



同步电动机的控制系统应该包括定子绕组的电源控制装置和励磁控制装置,其中前者的控制电路与异步电动机控制电路类似,下面介绍励磁装置的功能与基本工作原理。
1.励磁装置的功能
可以为高压或者低压同步电动机、全压起动或者减压起动提供励磁支持。
同步电动机在起动或者停止时,能自动灭磁,避免同步电动机及装置遭遇感应电压击穿。
同步电动机在减压起动过程中,当转子转速升高达到额定转速的90%时,自动给定子绕组投入100%的额定电压,同步电动机在全压条件下完成起动过程并进入正常运行状态。
同步电动机起动过程中,当转子的转速达到额定转速的95%时,励磁装置自动投入励磁,将同步电动机引入同步运行状态。
当电网电压波动降低到额定电压的80%时,及时投入强励磁,保证同步电动机能够稳定运行。
当电动机出现失步而在设定的时间没有恢复,装置首先实施整步,如果整步失败则发出保护信号,或作用于跳闸。
2.励磁装置单元电路工作原理分析
(1)灭磁环节:如前所述,同步电动机起动时励磁绕组不能开路,为了避免起动时励磁绕组中产生较大的电流,这时给励磁绕组串联放电电阻RD1、RD2(见图5-15);投入励磁后,放电电阻自动退出,为了实现这一电路效果,在励磁回路中加入了灭磁环节。
图5-15中,V是励磁电压表,KP1和KP2是灭磁晶闸管(文字符号与励磁装置一致,方便对照原资料分析、维修)。同步电动机通电起动后至投入励磁前的一段时间内,励磁装置不向三相全控桥上的晶闸管发送触发信号,三相全控桥的晶闸管处于阻断状态,无直流电输出。同步电动机起动时,转子励磁绕组感应交变电压,当该感应电压在励磁绕组13端为正(见图5-15)的半个周期时,二极管VD1导通,感应电压经RD2、VD1、RD1形成回路,由于放电电阻RD1和RD2阻值较小,所以感应电压经该回路放电后已经很小。当感应电压在励磁绕组15端为正(见图5-15)的半个周期时,二极管VD1截止。该半个周期刚开始时感应电压幅值较小,达不到晶闸管KP1和KP2的导通电压,感应电流通过电阻RD1、19R1、19R2、电位器19RP1和电阻19R3、19R4、电位器19RP2、电阻RD2等元件形成回路,由于该回路电阻值较大,是转子励磁绕组直流电阻的数千倍,所以相当于在开路状态起动,感应电压急剧上升,当感应电压达到一定值后,稳压管19VS1和19VS2击穿导通,晶闸管KP2与KP1导通,励磁绕组的感应电压经过晶闸管KP2和KP1,与放电电阻RD1和RD2构成一个阻值很小的放电回路放电,直到这半个周期结束时,晶闸管KP1和KP2由于电压过零而自行关断。
