



目前,计算机硬件、操作系统平台、网络通信技术都已经达到了很高的水平,为加工制造业提供了广阔的前景,因而工业机器人自身的软件领域的创新、编程和仿真技术的提高,对工业机器人的推广及其应用效率发挥起着越来越重要的作用。日本松下公司开发的应用于教学培训的“焊接机器人教学系统”其基本构成和功能如下所述。
1.硬件构成
实际的机器人设备主要由机器人本体、机器人控制箱和机器人示教器三部分组成。它们之间通过快速(插接)端子进行连接实现通信,如图1-26所示。
焊接机器人教学系统则采用电脑屏替代实体机器人,利用真实的机器人示教器(实物)练习,在计算机屏(或其他显示器)上进行机器人动作的模拟,学习机器人的编程和操作。设备成本低,安全系数高,便于课堂教学和训练,适用于初学者进行学习和训练。
焊接机器人训练系统采用与标准机器人单体实物同样的示教器和示教器电缆,示教器(又称TP)需要配带监视器输出端子,以便于与计算机屏(虚拟机器人)连接。焊接机器人训练系统的硬件部分如图1-27所示。
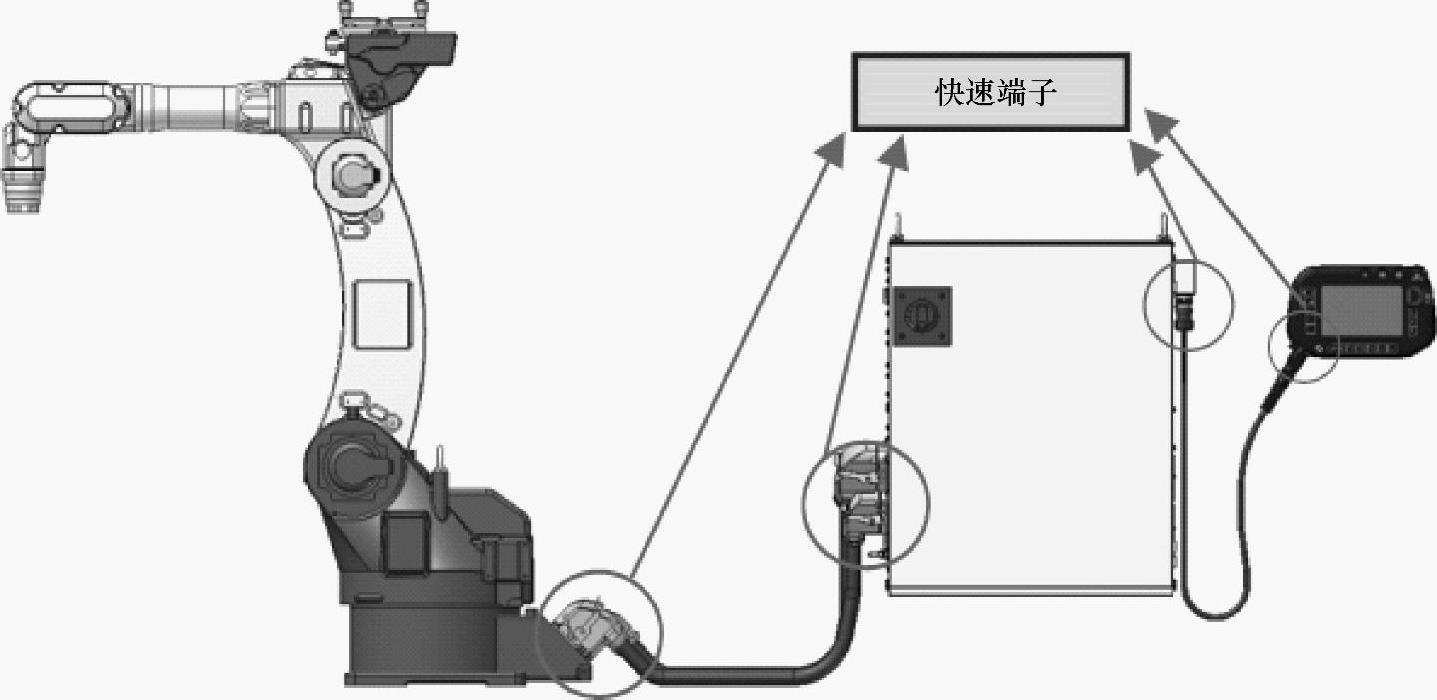
图1-26 机器人设备构成示意图
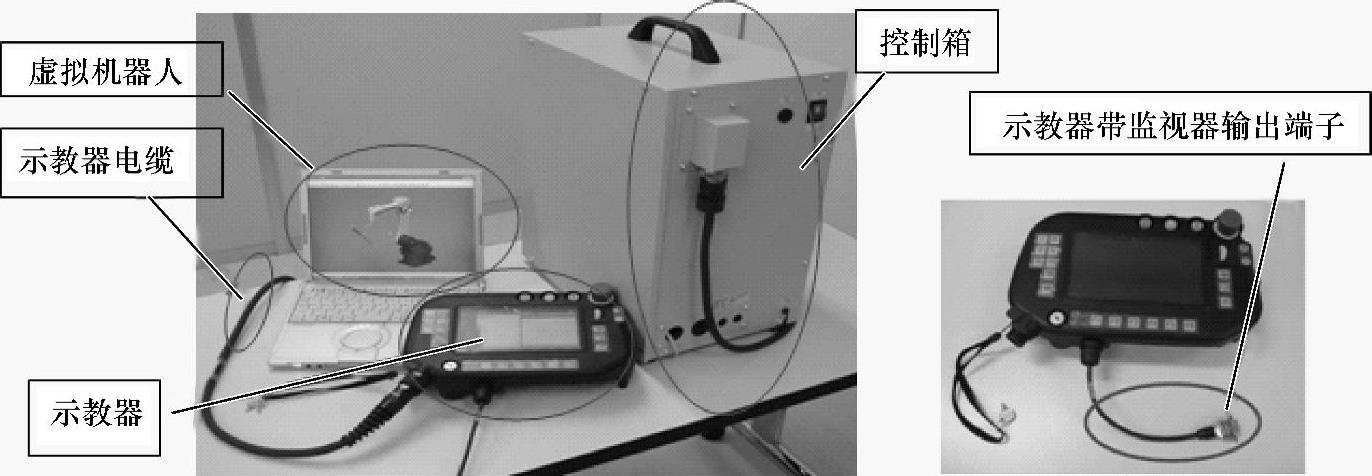
图1-27 机器人模拟仿真教学系统的硬件组成
焊接机器人教学系统的控制箱内部由背板、主CPU板、伺服CPU板、次序板、安全板、焊接控制板、电源板等主要元器件组成,并且这些电路和实际的机器人控制箱完全一样,可互换使用。焊接机器人训练系统控制箱内部构造如图1-28所示。
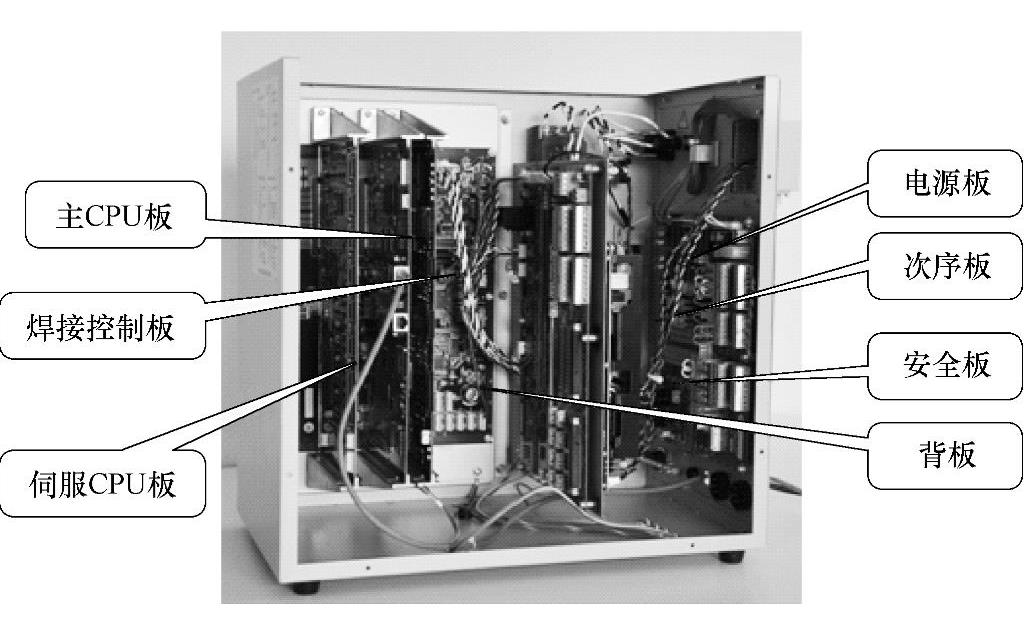
图1-28 焊接机器人训练系统控制箱内部构造
仿真教学机器人的操作方法和实际机器人完全相同,且使用安全。其硬件系统与实际机器人单体的硬件构成对比如图1-29所示。
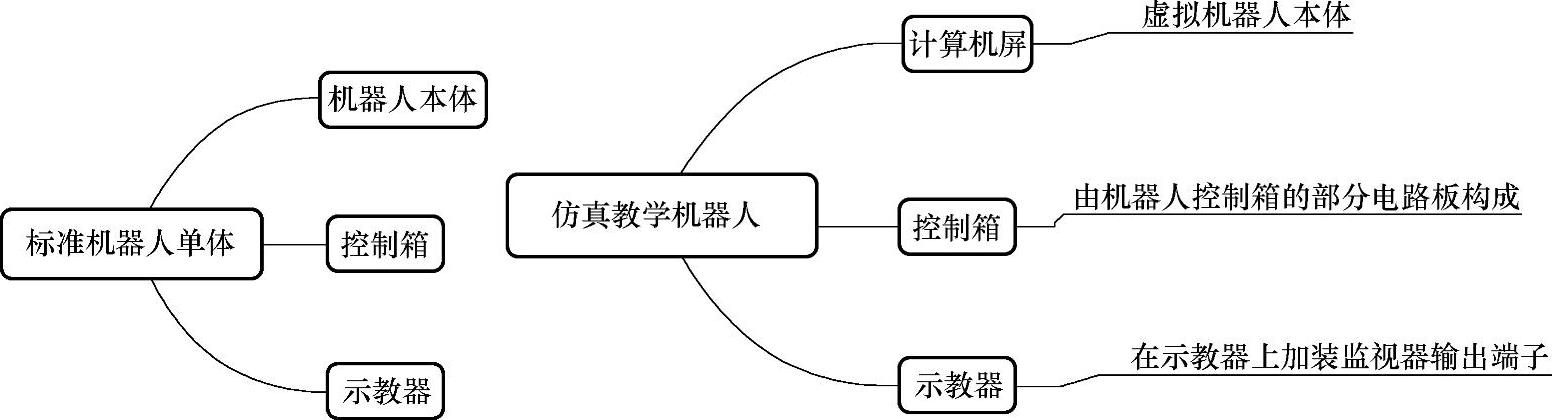
