



在本节中,我们以红绿灯动作控制为例,介绍S7 Graph的功能,如图6-4所示为红绿灯动作控制示意图。
1.创建项目及硬件组态
1)首先创建一个目录并完善目录的硬件组态,然后在块的目录里插入编写语言为GRAPH的功能块。
操作步骤为:单击“插入”→“S7块”→“功能块”,如图6-5所示。
2)在插入功能块的过程中,自动弹出咨询设置功能块属性的对话框,如图6-6所示。
在创建语言栏里选择“GRAPH”,如果有必要同时可以填写其他的一些附加信息,然后单击“确定”。
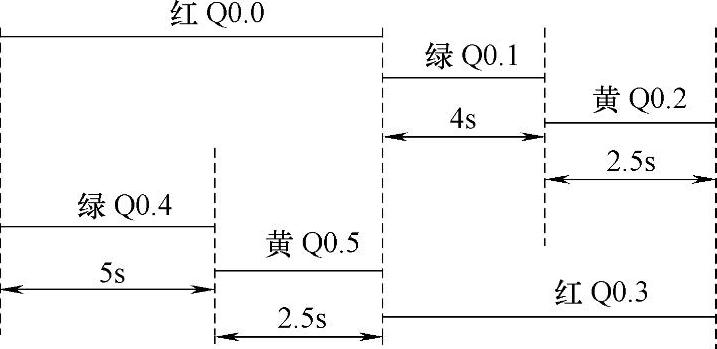
图6-4 红绿灯动作时序图
Q0.0、Q0.1和Q0.2代表东西方向的交通灯;Q0.3、Q0.4和Q0.5代表南北方向的交通灯。
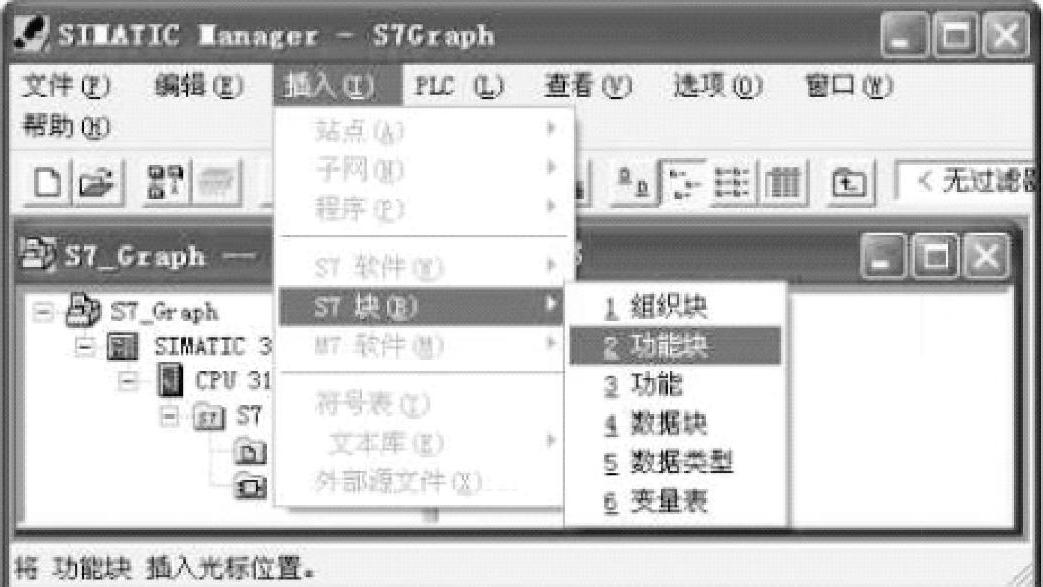
图6-5 S7项目管理界面
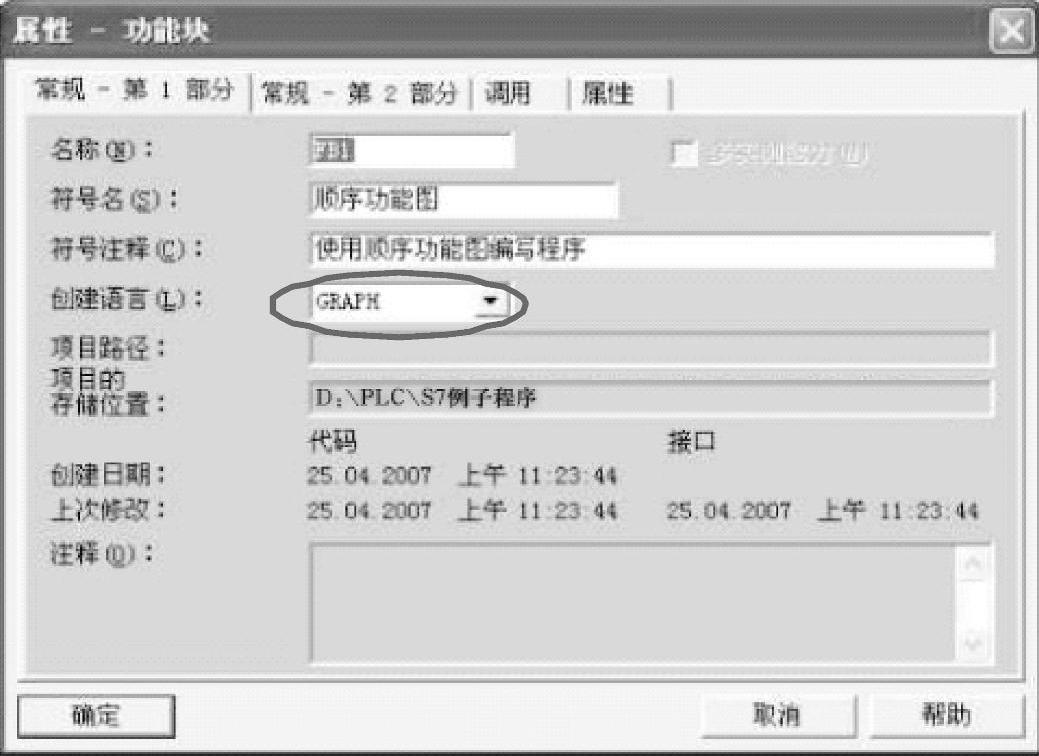
图6-6 声明FB1的编程语言使用GRAPH
3)在块目录里可以看到刚插入的功能块(本例是FB1),双击FB1的图标打开FB1的编程界面,自动创建了第1“步”(S1)和第1个“转移”(Trans1),如图6-7所示。
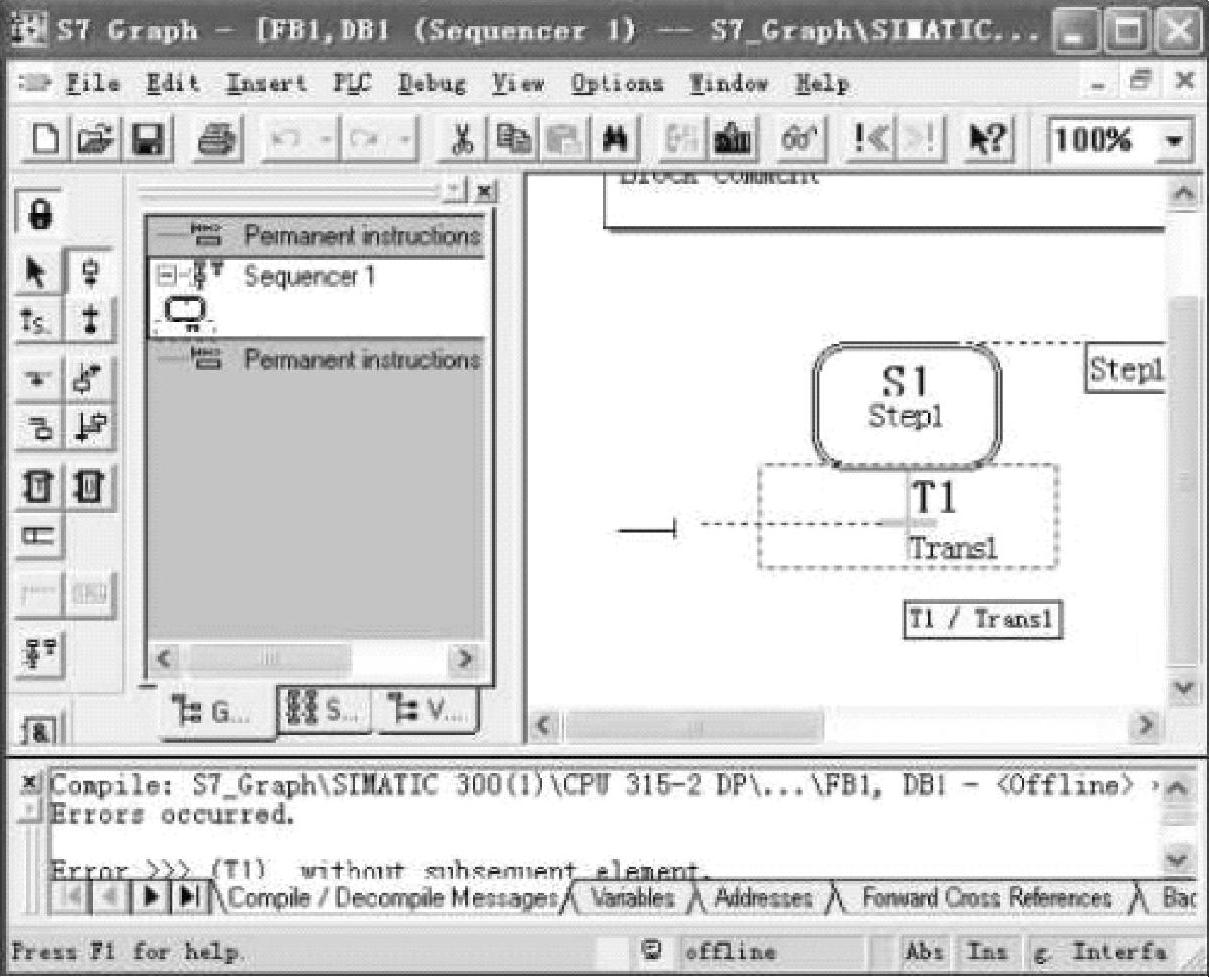
图6-7 插入“步”
