中,而在明亮有光线下,瞳孔变得很小,是为了防止过多的光线射入眼中损坏视网膜。所以,示教现场的光线强弱对眼睛的视力会有一定影响。
3)在线示教的其他一些误差。焊枪在不同的示教位置,由于焊枪电缆弯曲状态会使焊丝伸出长度发生变化,产生焊丝伸出长度误差,导致弧长及焊接参数变化。另外,伸出的焊丝处于非自然状态的弯曲、导电嘴磨损、TCP点不准均会造成在线示教误差。
4)对于一些需要根据外部信息进行实时决策的应用,在线示教更是无能为力。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。