图1-29 标准机器人与仿真教学机器人硬件构成对比
借助计算机的数学模型来虚拟空间中的机器人本体和空间上的示教点,例如,利用虚拟空间的特点,事先对所示教的工件标出空间上的“接近点”和“退避点”,这样更便于学习和掌握机器人编程和焊接的基本操作要领,实现了机器人操作训练的离线化。机器人操作训练的离线化学习如图1-30所示。
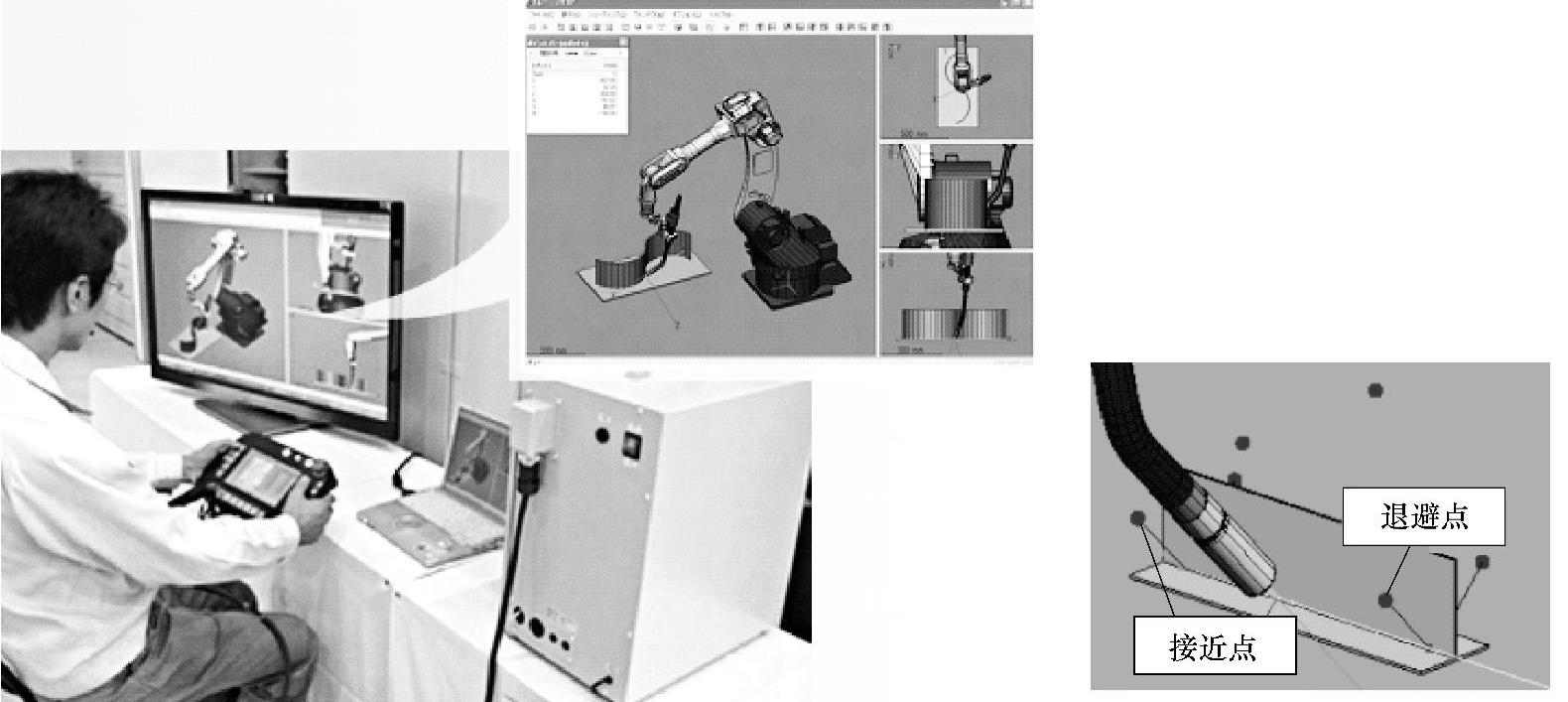
图1-30 机器人操作训练的离线化学习
2.系统功能
机器人仿真教学系统可以模拟完成真实机器人所具有的各种示教功能、编辑功能和焊接功能,操作者的视觉和触觉等同于操作真实的机器人。系统具体的功能汇总如下:
1)程序的编写完成、保存、编辑、打开。
2)程序的运行。
3)手动动作。
4)选择菜单。
5)追加、变更、删除示教点。
6)追加、变更、删除次序指令。
7)跟踪操作。
8)对机器人进行基本设定。