提示:
浏览窗口里可以查看Graphics(图形)、Sequencer(顺序器)和Variables(变量)3种浏览界面,如图6-8所示。
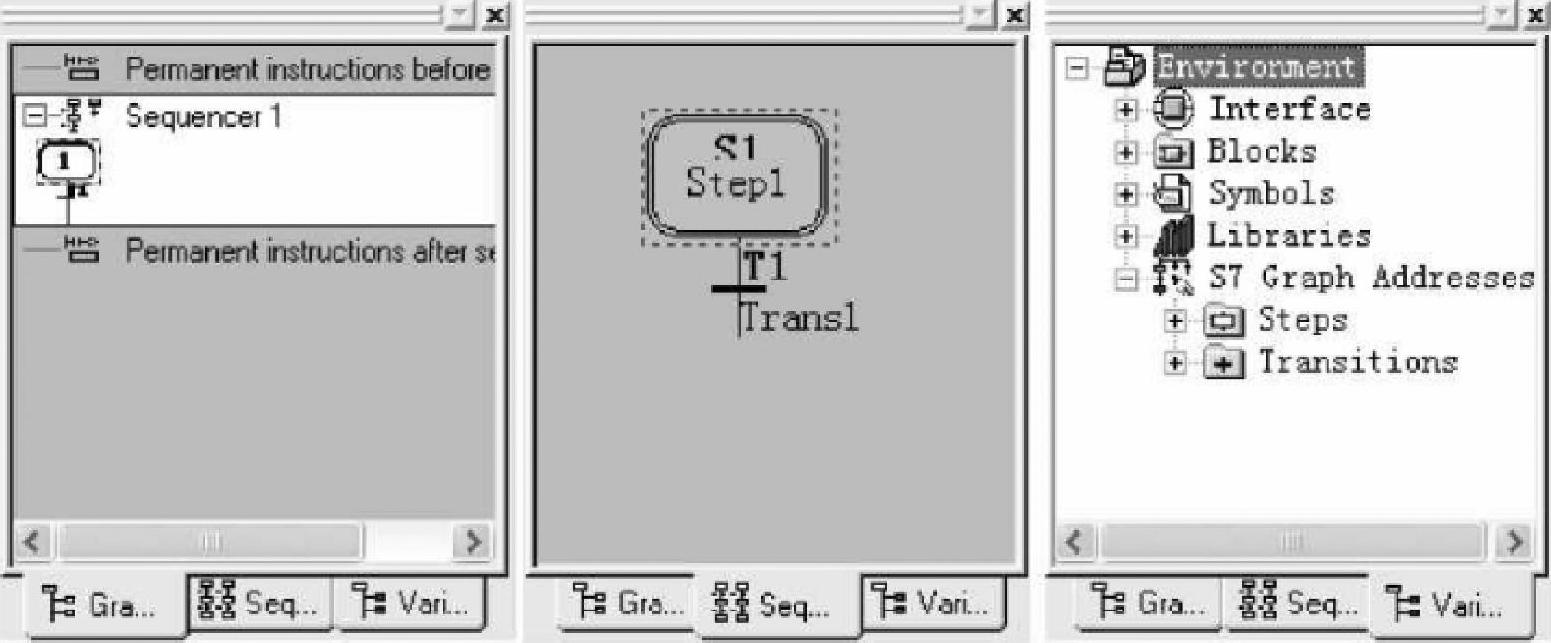
图6-8 浏览窗口的3种界面
Graphics(图形)浏览窗上面和底下是永久程序界面,中间是分层的Graph程序界面。
Sequencer(顺序器)浏览窗可以浏览程序的总体结构,同时可以浏览程序界面的局部内容。
Variables(变量)浏览窗可以浏览到编程时可能用到的元素,在这里除系统变量外,可以定义、编辑及修改变量。
一个S7 Graph FB最多可以编写250个“步”和250个“转换”。当S7 Graph FB激活时总是从最顶的“步”或从初始“步”开始执行。
一个S7 Graph FB可以编写多个Sequencer(顺序器)。每个Sequencer(顺序器)最多可以编写256个分支、249个并行分支及125个选择分支,具体容量与CPU型号有关。
一个顺序控制项目至少由S7 GraphFB(可以是OB、FC、SFC、FB、SFB)、Sequencer(可以有多个顺序器)和DB(数据块,包括SDB)组成。
2.创建时序动作“步”