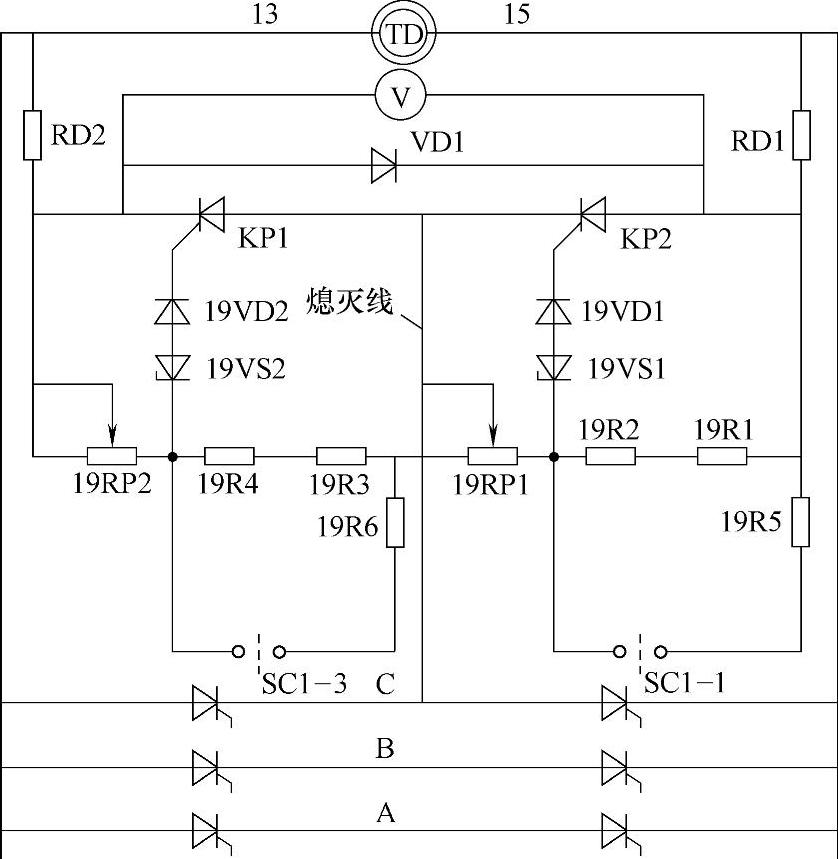
图5-15 灭磁环节电路原理示意图
调整电位器19RP1和19RP2的阻值就能改变晶闸管KP2和KP1的导通电压。
图5-15中的转换开关SC1-1、SC1-3可用来检测灭磁电路正常与否。检测时,使励磁装置处在调试状态,励磁电压、励磁电流均应为设定值,这时操作转换开关SC1,使其触点闭合,电阻19R5与19R1、19R2并联,19R6与19R3、19R4并联,由于19R5和19R6阻值较小,这就相对增加了电位器19RP1和19RP2上的电压降,灭磁晶闸管更容易导通。所以此时励磁电压表指示回零;转换开关SC1复位,电压表恢复正常值。
同步电动机在起动过程中,转子励磁绕组经灭磁后的电压波形如图5-16所示。

图5-16 灭磁后转子感应电压波形
图5-15中KP1和KP2的公共端与三相全控整流桥的C相相连,这条连接线叫做熄灭线,当投入励磁后KP1和KP2必须关闭,否则整流电路需要为灭磁电阻提供电流。投励磁后,C相上连接的两只整流晶闸管将会先后导通,必将使与之等效并联的晶闸管KP1、KP2在一个电源周期时间内被短路而截止,灭磁电阻自动退出电路。
稳压管19VS1、19VS2对晶闸管KP2和KP1起开关控制的作用,投入励磁后,直流励磁电压在电位器19RP1、19RP2上的压降低于稳压管19VS1、19VS2的击穿电压,稳压管不能导通,晶闸管KP2和KP1处于关闭状态。
(2)投全压及投励:所谓投全压及投励,就是同步电动机在减压起动过程中,电动机转速达到同步转速的90%时,给定子绕组投入全压,即100%额定电压;电动机转速达到同步转速的95%时(无论全压起动还是减压起动),给转子绕组投入励磁电流,将转速拉入同步。
同步电动机在起动时,励磁绕组两端感应一个频率由50Hz向0Hz逐渐降低的正弦波电压,该电压频率值与转差值相对应。励磁装置将转子感应的上述正弦波电压转化为方波信号(见图5-17)送给相关控制电路,控制电路检测方波信号的脉宽,并由此判断脉宽对应的频率以及同步电动机的转速,当转速达到预设的投全压值时,相应继电器触头动作,控制投入全电压;当转速达到预设的投励值且在方波上升沿时(确保顺极性投励),开始向三相全控桥发送触发脉冲信号,三相全控整流桥开始有整流输出电压,向励磁绕组投入励磁电流。