9)切换示教/运行模式。
10)可在计算机上显示、添加工件模型(工件模型需利用DTPS转成“g2p”格式)。(https://www.xing528.com)
11)多角度显示虚拟机器人,并可进行画面的分割、缩放、旋转等操作。
12)设定焊机(目前仅支持TAWERS,即电源融合型机器人)。
13)默认准备标准焊枪模型。
14)示教器带视频输出端子,可将示教器画面输出到等离子上。
15)支持SD卡和U盘的数据读取、全备份数据的读取等。
另外,对于系统工件配置,可根据工件位置及方向任意设定;也可同时配置多个工件;通过在与实际设备相近的位置配置类似工件,可进行实际操作练习。焊接位置有对接、T角接、搭接、有间隙的搭接、圆弧焊接等。具体工件有喇叭口、箱体、圆弧组合、法兰管子、管板等,均可将这些工件模型添加在系统里。通过虚拟显示仿真机器人示教场景如图1-31所示。
系统可根据需要,焊枪仿真模型类别可选,如图1-32所示。
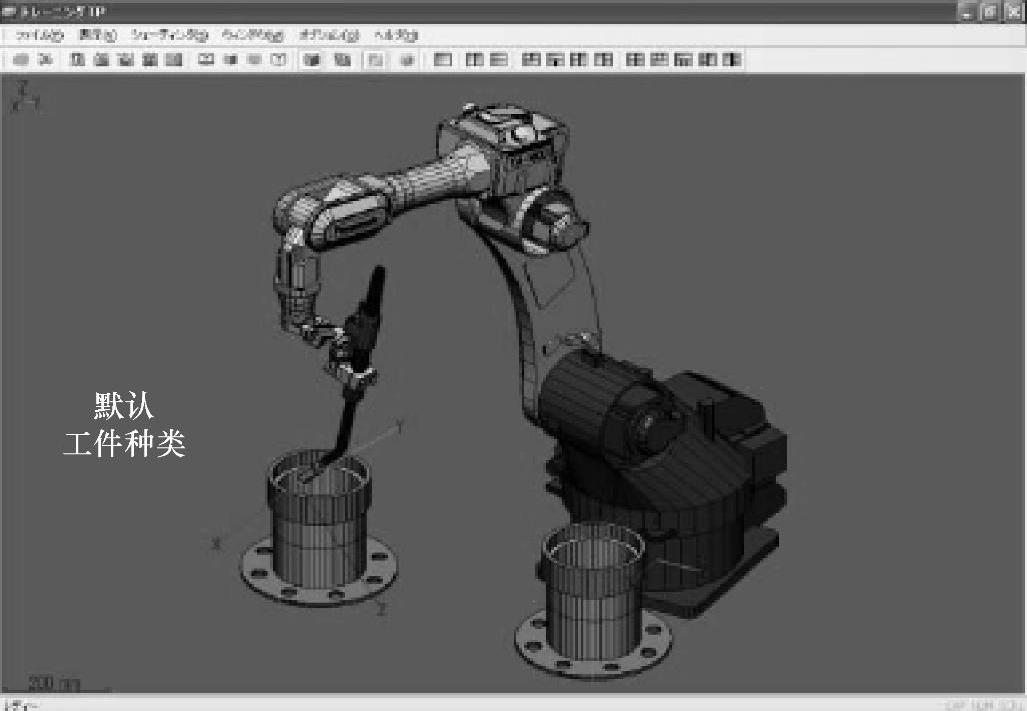
图1-31 通过虚拟显示仿真机器人示教场景

图1-32 焊枪仿真模型可选
实际的使用中,可以将机器人系统模型和示教器程序界面分别投射到两个显示器上,实现机器人示教培训的课堂化,提高了学习效率,避免了初学者在机器人操作训练教学过程中可能出现的困难和问题,如图1-33所示。
3.系统规格
1)名称及型号:虚拟机械手系统/YA-1UPCT21。
2)系统构成:控制箱、示教器电缆、示教器、软件(CD)。
3)输入电压:单相220V。
4)对应机型:TA-1400(焊枪外置式),对应TA-1000160018001900;TB-14001800(焊枪内置式)时,需由服务人员对机型进行变更。不对应HS-165G3(其中一款机器人型号)。
5)模拟前准备物品:计算机一台(Windows系统)、鼠标、网线、监视器(教学时需要2个显示器,一个用于显示示教器画面,另一个显示机器人本体动作)、监视器电缆。