1)再回来分析图6-4所示的红绿灯时序动作,可以使用4个“步”来完成控制。在FB1里增加“步”,方法是使用鼠标单击“Trans1”附近(虚线框大小的范围),然后单击“ ”符号,即可以在指定地方插入一个“步”和一个“转移”,如图6-7所示。
”符号,即可以在指定地方插入一个“步”和一个“转移”,如图6-7所示。
2)S7 Graph在进行插入操作中,允许两种模式:Direct(直接)模式和Drag-and-Drop(拖放)模式。
选择Direct模式:单击“Insert”→“Direct”表示选择直接模式。也可以单击Sequencer”工具条的“ ”图标让其凸上来,表示选择直接模式,如图6-9所示。
”图标让其凸上来,表示选择直接模式,如图6-9所示。
使用Direct(直接)模式:首先在界面选择准备插入的位置,然后单击图6-9所示希望插入的目标图标,即可以在指定位置插入期待的目标。如果是插入多个相同的目标,可以连续单击目标的图标,每单击一次就插入一个。
选择Drag-and-Drop(拖放)模式:单击“Insert”→“Drag-and-Drop”表示选择拖放模式。也可以单击“Sequencer”工具条的“ ”图标让其凹下去,表示选择拖放模式,如图6-9所示。
”图标让其凹下去,表示选择拖放模式,如图6-9所示。
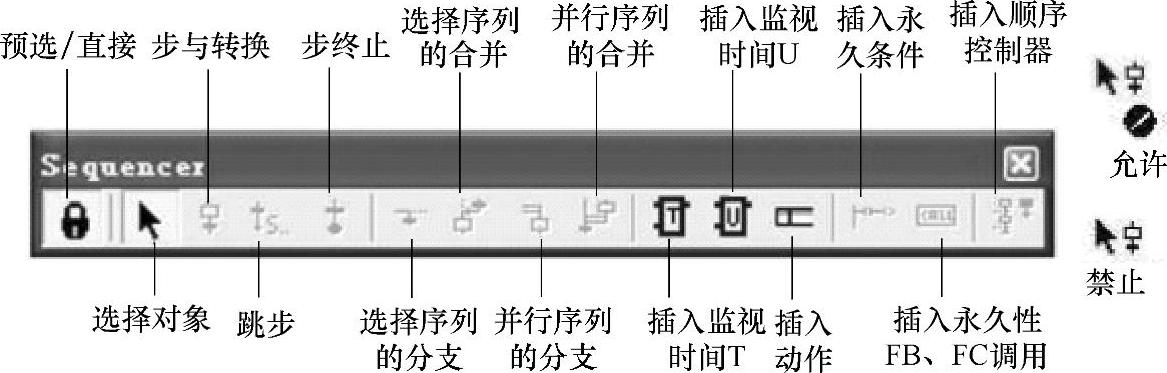
图6-9 “Sequencer”工具条
