



1.旋转磁场的产生
三相异步电动机是利用定子绕组中三相交流电所产生的旋转磁场与转子绕组内的感应电流相互作用而旋转的。
图1-5所示为异步电动机工作原理示意图。它由定子和转子两部分组成。定子和转子之间有一个很小的空气隙。定子的铁心槽内对称放置三相绕组,转子绕组则形成闭合回路。定子对称三相绕组接入交流电源,流过对称的三相交流电流。建立起定子三相合成旋转磁动势并产生定子旋转磁场。
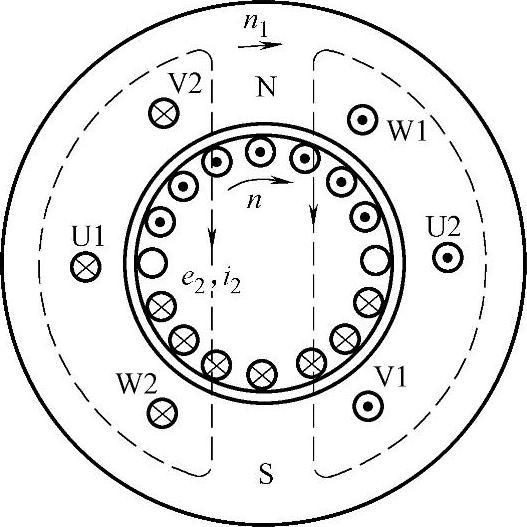
图1-5 异步电动机工作原理示意图
图1-5中的虚线表示某一瞬间定子旋转磁场的磁通,它以同步转速n1沿顺时针方向旋转,转子导体切割磁场感应电动势,该电动势的方向可用右手定则确定,它在闭路的转子绕组中产生有功分量与电动势同相位的电流。载流的转子绕组在旋转磁场中将受到电磁力的作用,可用左手定则确定此时转子绕组受到一个顺时针方向的电磁力和电磁转矩作用,使转子以转速n随着定子旋转磁场转向旋转。
转子随着旋转磁场旋转时如果转轴上有机械负载,电动机就拖动该负载做功,将输入的电功率转换为轴上输出的机械功率。
既然旋转磁场是电动机转子旋转的基础,那么三相旋转磁场产生的条件就是应该讨论的问题,这就是:
1)三相绕组必须对称,而且在定子铁心上按空间互差120°电角度分布。
2)通入三相对称绕组的电流也必须对称,即大小、频率相同,相位互差120°电角度。
为了实现三相绕组对称,三相绕组在定子铁心上的分布应遵循以下原则:
1)各相绕组在每个磁极下应均匀分布,以达到磁场对称的目的。为此,先将定子槽数按极数均匀分配,称为分极,每极为180°电角度。每极下又分为三相,称为分相,即分为3个相带,每个相带60°电角度。相带也叫极相组。三相绕组在每极下按U相、V相、W相相带顺时针方向均匀分布。
2)各相绕组的电源引出线应彼此相隔120°电角度。
3)同相绕组中相带线圈之间应顺着电流参考方向连接。
4)同一相绕组的各有效边在同性磁极下,电流参考方向应相同,而在异性磁极下的电流参考方向应相反。
2.旋转磁场的转速(https://www.xing528.com)
三相异步电动机旋转磁场的转速与异步电动机的极数有关,即电动机的极数就是旋转磁场的极数,因此旋转磁场的极数与三相绕组的安排有关。如果每相绕组只有一个线圈,各相绕组的始端之间相差120°,则产生的旋转磁场具有一对磁极,若用p表示磁极对数,则此时p=1。如果定子绕组每相有两个线圈串联,各相绕组的始端之间相差60°,则产生的旋转磁场具有两对磁极,即p=2。同理,若要产生三对磁极,即p=3的旋转磁场,则每相绕组必须有均匀安排在空间的串联的三个线圈,线圈的始端之间相差40°。
旋转磁场的转速决定于磁场的极数。当绕组中的电流变化一周时,一对磁极的旋转磁场在空间正好转过一周。对50Hz的工频交流电来说,旋转磁场每秒将在空间旋转50周,其转速n1=60f1=60×50=3000r/min。若旋转磁场有两对磁极,则电流变化一周,旋转磁场只转过0.5周,比极对数p=1时的转速慢了一半,即n1=60f1/2=1500r/min。同理,在3对磁极时,电流变化一周,旋转磁场仅旋转了1/3周,其转速n1=60f1/3=1000r/min。以此类推,当旋转磁场具有p对磁极时,旋转磁场转速为
n1=60f1/p
式中 n1——旋转磁场转速(r/min);
f1——交流电源频率(Hz);
p——电动机定子极对数。
旋转磁场的转速n1又称同步转速,它决定于电源频率f1和旋转磁场的极对数p。当电源频率f1=50Hz时,三相异步电动机同步转速n1与磁极对数p的关系见表1-1。
表1-1 f1=50Hz时的旋转磁场转速

3.电动机转子的转动方向、转速n和转差率s
异步电动机转子旋转的方向与旋转磁场的方向一致,而旋转磁场在空间的旋转方向是由三相电流的相序决定的。虽然两者的旋转方向相同,但转速却有差异,即转子的转速n始终低于旋转磁场的转速n1,这是因为产生电磁转矩需要转子中存在感应电动势和感应电流,如果转子转速与旋转磁场转速相等,两者之间就没有相对运动,转子导体将不切割磁力线,则转子感应电动势、转子电流均不能产生,也就不能产生推动转子转动的电磁转矩。所以,异步电动机运行的必要条件是转子转速和定子旋转磁场转速之间存在差异,“异步”之名,由此而来。另外,因为产生转子电流的感应电动势是由电磁感应产生的,所以异步电动机也叫做感应电动机。
异步电动机的转子转速n与定子旋转磁场的转速n1之间存在着转速差,此转速差正是定子旋转磁场切割转子导体的速度,它的大小决定着转子电动势及其频率的大小,直接影响到异步电动机的工作状态。该转速差与同步转速的比值称为转差率,用s表示,即
s=(n1-n)/n1
转差率是分析异步电动机运行情况的一个重要参数,例如异步电动机起动瞬间n=0,s=1,转差率最大;空载时n接近n1,s很小,在0.005以下;若n=n1,则s=0,称为理想空载状态,这种状态实际运行中并不存在。异步电动机工作时,转差率在1~0之间变化。额定负载时,其额定转差率s=0.01~0.07。
由以上分析可知,异步电动机的转动方向总是与旋转磁场的转向一致,因此,只要把定子绕组与三相电源连接的三条导线对调其中任意两条,就可以改变旋转磁场的转向,从而变换电动机的旋转方向。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。