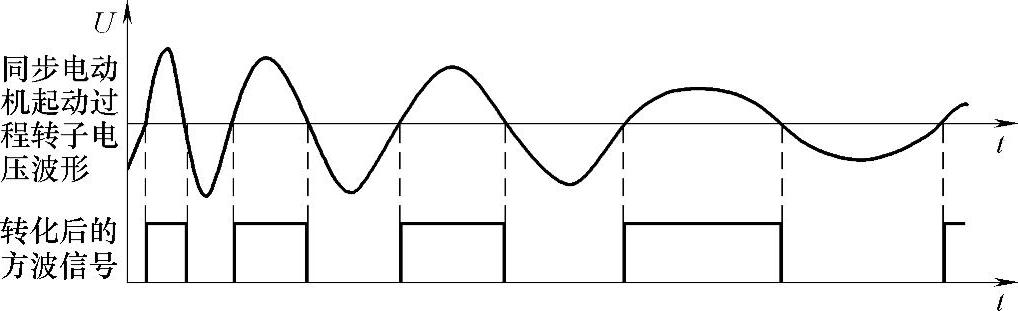
图5-17 起动时励磁绕组感应电压及转化后的方波信号波形(https://www.xing528.com)
当按转差投全压及投励在设定的时间内无法完成,控制电路将会发出强制投全压及投励的信号,称做定时投全压与投励。一般设定投全压的时间为3s,定时投励的时间为5s。
(3)励磁电流的给定、负反馈调节及强励:励磁电流的给定、负反馈调节和强励控制是励磁装置中的一个重要电路,其功能是调节控制励磁电压的高低和励磁电流的大小。所谓给定,是指根据同步电动机的运行需求,预先设定一个适当的给定励磁电流值;所谓负反馈调节,是根据电源电压的高低,利用负反馈电路控制与调节励磁电流的大小,使之趋于稳定;强励功能是电源电压下降到额定电压的80%时,自动强制提高励磁电压和励磁电流的一种技术措施,可以保证同步电动机在电压降低时能够稳定地持续运行。
给定电路使用一个电压非常稳定的直流电源,该电源的交流输入电压相对较高,经过桥式整流和电容器滤波后的电压幅值相应也较高,如图5-18a、b和c所示,之后用一个雪崩电压较低的稳压二极管削波稳压后,得到图5-18d所示的幅值较小但几乎没有任何纹波的稳定直流电压。一个电位器对这个稳定电压调整分压,取得给定电压,用来调整励磁电流。选用这样的直流电源,就是为了让给定电压信号非常稳定,从而保证励磁电流的稳定。为了分析方便,姑且将这个电压称做Ea。
负反馈调节选用的直流电源是随交流电源电压变化的一个直流电压,另一个电位器对这个电压进行调整分压,获得一个随电源电压变化的负反馈信号电压。我们把这个电压称做Eb。
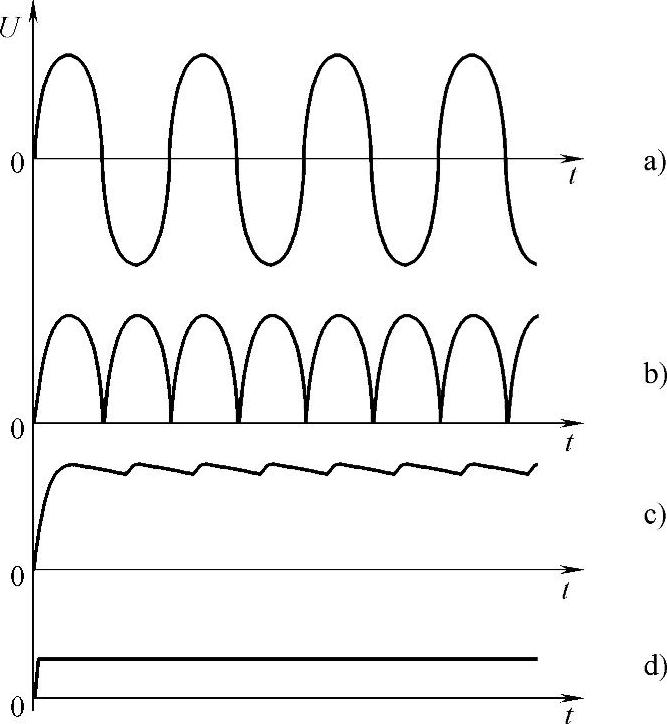
图5-18 励磁给定电路使用的直流电源波形
a)电源正弦波形 b)桥式整流后的波形 c)电容滤波后的波形 d)稳压管削波后的波形
将上述电压Ea和Eb极性相反的串接起来取其差值Ec,即Ec=Ea-Eb,用电压Ec通过触发电路控制三相全控整流桥中晶闸管的导通角,就能实现对励磁电流的自动控制过程,并保持励磁电流的稳定。
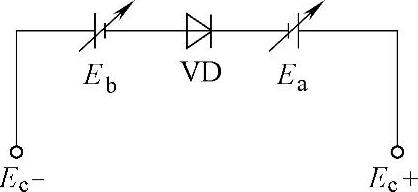
图5-19 励磁电流控制电压合成示意图
励磁电流控制电压的合成示意图如图5-19所示。其中电源Ea中的一个箭头表示给定电压信号可由一个电位器调整设定;电源Eb中的一个箭头表示该电压会随电源电压变化,同时因负反馈电位器的调整而有变化。