插入“步”的动作框:首先选择插入模式“直接”或“拖放”,然后单击“Insert”→“Action”或“ ”图标,即可以插入“步”的动作框,如图6-10所示。
”图标,即可以插入“步”的动作框,如图6-10所示。
3)在动作框里编辑控制动作,每一个动作框包含指令和地址。比如在动作框左边写上指令“N”,在右边写上地址“Q0.0”,表示当该“步”为活动步时Q0.0输出“1”,当该“步”为不活动步时Q0.0输出“0”,如图6-11所示。
4)按照同样方法把每一“步”的动作框编写完整,如图6-12所示。
动作框里常用的指令见表6-1。(https://www.xing528.com)
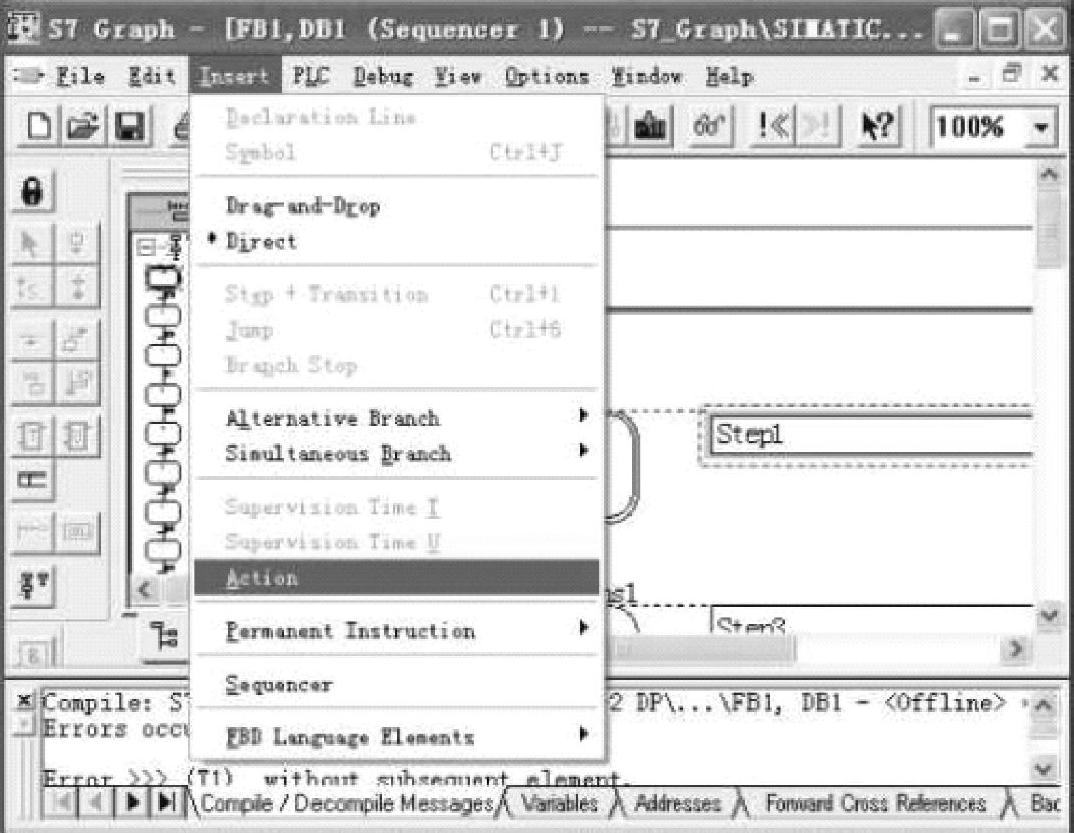
图6-10 增加“步”
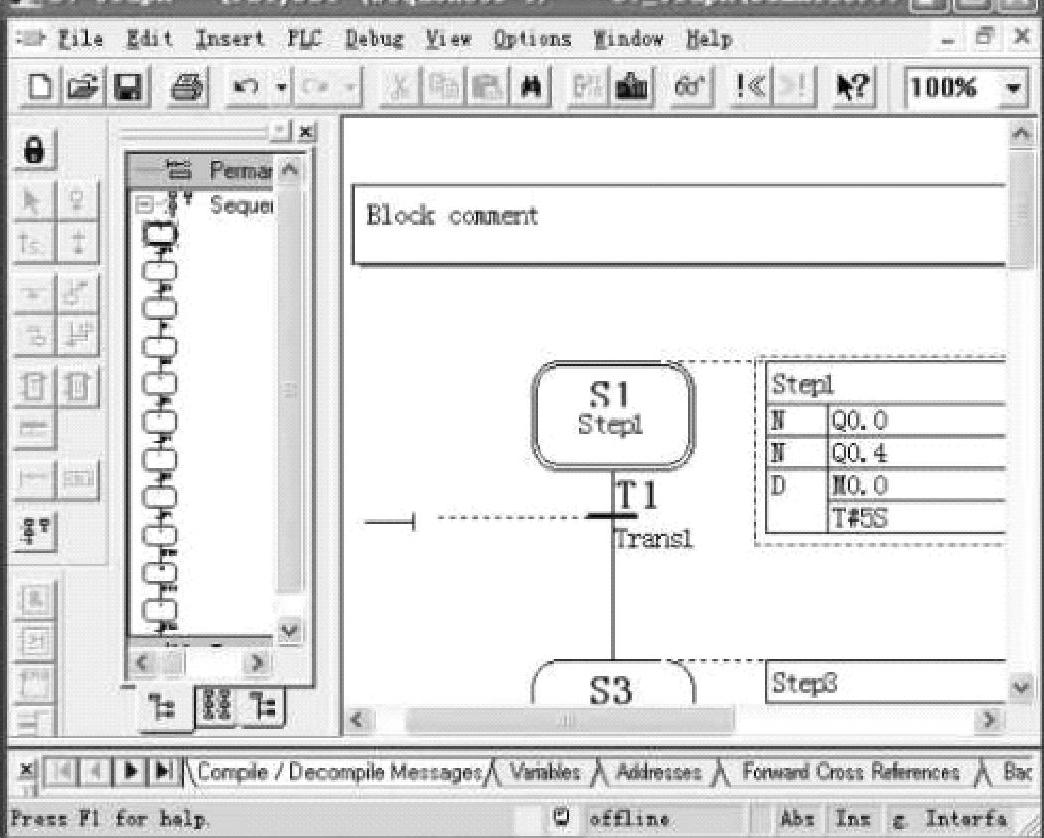
图6-11 编辑“步”
表6-1 动作框常用指令
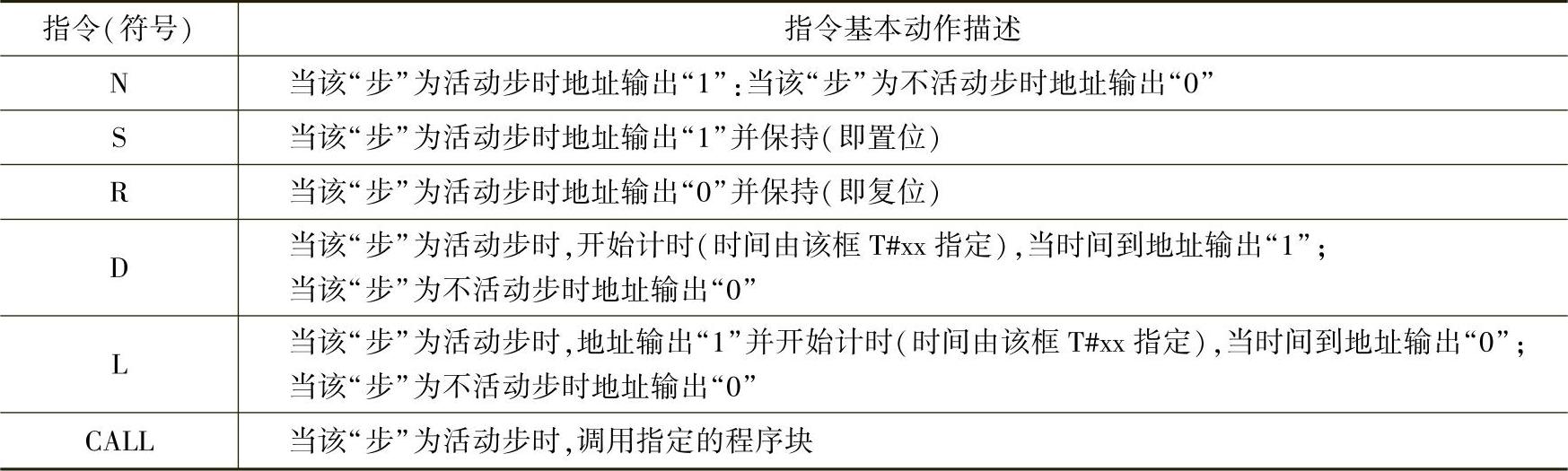
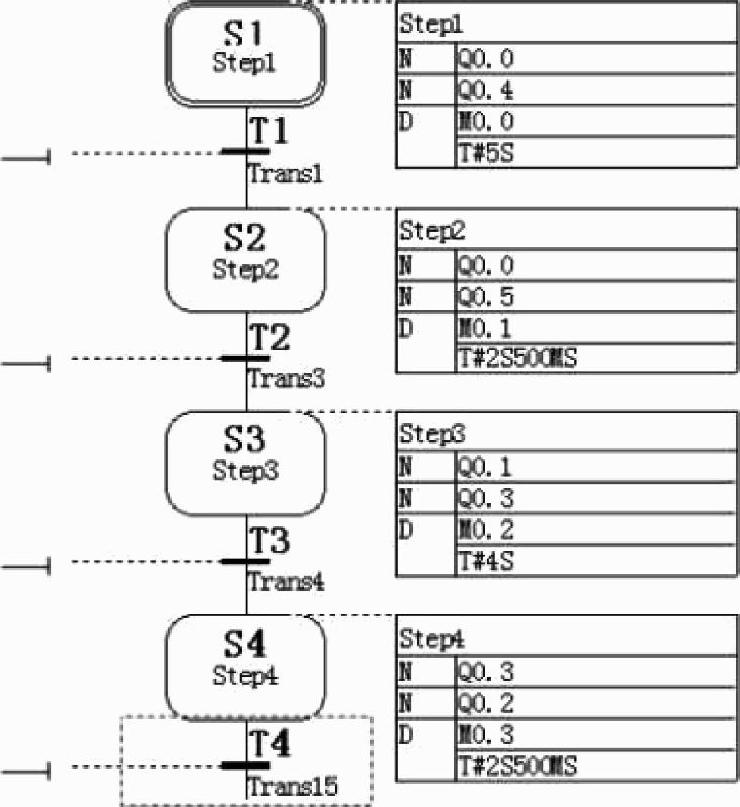
图6-12 “步”动作
5)编写转移条件的程序,转移条件程序的编写语言有LAD(梯形图)和FBD(功能图块)两种,单击“View”→“LAD”或“FBD”可以在这两种语言中互相切换,如图6-13所示,本例选择LAD梯形图。