6)限制事项:无法显示及操作外部轴,不能对应工件回转示教,导入的实际工件与设备需与DTPS(机器人离线编程软件)配合使用。
机器人模拟仿真教学系统的编程操作与实际的机器人操作基本相同,详细的操作方法可参考《焊接机器人基本操作及应用》一书,这里不再赘述。
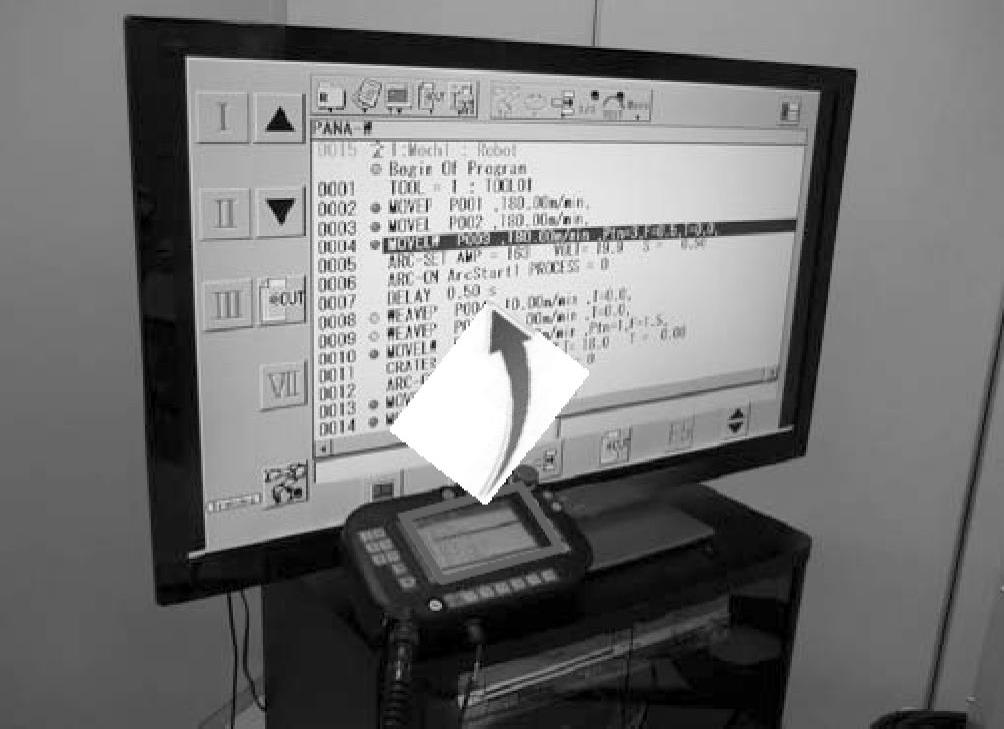
图1-33 示教器界面显示投射到教学显示器上的图片
思考题
1.何谓系统仿真?仿真技术发展的三个不同层次?
2.何谓虚拟现实?简述虚拟现实的三大特征。
3.简述系统仿真系统仿真的一般步骤。
4.焊接训练仿真系统有哪些特点?
5.在机器人仿真的具体实现上,有哪些途径?
6.简述“焊接机器人教学系统”的基本构成。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。