强励电路则是在励磁装置检测到电源电压降低到额定电压80%或以下时,让一个称做强励继电器的元件触头闭合。当然通过电子电路可以很方便地实现这一功能。强励继电器的闭合触头可以抬高上述励磁控制电压Ec的幅值,使励磁装置输出的励磁电压、励磁电流达到未强励时励磁电压、励磁电流的某一倍数,实现强励。如果强励达到一定时限,例如10s,交流电源电压仍不回升,励磁装置将退出强励状态。
(4)失步保护电路:在实际运行中由于某种原因,同步电动机会出现脱离同步的现象。同步电动机的这种运行状态称为失步。同步电动机失步将引起严重的电流、电压、功率及转速的振荡,对电网和电动机产生很大的冲击。同步电动机的失步原因很多,主要有以下三种:一是在较重的负载下,电网电压由于某种原因,如附近其他较大负载的投入等,引起电网电压暂时跌落,而导致同步电动机失步,叫做带励失步。二是励磁装置本身故障致使失去励磁引起的失磁失步。三是电网高压侧发生瞬时保护动作,而导致同步电动机失步,即断电失步。
励磁装置设计有失步监测及其保护环节。在励磁装置中,主控单元对转子电流和定子电流、功率因数和无功功率的变化进行监测,并考虑延时以躲过同步振荡,判定是否有失步发生。
当主控单元检测并确定电动机失步后,立即封锁投励信号,使电动机进入异步驱动阶段,然后电动机转速将上升,待进入临界转差后,装置自动控制励磁系统,按准确强励对电动机实施整步,使电动机恢复到同步状态。如整步失败,仍存在失步信号,装置发出跳闸信号动作于跳闸回路。
(5)触发电路:同步电动机励磁所需的直流电压是由三相全控桥中的六只晶闸管整流产生的,晶闸管的门极必须加上触发信号才能导通,该触发信号由触发电路提供。触发电路通过调整加到晶闸管上的触发信号的移相角来控制晶闸管的导通程度,亦即控制三相全控桥的整流输出电压,达到调节励磁电压和励磁电流的目的。
触发信号的移相角因以下原因而改变:
1)同步电动机在起动及投励时;
2)同步电动机定子绕组和励磁装置电源电压波动,通过负反馈稳定励磁时;
3)同步电动机定子绕组和励磁装置电源电压降低到额定电压80%启动强励时;
4)电位器调整给定的励磁电压和励磁电流时;
5)同步电动机失步及整步过程中。
触发电路根据以上控制信息,迅速、及时、准确地控制晶闸管的导通角,从而保证同步电动机持续稳定地运行。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。