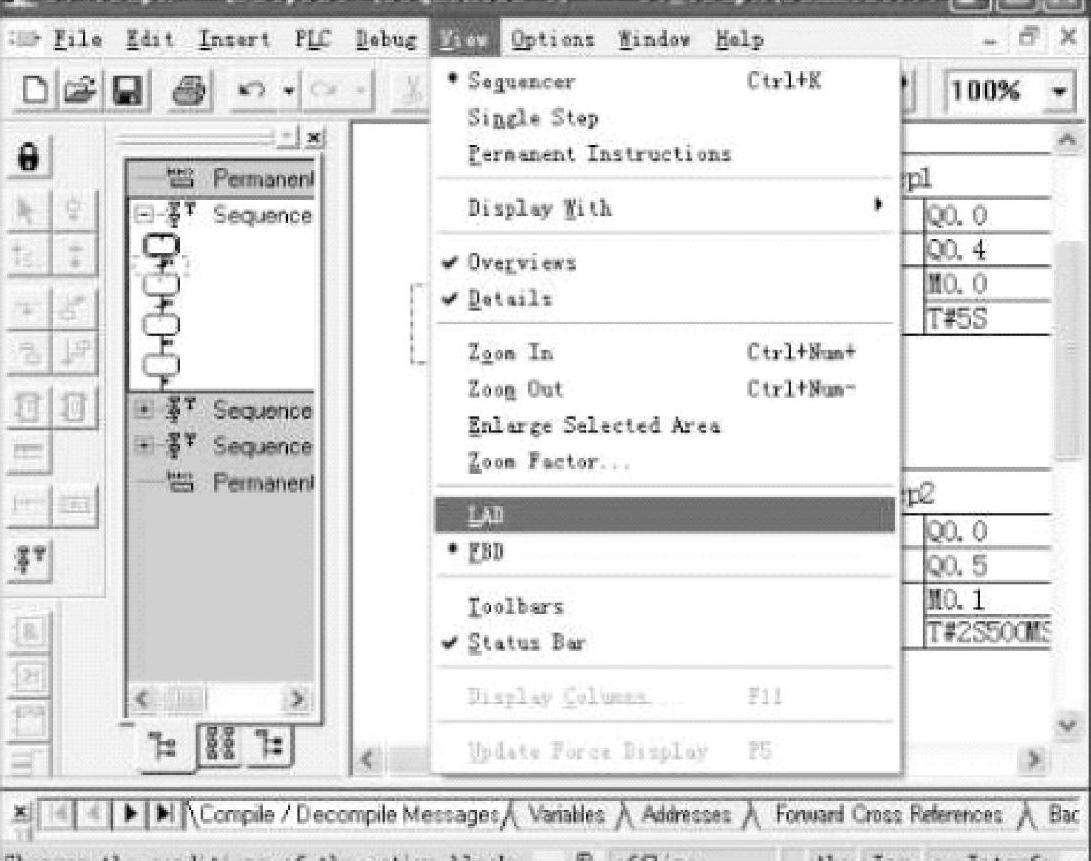
图6-13 选择编辑转移条件程序的语言
转移条件程序的指令一般可以是常开触点、常闭触点、比较指令、监视时间T或监视时间U,在顺序器工具条中分别用“ ”、“
”、“ ”、“
”、“ ”、“
”、“ ”和“
”和“ ”表示(选择梯形图编程语言时)。
”表示(选择梯形图编程语言时)。
插入转移“指令”:首先选择插入模式“直接”或“拖放”,然后单击“ ”、“
”、“ ”、“
”、“ ”、“
”、“ ”或“
”或“ ”图标,即可以在指定地方插入转移指令。然后在每个指令的地方写上地址即可。比如选择“直接”模式,选中“步1”(S1)的转移指令地方,再单击“
”图标,即可以在指定地方插入转移指令。然后在每个指令的地方写上地址即可。比如选择“直接”模式,选中“步1”(S1)的转移指令地方,再单击“ ”就可以把常开触点指令放到“步1”(S1)的转移指令里,如图6-14所示,然后写上指令的地址“M0.0”,如图6-15所示。
”就可以把常开触点指令放到“步1”(S1)的转移指令里,如图6-14所示,然后写上指令的地址“M0.0”,如图6-15所示。
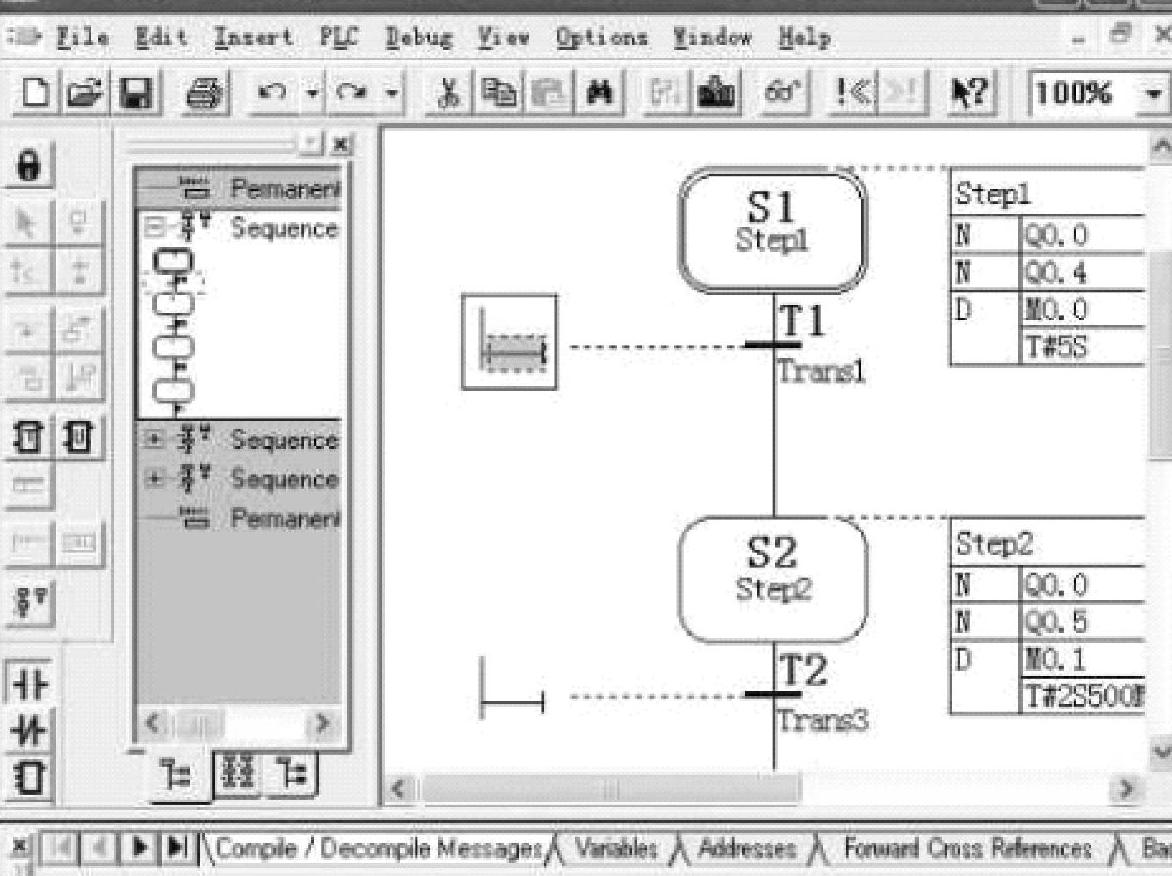
图6-14 写上转移条件的程序指令
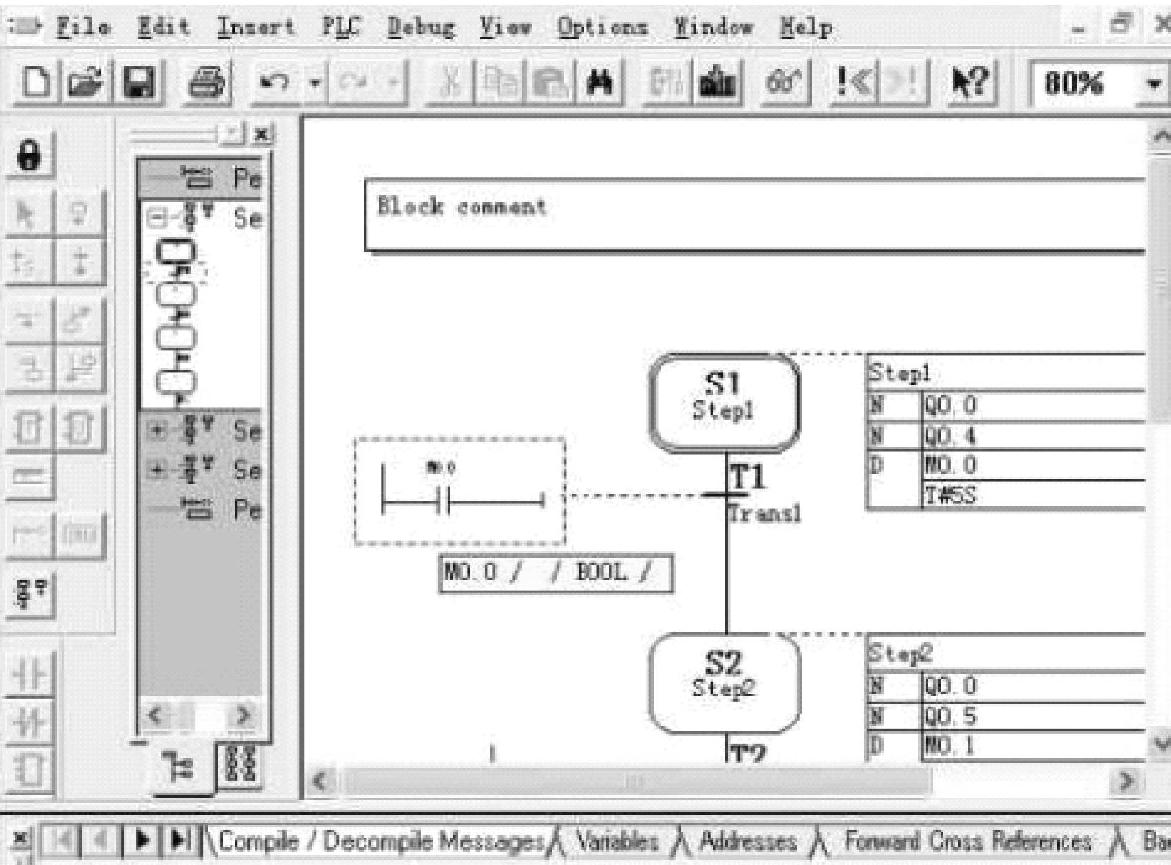
图6-15 写上指令的软元件地址
6)使用同样方法编写其他步的转移指令,如图6-16所示。
顺序器中“步”的最后一般是跳转或结束指令,在顺序器工具条中分别用“ ”和“
”和“ ”表示。
”表示。
插入跳转或结束“指令”:首先选择插入模式“直接”或“拖放”,然后单击“ ”或“
”或“ ”图标,即可以在指定地方插入跳转或结束指令。如果是跳转指令还需要写上跳转到那一“步”的地址代码。如果选择“直接”模式,选中“步4”(S4)的跳转或结束指令地方,再单击“
”图标,即可以在指定地方插入跳转或结束指令。如果是跳转指令还需要写上跳转到那一“步”的地址代码。如果选择“直接”模式,选中“步4”(S4)的跳转或结束指令地方,再单击“ ”就可以把跳转指令放到“步4”(S4)的跳转或结束指令里,如图6-17所示,然后写上指令的地址“S1”,如图6-18所示,意思是要求完成“步4”(S4)后跳转到“步1”(S1),完成一个动作周期后开始下一个动作周期。
”就可以把跳转指令放到“步4”(S4)的跳转或结束指令里,如图6-17所示,然后写上指令的地址“S1”,如图6-18所示,意思是要求完成“步4”(S4)后跳转到“步1”(S1),完成一个动作周期后开始下一个动作周期。
7)在FB1程序编辑界面,单击“ ”进行编译和保存,如图6-19所示。自动调用标准及系统功能如图6-20所示。在管理界面块目录里双击打开OB1,在OB1里无条件调用FB1,声明DB1为FB1的背景数据,在FB1里写上实形变量,如图6-21所示,单击“
”进行编译和保存,如图6-19所示。自动调用标准及系统功能如图6-20所示。在管理界面块目录里双击打开OB1,在OB1里无条件调用FB1,声明DB1为FB1的背景数据,在FB1里写上实形变量,如图6-21所示,单击“ ”进行编译及保存OB1。
”进行编译及保存OB1。
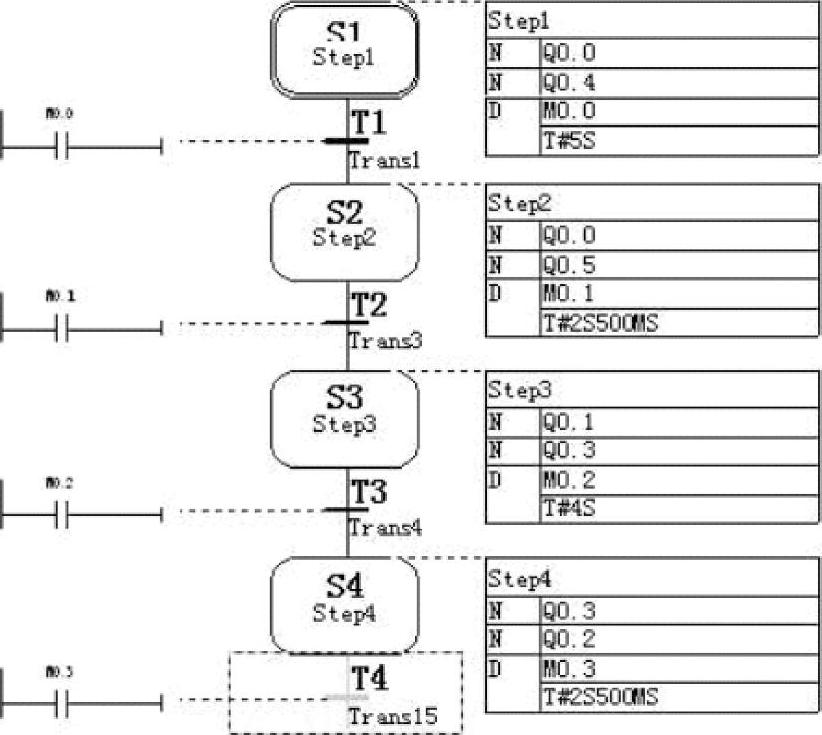
图6-16 完成各“步”转移条件的程序
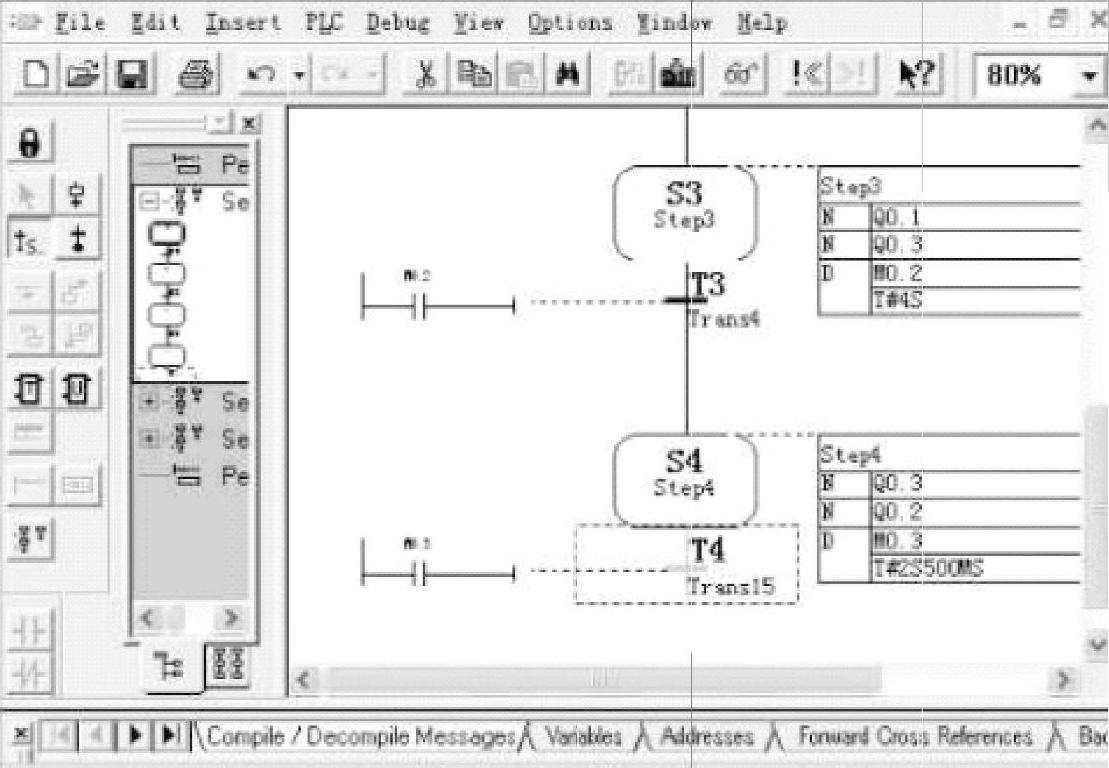
图6-17 插入跳转或结束
3.调试
1)打开PLCSIM(或实际的PLC),在管理界面里把站的所有信息下载到CPU中。在PLCSIM界面里打开QB0、MB0及MB1的垂直变量窗口,并单击“Tools”→“Options”→“At-tach Symbols”,按照保存的路径打开该项目的符号表并双击符号表,符号信息即可以显示在PLCSIM界面了,如图6-22所示。
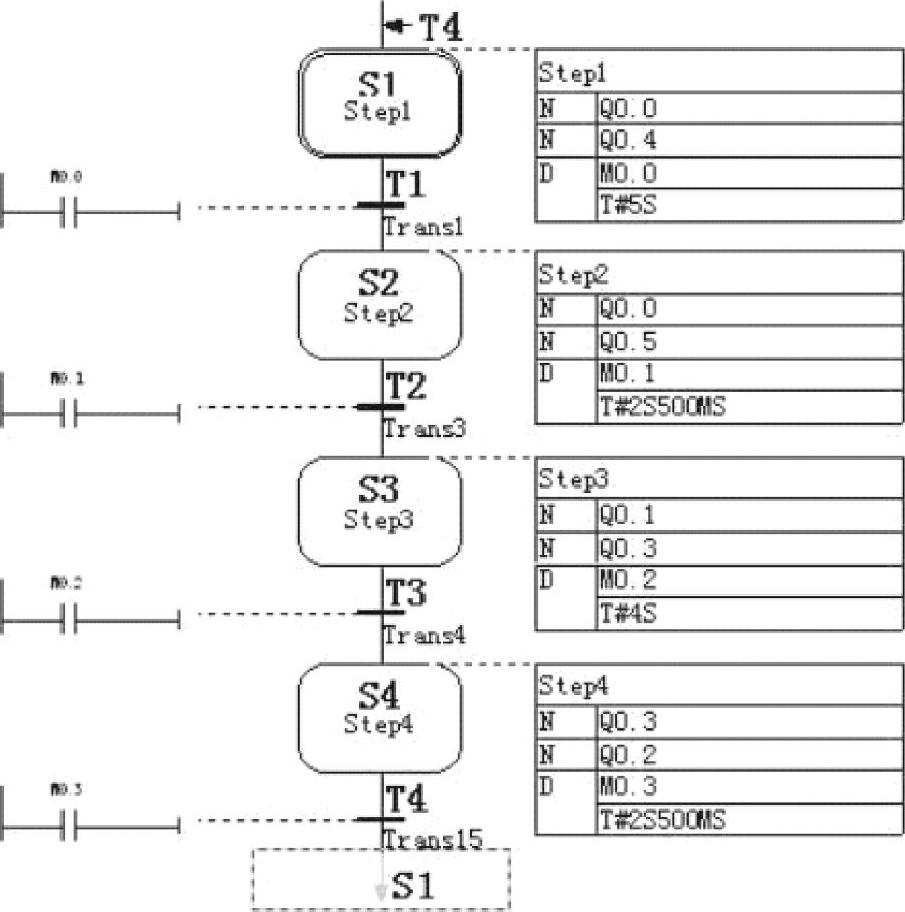
图6-18 完整的红绿灯各“步”程序
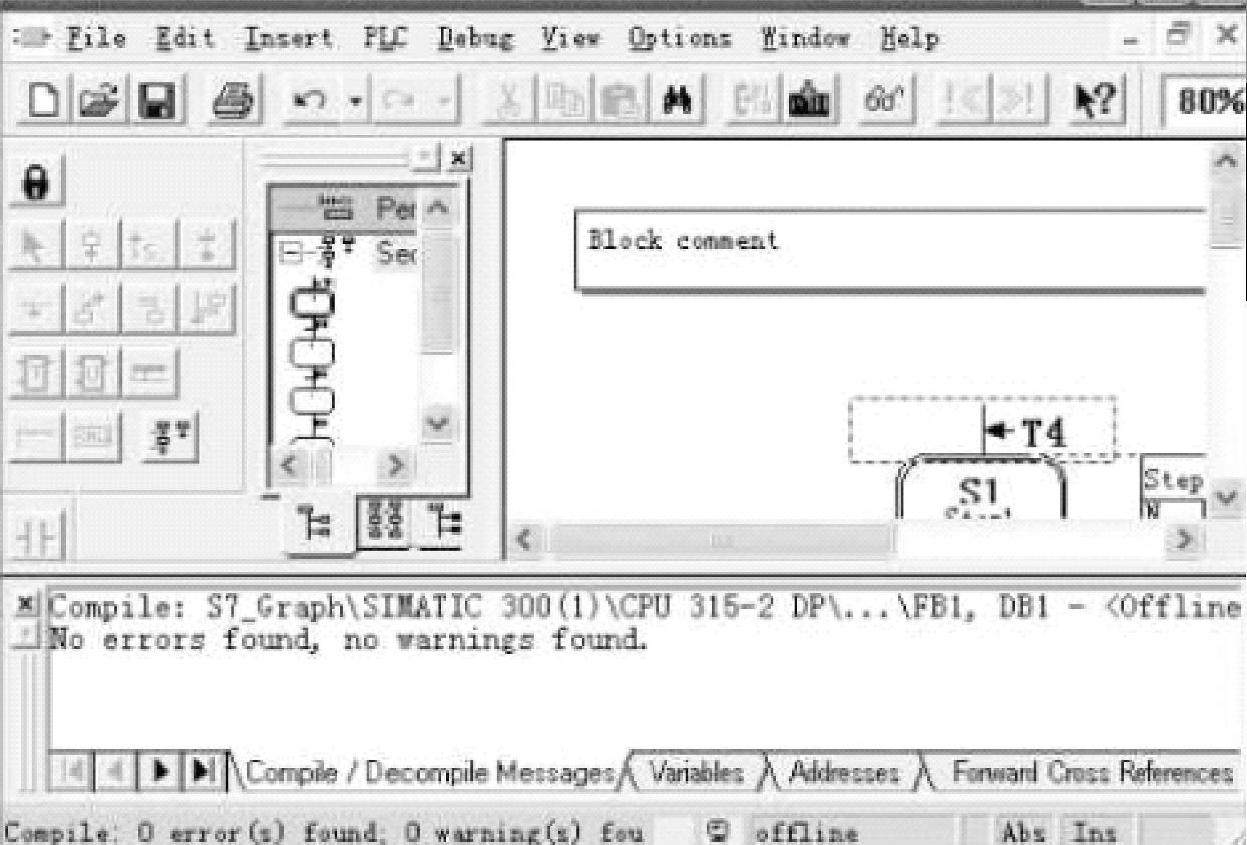
图6-19 保存编译FB1
2)现在开始调试程序。接通M0.5关闭FB1的顺序器,使所有的“步”都变为不活动的“步”,再接通M1.0准备自动连续执行(M1.4自动灯亮起来了),断开M0.5接通M0.6激活FB1的顺序器,可以看到交通灯按照图6-4所示的时序图亮起来了。
3)现在进行单步调试。接通M0.5关闭FB1的顺序器,使所有的“步”都变为不活动,再接通M1.1准备自动单步执行(M1.5单步灯亮起来了),断开M0.5接通M0.6激活FB1的顺序器,可以看到Q0.0和Q0.4亮起来了,5s后M0.0也亮起来了;这时接通M1.2马上转移到下一步执行,可以看到Q0.0和Q0.5亮起来了,2.5s后M0.1也亮起来了;这时接通M1.2马上转移到下一步执行,可以看到Q0.1和Q0.3亮起来了,4s后M0.2也亮起来了;这时接通M1.2马上转移到下一步执行,可以看到Q0.2和Q0.3亮起来了,2.5s后M0.1也亮起来了;再接通M1.2马上转移到下一个动作周期执行。
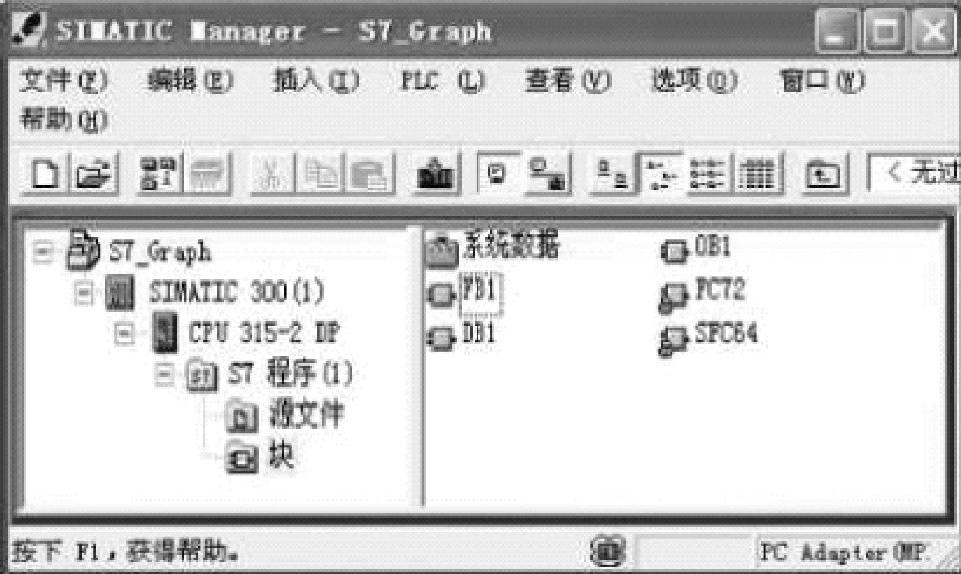
图6-20 自动调用标准及系统功能
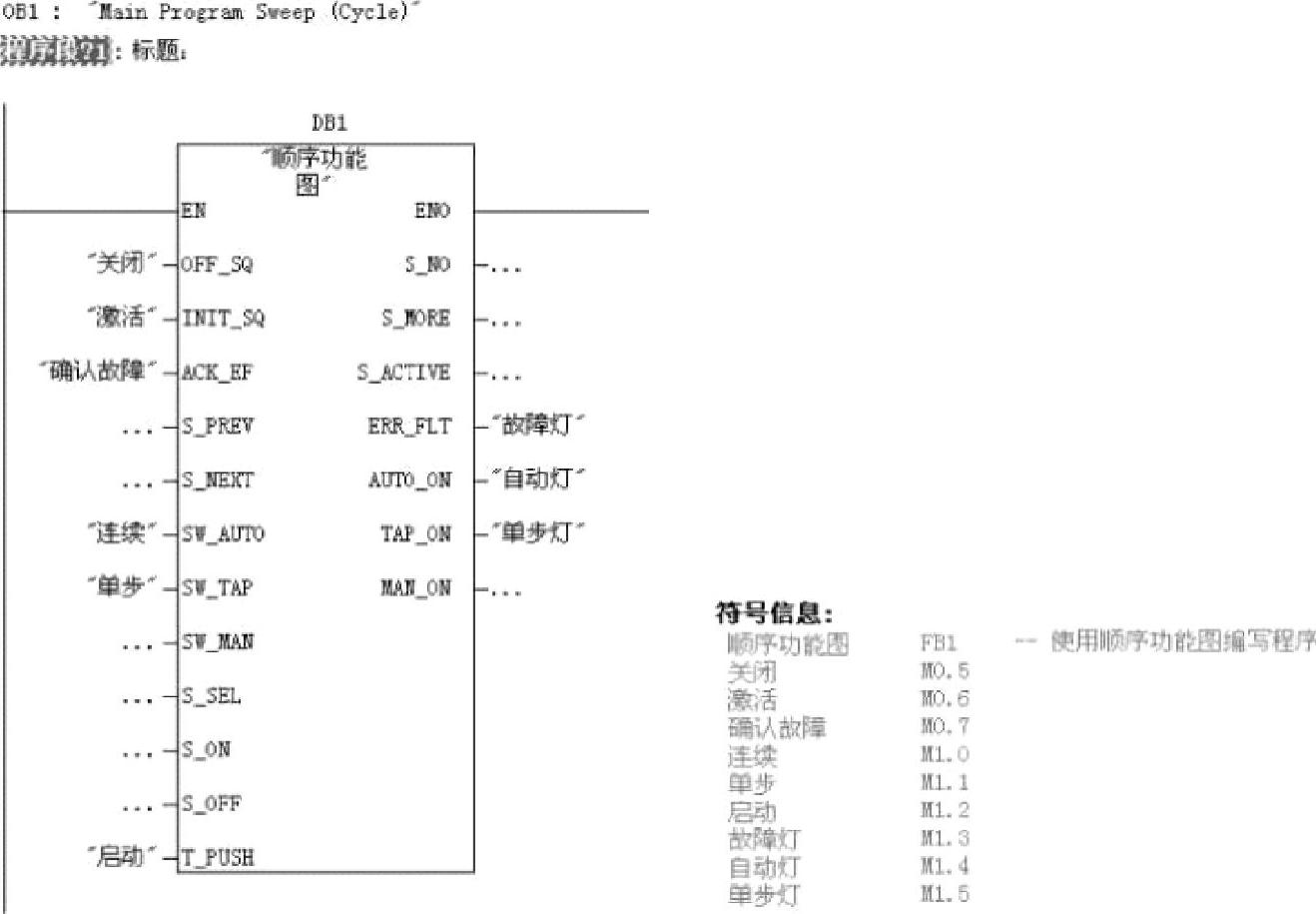
图6-21 在OB1里调用FB1
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。